Downloaded 18 times

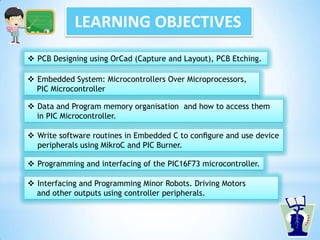
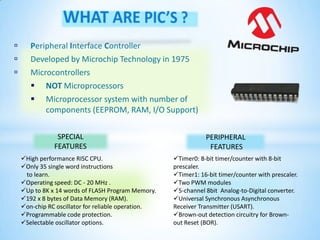
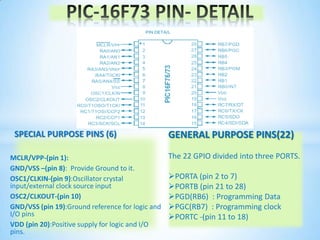

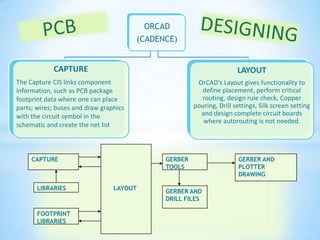
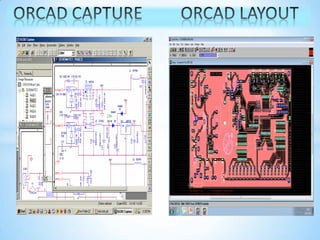
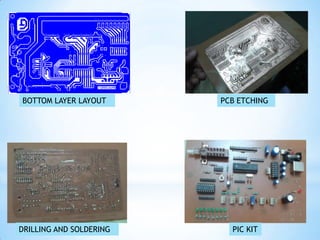
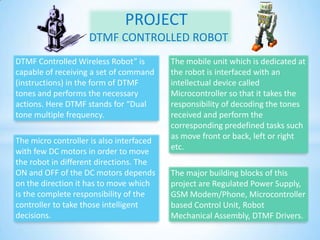
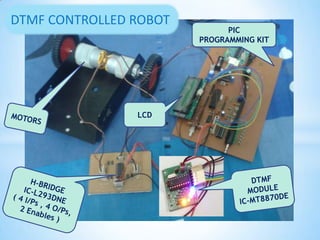

The document outlines learning objectives related to programming microcontrollers, specifically the PIC16F73, using embedded C and interfacing with various devices. It discusses PCB design using Orcad software and the advantages of microcontroller-based embedded systems over microprocessors. Additionally, the document describes the development of a DTMF-controlled robot project that utilizes these principles for operation and control.







![Pic microcontroller [autosaved] [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/picmicrocontrollerautosavedautosaved-120427093459-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)