Download as PDF, PPTX

![8
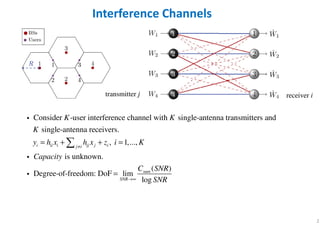
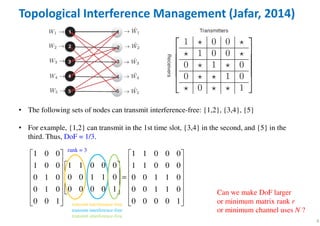
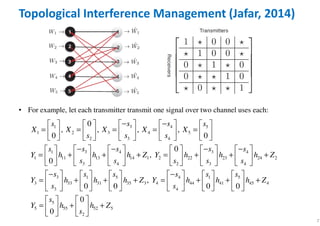
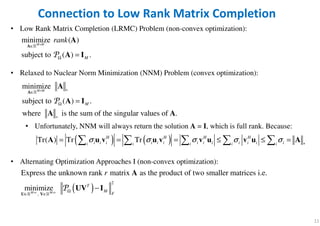
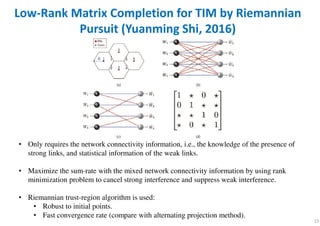
• For example, let each transmitter transmit one signal over two channel uses each:
3 41 5
1 2 3 4 5
32 4
3 34 41
1 11 13 14 1 2 22 23 24 2
3 34 2 4
3 1
3 33 31
3
0
, , , ,
0 0
0
,
0
0
s ss s
X X X X X
ss s
s ss ss
Y h h h Z Y h h h Z
s ss s s
s s
Y h h
s
− −
= = = = =
− −− −
= + + + = + + +
−
= +
45 1 5
35 3 4 44 41 45 4
4
5
5 55 52 5
2
,
0 0 0
0
0
ss s s
h Z Y h h h Z
s
s
Y h h Z
s
−
+ + = + + +
= + +
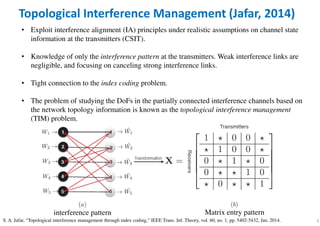
Topological Interference Management (Jafar, 2014)
1 1 1 1 0 0 1
1 1 1 1 0 0 1
1 0 1 1 1
0 1 0 1 1 1 0
0 1 1 1 0
0 1 0 1 1 1 0
1 0 1 0 1 1 1
− −
=
− −
DoF = 1/2[ ] [ ] [ ]1 3 5 interference-fre1 1 , 0 1 , 1 0 transmit at the 1st timee slotY Y Y
transmit interference-free
transmit interference-free
rank = 2
Can we make DoF larger
or minimum matrix rank r
or minimum channel uses N ?](https://image.slidesharecdn.com/briefintroductionabouttopologicalinterferencemanagementtim-200908025234/85/Brief-Introduction-About-Topological-Interference-Management-TIM-8-320.jpg)
![10
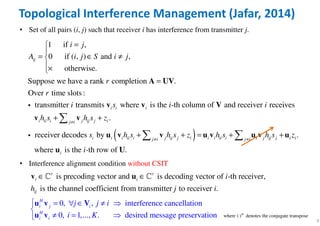
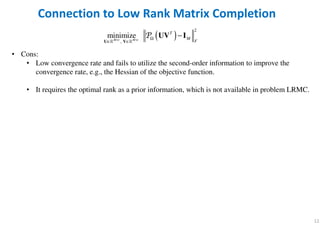
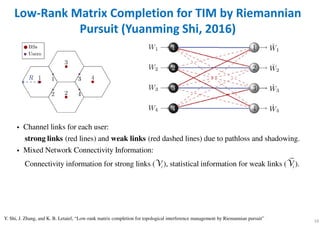
Connection to Low Rank Matrix Completion
1
DoF
r
=
• Challenges :
• What is the minimum possible rank r for a given interference pattern ?
• For a given r, how to find such matrices (if they exist) ?
• How to use low-rank matrix completion approach to solve the TIM problem ?
is precoding vector and is decoding vector of -th receiver,
is the channel coefficient from transmitter to receiver .
0, , interference cancellation
0, 1,...,
r r
i i
ij
H
i j i
H
i i
i
h j i
j j i
i
∈ ∈
= ∀ ∈ ≠
≠ =
v u
u v V
u v
ℂ ℂ
, can be rewritten as ( )
. desired message preservation
where [ ] with , is identity matrix, and
: is orthogonal projection operator onto the subspace of
M
M M
ij i Mi
M M M M
K
M M M M
Ω
×
× ×
Ω
=
= ∈ = ×
→
A I
A A I
P
P
ℂ
ℝ ℝ
1 1
matrices i.e.
, if ( , )
( ) .
0, otherwise
assume , [ ] , with [ ,..., ] , [ ,..., ]
we have ( ) .
ij
H H M M H M N N M
i j K K
i j
N M
rank N
Ω
× × ×
∈Ω
=
≤ = = ∈ = ∈ = ∈
=
A
A
A u v U V U u u V v v
A
P
ℂ ℂ ℂ](https://image.slidesharecdn.com/briefintroductionabouttopologicalinterferencemanagementtim-200908025234/85/Brief-Introduction-About-Topological-Interference-Management-TIM-10-320.jpg)


This document discusses topological interference management (TIM) techniques for interference channels. TIM exploits interference alignment principles under realistic channel state information assumptions. The key ideas are: - Focus on canceling strong interference links based on knowledge of the interference pattern - There is a connection between TIM and the index coding problem - The goal of TIM is to maximize degrees of freedom (DoF) based on network topology information - Examples show how transmitting signals over multiple channel uses and exploiting the interference pattern can achieve different DoF values through interference alignment