12
(
: .
ex :, ...
, :
(0
) ( )
: ,
:
( ):
( )
1 or 1, 1)
n B
n
n
B
n
s t a g t nT
a n
g t
T
a s t
∞
=−∞
+
= −
−
∴
∑
∵
數字基帶信號的表示式 表示信息碼元的單個脈衝的波形並非一定是矩形的
高斯脈衝 升餘弦脈衝 但不管形式如何皆可用數學表示
若表示各碼元的波形相同而電平取值不同 則數字基帶信號可表示為
第 個碼元所對
是一個隨機量 實際
應的電平值
碼元持續時間
某種脈衝波
遇到的基帶信號
形.
都是
1
2
( ) ( )
( )
( ),
( )
( ),
.
(1 )
n
n
n
B
n
B
s t s t
s t
g t nT P
s t
g t nT P
N
∞
=−∞
=
−
=
− −
∑一個隨機脈衝序列
以機率 出現
可以有 種不同的脈衝
以機率 出現
波形
14
1
1 2
2
, ,.
, , :
( ) ( ) ( )
( ) ( )
[ ( ) (1 ) ( )] ( )
( )
, ( )
( )
, ( )
B B n
n n
B
s t v t u t
Pg t nT P g t nT v t
g ts t
v
g t
v t v t T
t
∞ ∞
=−∞ =−∞
= − + − − =∑ ∑
為了使頻譜分析的物理概念清楚 推導過程簡化 我們可以把 分解成穩態波 和交變波
所謂 它取決於每個碼元內出現 和 的機率加權平均 因此可表示成
由於 在每個碼元內的統計平均波形相
穩態波 即隨機序列 的統計平均分量
同 故 是以 為週期
1 1 2 1 2
2 1 2 1 2
( ) ( ) ( ) ( ) ( ), ( ) ( )
( ) ( ) (1 ) ( ) (1 )[ ( ) ( )],
( )
( ) ( ) (1 ) ( ) [ ( ) ( )],
)
.
,( n
n
B B B B B
n
B B B B B
u t s t v t u t u t
g t nT Pg t nT P g t nT P g t nT g t nT P
u t
g t nT Pg t nT P g t nT P g t nT g t n
s t v tu t
T
∞
=−∞
= − =
− − − − − − = − − − −
=
− − − − − − = − − − −
∑
的週期信號
是交
以機
變 與波
率
之差 即
以
1 2
(1 )
1 ,
( ) [ ( ) ( )] where
, (1 )
( .)
n n B B n
P
P P
u t a g t nT g t nT a
P
u
P
t
−
−
= − − − =
− −
機率
以
或寫成
是一個隨機脈
機率
以 率
衝序列
機
思路思路思路思路:::: 分解 交變波 穩態波思路思路思路思路:::: 分解 交變波 穩態波
)( )) ((u ts t v t= +
( (( )) )s u vP ff PP f= +
計算出穩態波和交變波的PSD
就可得隨機脈衝序列s(t)頻譜特性
15.
15
1 2
2 22
2
12
1
( ) [ ( ) (1 ) ( )]
1 1
( ) wher
, so Fourier
/ 2, /
e , ( )
( ) ( ) ( ) (1 ) ( )
1
(
( )
2 ( 0)
)
B
B B
B
B B
n
T
j mf t j mf t
Tm B m
m B B
B B
m
B
B v t Pg t nT P g t nT
v t C e f C v t e dt
T T
T T v t Pg t P g t
C Pg
t
t
T
n
T
v
π π
∞
=−∞
∞
−
−
=−∞
= − + − −
= = =
=− =
=
∴ + −
+
∑
∑ ∫
∵
是以 為週期的週期由於 可以展成 級數
在 範圍內
信號
[ ]
[ ]
22
2
2
2
1 2 1 2
2 2
1 1 2 2
Fourier P
(1 ) ( )
1
( ) (1 ) ( ) [ ( ) (1 ) ( )]
w
( )
SD
here ( ) ( ) , ( ) ( )
[
B
B
B
B
B B
T
j mf t
T
j mf t
m B B B
B
j mf t j mf t
v B
B B
P g t e dt
C Pg t P g t e dt f PG mf P G mf
T
G mf g t e dt G mf g t e
P f f G
t
P
d
π
π
π π
−
−
∞
−
−∞
∞ ∞
− −
−∞ −∞
−
⇒ = + − = +
=
−
= =
∫
∫
∫ ∫
根據週期信號的功率譜密度與 係數的關係可得 :
2
1 2
2
( ) (1 ) ( )] ( ) ( )
( 0) ( 1
. PSD
).
B B B
m
v mmf P G mf f mf P f C
m m
δ
∞
=−∞
=
+ − −
=
∑ 振幅取決於 的離散線譜,
根據離散線譜可以推得隨機序列是否包含直流分量 和定時分量
穩態波的
1. v(t)的功率譜密度的功率譜密度的功率譜密度的功率譜密度Pv(f)
17
2
2 2
( )
[( ) ]
( ) lim
( ): ( ) ( )
(
,
) ( ) .
[ ( ) ] [ ( ) ]
( ) l
:
: , 2 1 ,
im ( ) lim
(2
2 1
T
u
T
T
B
T T
u u
T N
T
u t
u t u t
E
T N
E U f
P f
T
U f
T
E U f E U f
P f P f
N
N
T
T N
→∞
→∞ →∞
+
=
= +
= ⇒ =
由於 是一個功率型的隨機脈衝序列 它的功率譜密度可採用截短函數和統計平均的方法來求
的截短函數 所對應的頻譜函數
統計平均
截取時間 設它等於 個碼元的長度 即 是一個足夠大的整數
1 2
22 2
1 2 1 2
2
1 1 2
1)
( )
( ) ( ) [ ( ) ( )]
( ) ( ) [ ( ) ( )] [ ( ) ( )]
wh
:
ere ( ) ( ) ,
B
B
N N
T n n B B
n N n N
N N
j fnTj ft j ft
T T n B B n
n N n N
j f
T
t
T
u t u t a g t nT g t nT
U f u t e dt a g t nT g t nT e dt a e G f
u
G f
G f g t e
t
dt G
ππ π
π
=− =−
∞ ∞
−− −
−∞ −∞
=− =−
∞
−
−∞
+
= = − − −
= = − − − = −
=
∑ ∑
∑ ∑∫ ∫
∫
現在先求出 的頻譜函數
2
2
2 2 ( )
1 2 1 2
2 2 ( )
1 2 1 2
( ) ( )
( ) ( ) ( ) [ ( ) ( )][ ( ) ( )]
[ ( ) ] ( ) [ ( ) ( )][ ( ): ( )]
B
B
j ft
N N
j f n m T
T T T m n
m N n N
N N
j f n m T
T m n
m N n N
f g t e dt
U f U f U f a a e G f G f G f G f
E U f E a a e G f G f G f G f
π
π
π
∞
−
−∞
−∗ ∗
=− =−
− ∗ ∗
=− =−
=
∴ = = − −
= − −
∫
∑ ∑
∑ ∑其統計平均為
2. u(t)的功率譜密度的功率譜密度的功率譜密度的功率譜密度Pu(f)
18.
18
2 2 ()
1 2 1 2
2 2 ( )
1 2 1 2
( ) ( ) ( ) [ ( ) ( )]
1 ,
[ ( ) ( )]
[ ( ) ] (:
,
) [ ( ) ( )]
,
[ )]
(
( (
1
)
)
B
B
N N
j f n m T
T T T m n
m N n N
N N
j f n m T
T m n
m N n N
m
n
U f U f U f a a e G f G f G f G f
E U f E a a e
P P
G f G f G f G f
am
a
n
P P
a
π
π
−∗ ∗
=− =−
− ∗ ∗
=− =−
−
=
=
− −
∴ = = − −
= − −
∑ ∑
∑ ∑
i
其統
以
計平均為
當 時
機率
以機率
2
2 2 2 2
2
2 2
2 2 2 2 2 2
(1 ) ,
[ ] (1 ) (1 ) (1 )
, (1 )
(1 ) ,
, (1 ) [ ] (1 ) (1 ) 2 (
(1 ),
,
)2 (1
n n n
m n m n
P P
a E a P P P P P P
P P
P P
a a P P E a a P P P P
P P
m P
P P
n
−
= = ∴ = − + − = −
−
−
= − ∴ = − + − +
−
≠
− −
i
以機率
以機率
以機率
以機率
以
時
機率
當
2 2 ( )
1 2 1 2
2
2 2 22
1 2 1 2
1 )( 1) 0
[ ( ) ] ( ) [ ( ) ( )][ ( ) ( )]
[ ( ) ]
[ ( ) ] [ ] ( ) ( ) (2 1) (1 ) ( ) ( ) , ( ) li
2 1
m
( )
, B
N N
j f n m T
T m n
m N n N
N
T
T n u
N
n N B
m n
P P P
E U f E a a e G f G f G f G f
E U f
E U f E a G f G f N P P G f G f P f
N T
π − ∗ ∗
=− =−
→∞
=−
− − =
= − −
⇒ = − = + − − =
+
=∑ ∑
∑
由以上計算可知 的統計平均值僅在 時存在
代入
即可求
2
21 2
1 2
1 2
(2 1) (1 ) ( ) ( )
( ) lim (1 ) ( ) (
, ( ) , ( ) ( ) .
( ) ) .
(2 1
, .
)
u B
N
B
uP f g t g t
N P P G f G f
P f f P P G f G f
N T
u t
P
→∞
+ − −
= = − −
+
⇒
上式表明 交變波的功
得 的功率
率譜 是連續譜 它與 和 的頻譜以及機率 有關
通常 根據連續譜可以確定隨機序
譜密
列的頻寬
度
19.
19
2
1 2
2
1 2
22
1 2 1 2
( ) ( ) ( )
( ) (1 ) ( ) ( )
( ) [ ( ) (1 ) ( )] ( )
( )
DSB PSD: ( ) ( ) ( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] (
,
,
u B
v B B B B
m
s u v B B B B B
P f f P P G f G f
P f f PG mf P G mf f mf
P f P f P f f P P G f G
s t u t v t
f f PG mf P G mf f mf
s t
δ
δ
∞
=−∞
= − −
= + − −
= + = − − + + −
= +
−
∑
i
由於 所以將下兩式相加
得到隨機序列 的功率譜密度 即
2
1 2
2 22 2
1 2 1 2
2
1
1
).
SSB PSD: ( ) 2 (1 ) ( ) ( )
(0) (1 ) (0) ( ) 2 ( ) (1 ) ( ) ( ),
where 1/ : ,
0.
( ),: )( ( )
m
s B
B B B
B B B B B
m
P f f P P G f G f
f PG P G f f PG mf P G mf f
f T T G f G
f
f
m fδ δ
∞
=−∞
∞
=
=
= − − +
+ − + + − − ≥
∑
∑
i
碼元速率 碼元寬度 持續時間 和 分別 1 2
1 2 1 2
1 2
1 2
( ) ( )
( ) ( ) ( )
( ) ( ) ( ( )
(
Fourier
) ( )
(
:
1. .
2. , , ) .
.
3 ). , ( )
u vs
g t g t
P f
g t g t G f G f
g t g t P
g t g t
P P
≠
是 和 的 變換.
結論
二進制隨機脈衝序列的功率譜 可能包含連續譜 第一項 和離散譜 第二項
連續譜總是存在的 這是因為代表數據信息的 和 波形不能完全相同 故有
譜的形狀取決於 和 的頻譜以及出現的機率
離散譜是否存在 取決於 和 的波形及其出現的
1 2
. ,
, 1/ 2 , .
( 0) ( 1)
( ) ( ) ( ) ( )
.
( )B
P
g t g t g t P
m
mf
m
fδ= − = =
= =
−
機率 一般情況下 它也總是存在的,
但對於雙極性信號 且機率 等概 時 則沒有離散分量
根據離散譜可以確定隨機序列是否有直流分量 和定時分量
3. s(t)的功率譜密度的功率譜密度的功率譜密度的功率譜密度Ps(f)
20.
20
Ex: 求求求求單極性單極性單極性單極性NRZ和和和和RZ矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率譜譜譜譜
1 2
22
1 2 1 2
2 2
( ) ( ) ( )
( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] (
: 0, , DSB PSD,
DSB PSD:
1/ 2 ,
)
( ) (1 ) ( ) (1 ) ( ) ( )
1
( )
4
s B B B B B
m
s B B B B
m
s
P f f P P G f G f f PG mf P G mf f m
g
f
P f f P P G f f P G mf f mf
t g t g
fP P f
t
δ
δ
∞
=−∞
∞
=−∞
= − − + + − −
= =
=
= − + − −
=
∑
∑
對於單極性波形 若設 將其代入下式
得隨機脈衝序列的
時 上式簡化為 2
2
2 21
( ) ( ) ( ).
4
1,
( ) 2
0, others
,
0, (0) sinc(0) 0,
:
sin
( ) sinc( ).
( )
(1) "1" ( ) ( ) N
,
RZ
B B B B
m
B
B
B B B
B
B
sB
G f f G mf f mf
T
t
g t
fT
G f T T fT
fT
Pm G T
f
g t g t
mf
m
f
δ
π
π
π
∞
=−∞
+ −
≤
=
=
= = ≠
=
=
=
∑
即
頻譜函數為
若 故頻譜 中有直流分量
當 時
若 為
若表示 碼的
不等於零的
波形 為 矩形脈
數
衝
整
2 2 2 22
( ) ( ) 0, ( ) ( )
sin1 1 1 1
( ) ( ) ( ) ( ) ( )
4 4 4 4
sinc
1
( ) sinc ( ) ( ).
4
,
4
B s B
B
s B B B B B B
m B
B
s B
BG mf n P f f f
fT
P f f G f f G mf f mf f T f
fT
T
P f fT f
T
π δ
π δ
π
δ δ
π
∞
=−∞
⇒
= = −
= + − = + =
+∑
頻譜 中離散譜為零 因而無定時分量
單極性NRZ PSD
21.
1 2
2 2
12 1 2
2 2
( ) ( ) ( )
( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] (
: 0, , DSB PSD,
DSB PSD:
1/ 2 ,
)
( ) (1 ) ( ) (1 ) ( ) ( )
1
( )
4
s B B B B B
m
s B B B B
m
s
P f f P P G f G f f PG mf P G mf f m
g
f
P f f P P G f f P G mf f mf
t g t g
fP P f
t
δ
δ
∞
=−∞
∞
=−∞
= − − + + − −
= =
=
= − + − −
=
∑
∑
對於單極性波形 若設 將其代入下式
得隨機脈衝序列的
時 上式簡化為
2
2
221
( ) ( ) ( ).
4
( ) sinc, / 2 ,
0, (0) sinc(0) / 2 0,
: ,
(2)
2 2
( )
( ) ,sinc( ) 0,
"1" ( ) ( RZ
2 2
)
B B B B
m
B B
s
B
B
B
B
B
G f f G mf f mf
T T
G f f
P f
T m
G m
g T
m G
t
T
f mf m od
g t
fd
δ
π
π
τ
∞
=−∞
+ −
= =
= = ≠
= ∈
= ≠
=
∑
即脈衝寬度若表示 碼的波形 為半占空 時 其頻譜函數為
若 故頻譜 中有直流分量
當 時 若 此時有離
矩形
散譜
脈衝
有
2 2 222
( )
( ) sinc( ) 0,
2 2
1 1
( ) ( ) (
1
( ) sinc sinc ( ).
16
) ( )
2 16 24
1
,
4
B
B
s B B B B
m
B B
s B
m
T m
G mf
P f f G f
T fT
f G mf
m
P f f mf
m
m ev n
f
e
mf
π
δ
π π
δ
∞
=−
∞
=−∞ ∞
=
=
=
∈
=
= + + −
−
⇒
∑∑
定時分量 時
若 此時無離散譜
21
單極性RZ PSD
22.
22
Ex: 求求求求雙雙雙雙極性極性極性極性NRZ和和和和RZ矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率譜譜譜譜
2 2
12 1 2
2 2
1 2: , DSB PSD( ) ( ) ( )
( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] ( )
( ) 4 (1 ) ( ) (2 1)
,
DSB PSD ( ) ( )
( )
:
1 (/ 2 ,
s B B B B B
m
s B B B B
m
s B
P f f P P G f G f f PG mf P G mf f mf
P f f P P G f f P G m
g t g t g t
f f mf
P f fP G
δ
δ
∞
=−∞
∞
=−∞
= − =
=
= − − + + − −
= − + − −
=
∑
∑
對於雙極性波形 設 將其代入下式
得隨機脈衝序列的
時 上式簡化為
2
2
2
(1) ( ) 1 NRZ , ( ) sinc ( ).
(2) ( ) 1 RZ , ( ) sinc .
4 2
) .
s B B
B B
s
g t P f T fT
T f
f
T
g t P f
π
π
=
=
若 是高度為 的 矩形脈衝 上式可寫成
若 是高度為 的半占空 矩形脈衝 則
雙極性NRZ PSD
雙極性RZ PSD
2 21
( ) sinc sinc ( )
16 2 16 2
B B
s B
m
T fT m
P f f mf
π π
δ
∞
=−∞
= + −
∑
2 1
( ) sinc ( ) ( )
4 4
B
s B
T
P f fT fπ δ= +
2
( ) sinc ( )s B BP f T fTπ=
2
( ) sinc
4 2
B B
s
T fT
P f
π
=
26
Ex: 2 orthogonalsignal in AWGN channel prob of error
https://gist.github.com/oklachumi/a54e6b9204736198e064caf57fc3b2cc
0
2
b bE R
SNR
N
B
=
sampling Bt T=
sampling Bt T=
判決器 data
output
0r
1r
( )r t
0 ( )s t
1( )s t
0
0
0
0
1
1
0
0
0
1
Tx: ( )
,
2
Rx: , ( , )
0,
2
Tx: ( )
0,
2
Rx:
,
2
b
b
b
b
b
b
s t
E N
r E
E N
r
s t
E N
r
E N
r E
均值 方差
27.
27
Ex: 2 orthogonalsignal in AWGN channel prob of error
https://gist.github.com/oklachumi/4b5567b4f369518ab5c2d8e55f579cc8
28.
28
Ex: 2 bipolarsignal in AWGN channel prob of error
0
0
0
1 0
0
1
Tx: ( )
Rx: , 0, ( , )
2
: 0 ( )
Tx: ( ) ( )
Rx: , 0,
2
: 0 ( )
b
b
b
b
s t
E N
r E n n
r s t
s t s t
E N
r E n n
r s t
= +
> ⇒
= −
= − +
< ⇒
均值 方差
判決
判決
https://gist.github.com/oklachumi/8084ab3b1c0fb3c51813645c0d2dfed4
29.
29
Ex: 2 unipolarsignal in AWGN channel prob of error
, 3 dB.單極性與正交信號性能相同 比雙極性差
https://gist.github.com/oklachumi/1190620f3f64e177d061e016d9caf605
39
7. Miller code:又又又又稱稱稱稱延遲延遲延遲延遲(delay)調製碼調製碼調製碼調製碼
編碼規則:
"1"碼用"10"或"01"表示, ex: 只要出現"1"下次就switch the state.
"0"碼有兩種情況:
• 單個"0"時, 在碼元持續時間內不出現電平躍變, 且與相鄰碼元的邊界處也不躍變,
• 連"0"時, 在兩個"0"碼的邊界處出現電平躍變, 即"00"與"11"交替.
Ex: 圖(a)是雙相碼的波形. 圖(b)為密勒碼的波形
若兩個"1"碼中間有一個"0"碼時, 密勒碼流中出現最大寬度為2Ts的波形, 即兩個碼元週期. 這一
性質可用來進行宏觀檢錯.
用雙相碼的下降沿去觸發雙穩電路, 即可輸出密勒碼.
應用: NFC coding, 氣象衛星和磁記錄, 現在也用於低速基帶數據機.
2 ST
T
( )a
( )b
t
t
Manchester code
Miller code
40.
40
clc, close all;
h=[11 0 1 0 0 1];
est_initial=1;
con=est_initial;%Set 1 -1
long=length(h);%Number of bits of the signal
n=1;%Initial state for "while" loop
ac=[];%Null matrix to code signal.
bits=[];%Null matrix to original signal.
h(long+1)=0;
while n<=long%Code to finished the length of the signal.
if h(n)==1 %If the bit is 1
bit=[ones(1,100)];
s=[con*ones(1,50) -con*ones(1,50)];
con=con*-1;%Switch state of the signal
else %If the bit is 0
bit=[zeros(1,100)];
s=[con*ones(1,100)];
if h(n+1)==0%If the next bit is 0
con=con*-1;%Switch state of the signal
end
end
ac=[ac s];%Accumulate miller code.
bits=[bits bit];%Accumulate signal
n=n+1;%Increment of the cycle
s=[];%Reset temporal matrix s.
end
subplot(2,1,1);plot(bits,'LineWidth',2);
title('input signal');
axis([0 100*(length(h)-1) -2 2])
grid on
subplot(2,1,2);plot(ac,'LineWidth',2)
title('miller code')
axis([0 100*(length(h)-1) -2 2])
grid on
https://www.mathworks.com/matlabcentral/fileexchange/19881-program-to-simulate-the-miller-code
44
Digital Modulation
信息信息信息信息bit映射到映射到映射到映射到BB signal(基帶信號基帶信號基帶信號基帶信號)也叫也叫也叫也叫modulation
數字bitbk → 映射成符號In → 再形成基帶信號s(t)
2
2
( ) ( )
, symbol
symbol period
1/ symbol rate
( ),
log bit
log
pulse shaping function
( )
n s
n
s
s
s s
n
b s
s t I g t nT
T
T
R T
I n M
M
R M R
g
s t
= −
=
= =
= ⋅
∑
時間被劃分為 的片段 每個片段被稱為一個
是第 個要發送的符號 複基帶信號 可取 個離散值
一個符號可表示為 個
為 基帶濾波控制帶外洩漏
把所有符號波形按照時間順序累加
就得到了複基帶信號
Analog modulation
Digital modulation
( )y t
()C ω
{ }na
( )d t
50
( ) ( )
( ) ( ) ( ) ( )
1
( ) ( )
2
( ) ( ) ( ) ( )
1
( ) ( )
2
n s
n
T n T s
n
j t
T T
T R
j t
d t a t nT
s t d t g t a g t nT
g t G e d
H G C G
h t H e d
ω
ω
δ
ω ω
π
ω ω ω ω
ω ω
π
∞
=−∞
∞
=−∞
∞
−∞
∞
−∞
= −
= ∗ = −
=
=
=
∑
∑
∫
∫
s(t)
[ ]0 0 0 0
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
R n s R
n
s k n s R s
n k
r t d t h t n t a h t nT n t
r kT t a h t a h k n T t n kT t
∞
=−∞
≠
= ∗ + = − +
+ = + − + + +
∑
∑
r(t) 0( )sr kT t+⊕
{ }na′
0,1,0,1 or -1,1,-1,1
對應的BB signal
gT(t): impulse response
分析前先把model建好
nR(t)是加性噪聲n(t)經過接
收濾波器後輸出的噪聲
為了確定第k個碼元 ak 的取值, 首先應
在t = kTs + t0 時刻上對r(t)進行抽樣, 以確
定r(t)在該樣點上的值.
t0: 信道和接收濾波器造成的時延.
Digital Modulation
51.
51
第一項akh(t0)是第k個接收碼元波形的抽樣值, 它是確定ak的依據.
第二項(Σ項)是除第k個碼元以外的其它碼元波形在第k個抽樣時刻上的總和(代數和), 它對當
前碼元ak的判決起著干擾的作用,所以稱之為碼間串擾值(ISI).
由於ak是以概率出現的, 故ISI通常是一個隨機變數.
第三項nR(kTB + t0)是輸出噪聲在抽樣瞬間的值, 它是一種隨機干擾, 也會影響對第k個碼元的正
確判決.
此時, 實際抽樣值不僅有本碼元的值, 還有碼間串擾值及噪聲, 故當r (kTs + t0)加到判決電路時, 對
ak取值的判決可能判對也可能判錯. 例如, 在二進制數字通信時, ak的可能取值為"0"或"1", 若判決
電路的判決門限為Vd , 則這時判決規則為:
• 當 r(kTs + t0) > Vd時, 判ak為"1"
• 當 r(kTs + t0) < Vd時, 判ak為"0".
顯然, 只有當碼間串擾值和噪聲足夠小時, 才能基本保證上述判決的正確.
[ ]0 0 0 0( ) ( ) ( ) ( )s k n s R s
n k
r kT t a h t a h k n T t n kT t
≠
+ = + − + + +∑
Digital Modulation
ISI
53
( )h t
0t0sT t+
( )h t
0t 02 sT t+0sT t+
[ ]0(ISI )n s
n k
a h k n T t
≠
= − +∑
[ ]0( ) 0n s
n k
a h k n T t
≠
− + =∑
若能使若能使若能使若能使:
, 則無則無則無則無ISI
怎麼做怎麼做怎麼做怎麼做????
做不到做不到做不到做不到 關注抽樣時刻關注抽樣時刻關注抽樣時刻關注抽樣時刻
等等等等Ts的零的零的零的零點點點點
由於an是隨機的, 要想通過各項相互抵消使碼間串擾為0是不行的.
這就需要對h(t)的波形提出要求.
若讓h[(k-n)Ts + t0] 在Ts + t0、2Ts + t0等後面碼元抽樣判決時刻上正好為0, 就能消除碼間串擾.
這就是消除碼間串擾的基本思想.
不考慮噪聲情況下如何消除不考慮噪聲情況下如何消除不考慮噪聲情況下如何消除不考慮噪聲情況下如何消除ISI
54.
54
無碼間串擾無碼間串擾無碼間串擾無碼間串擾(ISI)的時域條件的時域條件的時域條件的時域條件
Digital Modulation
1, 0
()
0,
s
k
h kT
k
=
=
為其他整數
( )
( )
(2 1) /
(2 1) /
/
2
/
1
( ) ( ) ,
2
1
( ) ( ) , 2 /
2
1
( )
2
2
1 2
( )
2
1 2
(
2
,
)
S
S
S
S
S
S
S
j t
S
j kT
S S
i T
j kT
S i T
i
S
T
j kT j ik
S
T
i S
j
S
h t H e d T
h kT H e d T
h kT H e d
i
T
i
h kT H e e
H
T
t
d
k
T
i
e
ω
ω
π ω
π
π ω π
π
ω
ω ω
π
ω ω π
π
ω ω
π
π
ω ω
π
ω ω
π
π
ω
π
∞
−∞
∞
−∞
+
−
′
−
′
=
=
=
′ = −
′ ′= +
′= +
=∫
∫
∑∫
∑∫
時 有
每段長為
( )
/
/
/
/
Fourier , ( ) 2 /
( )
( )
2
.
,
Fourier :
Nyqui .
( )
st
,
.
S
S
S
S
S
S
S
T
kT
T
i
S
jn T
n
n
T
jn TS
n S
T
d
F T
F f e
T
f F d k
H
e h T
π
π
ω
π ω
π
ω
ω π
ω
ω ω
π
ω
−
−
−
′
=
= ⇒
∑∫
∑
∫ 與 對照
得
由 級數可知 若 是週期為 的頻率函數
則可用指數型 級數表示
第一準則
基帶系統的總特性 凡是能符合此要求的
均能消除碼
頻域條 又稱
間串擾
件
無碼間串擾無碼間串擾無碼間串擾無碼間串擾(ISI)的的的的頻頻頻頻域條件域條件域條件域條件
2
( ) ,S
i S S
i
H T
T T
π π
ω ω+ = ≤∑
抽樣脈衝
分段分段分段分段
積分積分積分積分
求和求和求和求和
只要基帶傳輸系統的衝激響應波形h(t)僅在本碼元的抽樣時刻
上有最大值, 並在其他碼元的抽樣時刻上均為0, 則可消除碼間
串擾.
也就是說, 若對h(t)在時刻t = kTs(這裡假設信道和接收濾波器所
造成的延遲t0 = 0)抽樣, 則有上式的時域條件!!
55.
55
2
( ) ,S
iS S
i
H T
T T
π π
ω ω+ = ≤∑
Ts Ts
2
Ts
3
i=1(d)
Ts
H( )
Ts
3
- Ts
2
-
Ts
-
Ts Ts
2
Ts
3
(a)
檢驗或設計H(ω)能否消除ISI的理論依據
物理物理物理物理含義含義含義含義:
切割切割切割切割, 平移平移平移平移, 對折對折對折對折, 疊加成理想疊加成理想疊加成理想疊加成理想LPF
以以以以Rs = 1/Ts的速率傳輸的速率傳輸的速率傳輸的速率傳輸
則無則無則無則無ISI !!
這一過程可以這一過程可以這一過程可以這一過程可以歸歸歸歸納納納納為為為為: 一個實際的一個實際的一個實際的一個實際的H(ωωωω)特性特性特性特性,
若若若若能等效成一個理想能等效成一個理想能等效成一個理想能等效成一個理想(矩形矩形矩形矩形)低通濾波器低通濾波器低通濾波器低通濾波器, 則可則可則可則可
實現無碼間串擾實現無碼間串擾實現無碼間串擾實現無碼間串擾.
56.
56
Digital Modulation
( )Hω
BT
π−
BT
π0 ω
,
( )
0,
B
B
B
T
T
H
T
π
ω
ω
π
ω
≤
=
>
sin
( ) sinc( / )B
B
B
t
T
h t t T
t
T
π
π
π
= =
FT
若輸入資料以RB = 1/TB波特的速率進行傳輸, 則在抽樣時刻上不存在碼間串擾.
• 若以高於1/TB波特的碼元速率傳送時, 將存在碼間串擾.
• 通常將此頻寬B = 1/(2TB)稱為Nyquist頻寬頻寬頻寬頻寬fN, 將RB稱為Nyquist速率速率速率速率.
此基帶系統所能提供的最高頻帶利用率η為 RB/B = 2 [Baud/Hz], 這種特性陡峭在物理上是無法實現的
• 並且h(t)的振盪衰減慢, 使之對定時精度要求很高, 故不能實用。
How to solve ? 在fN奇對稱波形進行"圓滑"+"滾降"
Nyquist最窄頻寬 無ISI最高Baud Nyquist rate
(無ISI BB最高頻帶利用率)
無無無無ISI設計設計設計設計
57.
57
Digital Modulation
raised-cosine filterminimize ISI
(1 )
, 0
(1 ) (1 )
( ) [1 sin ( )],
2 2
(1 )
0,
S
S
S S
S S S
S
T
T
T T
H
T T T
T
α π
ω
π α π α π
ω ω ω
α
α π
ω
−
≤ <
− +
= + − ≤ <
+
≥
( ) 2 2 2
sin / cos /
/ 1 4 /
S S
S S
t T t T
h t
t T t T
π απ
π α
= ⋅
−
FT
/ , 0Nf fα α∆≡ =理想低通
引入滾降係數
描述滾降程度
( )0 ~1
1
2
N
B N
B
f
f
R f
T
α ∆
=
= =
(1 )N NB f f fα∆= + = +
無無無無ISI設計設計設計設計
58.
58
,
:
:
0 ,
( )
(1)
2 2
[Baud/Hz]
(1 ) (1 )
( )
2
1 cos
1 , ,
,
2 2
( )
:
2
0,
(
N N
NB
N
s s
s
s
B f f f
fR
h t
B f
T T
T
H
t
H
T
h
α
η
α α
ω
ω π
ω
ω
π
ω
α
α
α
∆= + = +
= = =
+ +
=
+ ≤
=
=
>
滾降係數 越大 的拖尾衰減越快
滾降使頻寬增大為
餘弦滾降系統的最高頻帶利用率為
當 時 即為前面所述的理想低通系統
當 時 即為升余弦頻譜特性 這時 可表示為:
單位衝激響應為 2 2
sin cos
)
1 4
s s
s s
t T t T
t T t T
π π
π
= ⋅
−
59.
59
由上式可知, α =1的升余弦滾降特性的h(t)滿足抽樣值上無串擾的傳輸條件, 且各抽樣值之間又增加了一
個零點, 而且它的尾部衰減較快(與t2成反比), 這有利於減小碼間串擾和位定時誤差的影響.
但α = 1這種系統所占頻帶最寬, 是理想低通系統的2倍, 因而頻帶利用率為1 Baud/Hz, 是二進位基帶系統
最高利用率的一半.
在以上討論中並沒有涉及H(ω)的相移特性. 實際上它的相移特性一般不為零, 故需要加以考慮. 在推導
Nyquist第一準則公式的過程中, 我們並沒有指定H(ω)是實函數, so, 該公式對於一般特性的H(ω)均適用.
2 2
0 ,
1 , ,
:
2
1 cos ,
2 2
( ) ( )
2
0,
sin cos
( )
1 4
s s
s
s
s s
s s
T T
T
H
T
t T t T
h t
t T t T
H
ω π
ω
ω ω
π
ω
π π
π
α
α
+ ≤
=
>
=
−
=
=
⋅
當 時 即為前面所述的理想低通系統.
當 時 即為升余弦頻譜特性 這時 可表示為:
單位衝激響應為
60.
60
(1 )
, 0
(1) (1 )
( ) [1 sin ( )],
2 2
(1 )
0,
S
S
S S
S S S
S
T
T
T T
H
T T T
T
α π
ω
π α π α π
ω ω ω
α
α π
ω
−
≤ <
− +
= + − ≤ <
+
≥
( ) 2 2 2
sin / cos /
/ 1 4 /
S S
S S
t T t T
h t
t T t T
π απ
π α
= ⋅
−
FT
/ Nf fα ∆≡
Digital Modulation
root-raised-cosine (RRC) filter
實際應用中1個在Tx, 1個在Rx, raised-cosine RRC RRC= ⋅
√ ̄
√ ̄ ̄ ̄ ̄ ̄ ̄
余弦滾降濾波器特點
1. 特性易實現
2. Response曲線拖尾收斂快, 擺幅較小
BUT代價
1. BW↑
2. 頻帶利用率η↓
無無無無ISI設計設計設計設計
67
在無在無在無在無ISI條件下條件下條件下條件下, 信道信道信道信道噪噪噪噪聲聲聲聲n(t)引起引起引起引起的的的的碼碼碼碼誤率誤率誤率誤率Pe
20
0
22 0
2
()
( )
( ) ( ) ( )
2
( )
2
, 0, / 2.
, 0 ,
:
( ) :
( 0, ,)
1
( )
2
n R
n R
n
V
n
R
n
R
n t n
n t
P f
n
P f G f
n
G f d f
f V e
n t
σ
σ
πσ
∞
−∞
−
=
=
=
∫
加性高斯白噪聲 均值為 雙邊功率譜密度為
因為接收濾波器是一個線性網路 故判決電路輸入噪聲 也是均值為 的平穩高斯噪聲
功率譜密度 為
方差 噪聲平均功率 為
是均值為 方差為 的高斯噪聲 因此它的瞬時值的統計特性可用下述一維機率密度函數表示
2
2
2
:, ( )n
R BV n kTσ
噪聲的瞬時取值
68.
68
二二二二進進進進制制制制雙雙雙雙極性基帶系統極性基帶系統極性基帶系統極性基帶系統
2
2
2
1
(
(
"1" "
),
( )( ) ( )
( ),
1
( ) ,
2
1 (
( ) ( ) ex
0"), ,
"1"
:
"0"
"1" ,
2
: p
n
R B
B
R B
V
n
n
R B
A
A n kT
x kT
A n kT
f V e
x
f x
A
x t
A n kT
σ
πσ
πσ
−
+
+
−
+
=
− +
=
−
=+
設二進制雙極性信號在抽樣時刻的電平取值為 或 分別對應信碼 或 則在一個碼元持續時間內
抽樣判決器輸入端的混和 信號 噪聲 波形 在抽樣時刻的取值為
根據
當發送 時 的一維機率密度函數為
2
2
2
0 2
)
2
1
"0" , :
, :
( )
( ) ( ) exp
22
"1" ( )
"1"
"0" ( )
"0" ( )
"0"
"1" (
n
nn
R B
d
d
d
d
d
A n kT
A
x A
f x
x V
x V
x V
V
x V
A A
σ
σπσ
−
− +
− =
>
+
+
≤
>
−
≤
當發送 時 的一維機率密度函數為
上兩式的曲線如下;
在 到 之間選擇一個適當的電平 作為判決門限 根據判決規則將會
當 判為 碼 正確
對 碼
當 判為 碼 錯誤
當 判為 碼 正確
對 碼
當
出現以下幾種情況
判為 碼 錯誤
, :
"1" "0" & "0" "1" .
.
)
可見 有兩種差錯形式
發送的 碼被判為 碼 發送的 碼被判為 碼
下面分別計算這兩種差錯機率
69.
69
2
1 2
2
0 2
1( ) 1 1
(0 /1) ( ) ( ) exp
"1" "0" (0 /1) :
"0" "1" (1
2 2 22 2
1 ( ) 1 1
(1/ 0) (
/ 0) :
) ( ) exp
2 2 22
d d
d d
V V
d
d
nn n
d
d V V
nn
V Ax A
P P x V f x dx dx erf
Vx A
P P x V f x dx dx
P
e
P
rf
σπσ σ
σπσ
−∞ −∞
∞ ∞
−− −
= < = = = +
+− +
= > = = = −
∫ ∫
∫ ∫
i
i
發 錯判為 的機率 為
發 錯判為 的機率 為
2 n
A
σ
它們分別如下圖中的陰影部分
70.
70
2
2
(1) (0 /1)(0) (1/ 0)
"1" (1), "0" (0), :
, ,
, , , ,
,
(0 /1) (1/ 0)
(1) (0)
(1), (0) , ,
n d
d
e
n
P P
A V
P P P P P
P P
P
P A V
P
P
σ
σ
= +
i 假設信源發送 碼的機率為 發送 碼的機率為 則二進制基帶傳輸系統的總碼誤率為
將上面求出的 和 代入上式 可以看出
得碼誤率與發送機率 信號的峰值 噪聲功率 以及判決門限電平 有關
因此 在 給定時 碼誤率最終由 和判決門限 決
[ ]
2
2
.
, , , :
:
1
0
(0)
ln .
2 (1)
(1) (0) 0,
1 1 1
(0 /1) (1/ 0) 1 .
2 2
/ 2,
22 2
:
,
e
d
n
d
d
n
e
n n
P
V
P
V
A P
P P V
A A
P P P erf erfc
A
σ
σ σ
σ
∗
∗
∂
=
∂
⇒ =
= = =
= + = − =
i
定
在 一定條件下 可以找到一個使碼誤率最小的判決門限電平 稱為最佳門限電平
可求得最佳門限電平
若 則有 基帶傳輸系統總誤碼率為
由上式可見 在發 , ,
, .
/ , .
n
n eP
A
A
σ
σ ↑ ↓
送機率相等 且在最佳門限電平下
雙極性基帶系統的總碼誤率僅依賴於信號峰值 與噪聲方均根值 的比值 而與採用什麼樣的信號形式無關
且比值
71.
71
二二二二進制進制進制進制單單單單極性極性極性極性基帶系統基帶系統基帶系統基帶系統
[ ]
0
2
( )
()
(0)
ln .
2 (1)
1 1
(1) (0) / 2, (0
, 0 "1" "0" ,
0 .
:
1/ 2, : /1) (1/ 0) .
2 2 2 2
2
1
2 2
e
n
n
d
d e
n
A P
V
A P
A
P P V A P P P erfc
A
f x
A
P e c
A
rf
σ
σ
σ
∗
∗
=
= +
= = = = + =
+
−
i
對於單極性信號 若設它在抽樣時刻的電平取值為 或 分別對應信碼 或
則只需將下圖中 曲線的分佈中心由 移到 即可
則最佳門限電平
若 則有 基帶傳輸系統總誤碼率為
,
1. / , ,
.
.
2. , 0, , , .
/ 2,
1
.
2 2
e
n
nA
A
A
P erfc
σ
σ
=
i 比較雙極性和單極性基帶系統碼誤率可見
當比值 一定時 雙極性基帶系統的誤碼率比單極性的低 抗噪聲性能好
在等概條件下 雙極性的最佳判決門限電平為 與信號幅度無關 因而不隨信道特性變化而變 故能保持最佳狀態
而單極性的最佳判決門限電平為 它易受信道
單極
特
性
雙極性
性變化的 , .
3. , .
影響 從而導致碼誤率增大
因此 雙極性基帶系統比單極性基帶系統應用更為廣泛
80
部分響應部分響應部分響應部分響應系統系統系統系統→ 提高頻譜提高頻譜提高頻譜提高頻譜利用率利用率利用率利用率
人為地在碼元的抽樣時刻引入碼間串擾, 並在接收端判決前加以消除,從而可以達到改善頻譜
特性, 壓縮傳輸頻帶, 使頻帶利用率提高到理論最大值, 並加速傳輸波形尾巴的衰減和降低對定
時精度要求的目的. 通常把這種波形叫部分響應波形.
利用部分響應波形傳輸的基帶系統稱為部分響應系統.
第第第第I類類類類部分響應部分響應部分響應部分響應波形波形波形波形:
觀察下圖所示的sin x/x波形, 我們發現相距一個碼元間隔的兩個sin x/x波形的"拖尾"剛好正負相
反, 利用這樣的波形組合肯定可以構成"拖尾"衰減很快的脈衝波形.
根據這一思路, 我們可用兩個間隔為一個碼元長度TB的sin x/x的合成波形來代替sin x/x , 如下圖
所示
sin
( ) sinc( / )B
B
B
t
T
h t t T
t
T
π
π
π
= =
81.
81
2 2
sin sin
22 cos /4
1 4
2
)
/
2
(
B B
B B B
B B B
B B
T T
t t
T T t T
T T t T
t
t
T
g
t
T
π π
π
π π π
+ −
= + =
− + −
sin
2
2
B
B
B
B
T
t
T
T
t
T
π
π
+
+
sin
2
2
B
B
B
B
T
t
T
T
t
T
π
π
−
−
1. 由上式可見, g(t)的"拖尾"幅度隨t2下降, 這說明它比 sin x/x波形收斂快, 衰減大. 這是因為, 相距
一個碼元間隔的兩個sin x/x波形的"拖尾"正負相反而相互抵消, 使得合成波形的"拖尾"衰減速
度加快了.
2. 此外, 由圖還可以看出, g(t)除了在相鄰的取樣時刻t = ±TB/2處, g(t) = 1外, 其餘的取樣時刻上,
g(t)具有等間隔TB的零點.
第第第第I類部分類部分類部分類部分響應響應響應響應時域時域時域時域
82.
82
g(t)的頻譜函數: 對 進行FT,得到2 2
cos /4
( )
1 4 /
B
B
t T
g t
t T
π
π
=
−
( )
2 cos ,
2
0,
B
B
B
B
T
T
T
G
T
ω π
ω
ω
π
ω
≤
=
>
頻寬為B = 1/2TB (Hz) , 與理想矩形濾波器的相同.
頻帶利用率為
達到了基帶系統在傳輸二進制序列時的理論極限值.
1 1
/ / 2 (Baud/Hz)
2
B
B B
R B
T T
η = = =
第第第第I類部分類部分類部分類部分響應響應響應響應頻域頻域頻域頻域
抽樣脈衝
如果用上述部分響應波形作為傳送信號的波形, 且發送
碼元間隔為TB, 則在抽樣時刻上僅發生前一碼元對本碼
元抽樣值的干擾, 而與其他碼元不發生串擾, 見右圖.
表面上看, 由於前後碼元的串擾很大, 似乎無法按1/TB的
速率進行傳送. 但由於這種"串擾"是確定的, 在接收端可
以消除掉, 故仍可按1/TB傳輸速率傳送碼元.
83.
83
1 1
1
, ,1 1 "1" "0" .
, , :
or
wher
{ }
e ( .
, 2,
( )
( ) ( )
)
) ,( 0, 2
k k
k k
k k k k k k
k k
a a
a g t k C
C a a a C a
a a k
g t
− −
−
+ −
= + = −
− +
i
i
例如 設輸入的二進制碼元序列為 並設 的取值為 及 對應於 及
這樣 當發送碼元 時 接收波形 在相應時刻上 第 個時刻上 的抽樣值 由下式確定
是 的前一碼元在第 個時刻上的抽樣值 即串擾值
由於串擾值和信碼抽樣值相等 因此 的抽樣值將有 三種取值 即成為
1
1
.
, , .
:
, 2 Baud/Hz .
BUT!!
:
, ,
,
( )
{ }
k k k
k k k
k
k
a C a
a C a
C
a
−
−
偽三進制序列
如果前一碼元 已經接收判定 則接收端可根據收到的 由上式得到 的取值
存在的問題
從上面例子可以看到 實際中確實還能夠找到頻帶利用率高 達到 和尾巴衰減大收斂也快的傳送波形
差錯傳播問題
因為 的恢復不僅僅由 來確定 而是必須參考前一碼元 的判決結果
如果 序列中某個抽樣值因干擾而發生差錯
不但會造成當前恢復的 值錯誤
1 2
,
, , .k ka a+ +而且還會影響到以後所有的 的正確判決 出現一連串的錯誤 這一現象叫差錯傳播.
84.
84
由上例可見, 自接收端{C’k}出現錯誤錯誤錯誤錯誤之後, 接收端恢復出來的{a’k}全部是錯誤的.
此外,在接收端恢復{a’k}時還必須有正確的起始值正確的起始值正確的起始值正確的起始值(+1), 否則, 即使沒有傳輸差錯也不可能得到
正確的{a’k}序列.
產生差錯傳播的原因: 因為在g(t)的形成過程中, 首先要形成相鄰碼元的串擾, 然後再經過響應
網路形成所需要的波形. 所以, 在有控制地引入碼間串擾的過程中, 使原本互相獨立的碼元變
成了相關碼元. 也正是碼元之間的這種相關性導致了接收判決的差錯傳播. 這種串擾所對應的
運算稱為相關運算, 所以將式 Ck = ak + ak-1 稱為相關編碼相關編碼相關編碼相關編碼.
可見, 相關編碼是為了得到預期的部分響應信號頻譜所必需的相關編碼是為了得到預期的部分響應信號頻譜所必需的相關編碼是為了得到預期的部分響應信號頻譜所必需的相關編碼是為了得到預期的部分響應信號頻譜所必需的, 但卻帶來了差錯傳播問題.
1k k kC a a −= +
1k k ka C a −
′ ′ ′= −
2 2
sin sin
2 2 cos /4
1 4
2
)
/
2
(
B B
B B B
B B B
B B
T T
t t
T T t T
T T t T
t
t
T
g
t
T
π π
π
π π π
+ −
= + =
− + −
85.
85
解決差錯傳播問題的途徑解決差錯傳播問題的途徑解決差錯傳播問題的途徑解決差錯傳播問題的途徑如下如下如下如下:
1 1
1
mod2 1mod2
: , .
( ) , i.e. . 2 .
: , ( ).
2 : [
{ }
2 [ ] ]
k k k k k k k k
k k k k
k k k k k
a b b a b a b b
b C b b
C b b b b
− −
−
−
⇒ = ⊕ = ⊕ ⊕
= +
⇒ = + = ⊕
i
i
i
預編碼 為了避免因相關編碼而引起的差錯傳播問題 可以在發送端相關編碼之前進行預編碼
其實就是把輸入信碼 變成差分碼 為模 加
相關編碼 把預編碼後的 作為發送濾波器的輸入碼元序列 得到 算術加
模 判決 若對上式進行模 處理 1 mod2
1
, i.e. [ ] .
2 , so .
, .
, " - - 2 " .
k k k
k k k
a a C
C a a
−
−
= =
對接收的 作模 處理後便直接得到了 不需要預先知道 不存在錯誤傳播現象
這是因為 預編碼後的信號各抽樣值之間解除了相關性
因此 整個上述處理過程可概括為 預編碼 相關編碼 模 判決 過程
Ex: ak和bk為二進制雙極性碼, 其取值為+1及-1(對應於"1"及"0")
ak 1 0 1 1 0 0 0 1 0 1 1
bk-1 0 1 1 0 1 1 1 1 0 0 1
bk 1 1 0 1 1 1 1 0 0 1 0
Ck 0 +2 0 0 +2 +2 +2 0 –2 0 0
↓
Ck′ 0 +2 0 0 +2 +2 +2 0 0 0 0
ak′ 1 0 1 1 0 0 0 1 1 1 1
1
2, 0
0,
:
1
k k kC b b −
±
=
= +判決規則
判
判
此例說明, 由當前值Ck可直接得到當前的ak , 錯誤不會傳播下去, 而是局限在受干擾碼元本身位置.
錯誤
87
部分響應的一般形式部分響應的一般形式部分響應的一般形式部分響應的一般形式
[ ]
[ ]
12
1 2
1 2
sin / , :
, ,...,
sin sin ( ) sin ( 1)
( ) ...
( )
, , .
, 1, 1, 0 ,
( 1
)
.
)
(
B
B B
N
B B B
B B
N
B B B
t t t N
g t R R R
t t t N
R R R
N T x x
T T
T T T
T T
T T T
R R I
g t
π π π
π π π
− − −
=
= + + +
− −
=
−
部分響應波形的一般形式可以是 個相繼間隔 的波形 之和 其運算式為
式中 為加權係數 其取值為正負整數和零
例如 當取 其餘係數等於 時 就是前面所述的第 類部分響應波形
的頻
( 1)
1
,
( ) ( ) (: so, / , /
, 1,2...
)
0,
( , ,) , .
.
, ,} }{ {
BT
B
B
B B
B
m
N
j m
m
m
kk k
T
T
T T
R
T
R m N
a
e
G G
C RC
ω
π
π
ω π
ω
ω
π
ω
− −
=
≤
=
>
−
=
=
∑
i
i
i
譜函數為 僅在 範圍內存在.
顯然 不同 將有不同類別的的部分響應信號 相應地有不同的相關編碼方式
相關編碼是為了得到預期的部分響應信號頻譜所必需的
若設輸入數據序列為 相應的相關編碼電平為 則有 1 2 1 ( 1)
1 2 1 ( 1)
, depend on . .
" " ,
...
" - - 2 "
1. : ... (mod )
P.S.
k k m k k
k
k
k k N k N
k k k N k N
a R a
C a L R C a
R a
a Rb R b R ba L
a
− − −
− − −
+ + +
= + + +⇒
i
由此看出 的電平數將 的進制數 及 的取值 且一般 的電平數將要超過 的進制數
為了避免因相關編碼而引起的 差錯傳播 現象 一般要經過類似於前面的 預編碼 相關編碼 模 判決 過程.
先對 進行預編碼
式中 和
1 2 1 ( 1)
mod
...
, " " " ".
2. :
3. ,
,
)
]
.
(
,
[
k
k
k k
k k
N
k
k
N
k
k
L
k
b L L
b
C L a C
C L
C Rb R b R
a
b− − −
+
= +
=
+ +⇒
⇒
已假設為 進制 所以式中 為 模 相加
將預編碼後的 進行相關編碼
再對 作模 處理 得到
此時不存在錯誤傳播問題 且接收端的解碼十分簡單 只需直接對 模 判決即可得
算術加
92
Summery
部分部分部分部分響應技術響應技術響應技術響應技術 → 提高頻譜利用率提高頻譜利用率提高頻譜利用率提高頻譜利用率
單個sinx/x波形:拖尾收斂慢
2個相距TB sinx/x波形相加: 拖尾衰減快
( ) 2 2
sin ( ) sin ( )
2 2 cos /4
1 4 /( ) ( )
2 2
B B
B B B
B B B
B B
T T
t t
T T t T
T T t Tt t
T
g t
T
π π
π
π π π
+ −
= + =
− + −
sin ( )
2
( )
2
B
B
B
B
T
t
T
T
t
T
π
π
+
+
sin ( )
2
( )
2
B
B
B
B
T
t
T
T
t
T
π
π
−
−
2 cos ,
2
( )
0,
B
S
B
B
T
T
T
G
T
ω π
ω
ω
π
ω
≤
=
>
FT
1
2
1 1
/ / 2 (B/
Nyqui
Hz
2
s
)
t
B
B
B B
B
T
R B
T T
η
=
= = =
頻寬
• 若g(t)為傳送信號的波形且發送碼元的間隔為TB
• 則本碼元的抽樣值僅受前一碼元相同幅值的串擾
95
:
( ) () ( ) ( ) Nyquist
2
ISI : ( ) , , ISI .
( ) ( ), whe
,
re ,( )
T R
B
i B B
T n B
n
n
H G C G
i
H T
T T
h t C t n
pf
C HT
ω ω ω ω
π π
ω ω
δ ω
∞
=−∞
=
+ = ≤
= −
∑
∑
當數字基帶傳輸系統的總特性 不滿足 第一準則
無 的頻域條件 就會
如果在接收濾波器和抽樣判決器之間插入一個橫向濾波器的可調濾波器 其衝激響應為
完全依賴於 理論上就可消除抽樣
產生有 的響應
時刻上
波形
的碼間串
2
( ) ( ) ( ) ( ), (
ISI.
:
, )
( ) ( )
B
i B B
i
T H H H T
T T
pf
T
T H
π π
ω ω ω ω ω ω
ω ω
′ ′= + = ≤∑
擾
設插入濾波器的頻率特性為 則當 滿足
則包括 在內的總特性 將能消除碼間串擾.
時域均衡原理時域均衡原理時域均衡原理時域均衡原理
96.
96
( ) (), where ( )
2
( ) ( ) ( ) ( ), ( )
: ,
, ISI.
( ) ( )
:
,
T n B
n
B
n
i B B
pf
C H
pf
h t C t nT
i
T H H H T
T
T T
T
H
δ ω
π π
ω ω ω ω ω ω
ω ω
∞
=−∞
= −
′ ′=
′
+ = ≤
∑
∑
如果在接收濾波器和抽樣判決器之間插入一個橫向濾波器的可調濾波器 其衝激響應為
完全依賴於 理論上就可消除抽樣時刻上的碼間串擾
設插入濾波器的頻率特性為 則當 滿足
則包括 在內的總特性 將能消除碼間串擾.
將
2 2 2
( ) ( ) ( ) ( )
/ , ( , ,
( ) ( )
2
( ) 2 ( ) ( ), )
(
( ) ,
:
I
)
2
)
SI
(
B B
i iB B
B
B
i B
B B B
B
B i
i i i
T H H H T H T T
T T
T
T
i
T T T
i
T T T
T
TH
T
T T i
T
π π π π π
ω ω ω ω ω ω ω ω
π
ω π ω ω
ω
π
ω
π
ω
ω
ω
′ ′= + = ≤ ⇒ + +
= ≤
+
= ≤
+ = ∑
∑ ∑
∑
如果 是以 為週期的週期函數 即 則 與 無關 可拿到 外面 於是有
即消除碼間串擾 的條件成立.
既然 是按上式延
代入
展的週期為
22 (
2 ( ) ( )
where ( ) or
2
( )
/ , Fourier :
, Fourier ( )
Fouri
)
er ,
B
B
BBB
B
B
B
jn T
jnT
B n
n
jn T TB B
n
T
TB
n n
T
jnT
i B
n
n
T
H
T T C e
T
C T
T T
C e de d C
T C
i
H
T
e
ω
π
ω
π
ω
π
ω
π ω
ππ ω
π ω ω
ω ωω
π
ω
∞
−
=−∞
−−
∞
−
=−∞
=
=
+
= ∴
=
∑
∫
∑
∫
∑
的週期函數 則 可用 級數來表示
由左式看出 係數 由 決定.
而對 求 反變換 則可求得其單位衝激響
1
( )
1
[ ]
:
( ) )
2
( .BjnT j t
n
n
T n B
n
h t T C e ne t Td CF ω ω
ω ω
π
δ−
−∞
−
∞
−
= = = −∑∫ ∑
應為
97.
97
1
( ) 2/ , ( ) Fourier : ( )
( ) Fourier , :
( ) [ ( )] ( ).
B
B
jnT
B n
n
jnT
n
n
T n B
n
T T T T C e
T C e
h t F T C t nT
ω
ω
ω π ω ω
ω
ω δ
∞
−
=−∞
∞
−
=−∞
−
=
=
= = −
∑
∑
∑
為週期 的週期函數 則 可用 級數來表示
對 求 反變換 則可求得其單位衝激響應為
由由由由hT(t)構造出均衡器的構造出均衡器的構造出均衡器的構造出均衡器的結構結構結構結構—橫向濾波器橫向濾波器橫向濾波器橫向濾波器
來自接收濾波器
延遲單元
抽頭係數
去抽樣判決
橫向濾波器組成橫向濾波器組成橫向濾波器組成橫向濾波器組成
該網路是由無限多的按橫向排列的遲延單元TB和抽頭加權係數Cn 組成的, 因此稱為橫向濾波器橫向濾波器橫向濾波器橫向濾波器.
它的功能是利用無限多個響應波形之和, 將接收濾波器輸出端抽樣時刻上有ISI的響應波形變換成抽樣時刻
上無ISI的響應波形.
由于橫向濾波器的均衡原理是建立在響應波形上的, 故把這種均衡稱為時域均衡.
1
( ) 2 / , ( )
: ( ) [ ( )] ( ).
BjnT
B n
n
T n B
n
T T T C e
h t F T C t nT
ω
ω π ω
ω δ
∞
−
=−∞
−
=
= = −
∑
∑
為週期 的週期函數
其單位衝激響應為
98.
98
橫向濾波器特性橫向濾波器特性橫向濾波器特性橫向濾波器特性
橫向濾波器的特性將取決於各抽頭係數Cn.
如果Cn是可調整的, 則圖中所示的濾波器是通用的; 特別當Cn可自動調整時,則它能夠適應信道特性的變
化, 可以動態校正系統的時間響應.
理論上, 無限長的橫向濾波器可以完全消除抽樣時刻上的碼間串擾, 但實際中是不可實現的. 因為, 不僅均
衡器的長度受限制, 並且係數Cn的調整準確度也受到限制.
如果Cn的調整準確度得不到保證, 即使增加長度也不會獲得顯著的效果. 因此, 有必要進一步討論有限長
橫向濾波器的抽頭增益調整問題.
1
( ) 2 / , ( )
: ( ) [ ( )] ( ).
BjnT
B n
n
T n B
n
T T T C e
h t F T C t nT
ω
ω π ω
ω δ
∞
−
=−∞
−
=
= = −
∑
∑
為週期 的週期函數
其單位衝激響應為
99.
99
有限長有限長有限長有限長橫向橫向橫向橫向濾波器的數學表示式濾波器的數學表示式濾波器的數學表示式濾波器的數學表示式
2 1 ,( ) , ,
, ,
( ) ( ) ( )
( ), ( ) ( )
( ) (
( )
) ( ) ( )
( ) ( )
. )
, (
(
N
i B
i N
N
i B
i N
BB i B B
N a e t
x t x t b
e t C t iT
y t x t e t C x t iT
y t c
y kT C x kT iTt kT
δ
=−
=−
= −+
= ∗ = −
= −=
∑
∑
設一個具有 個抽頭的橫向濾波器 如下圖 所示 其單位衝激響應為 則
設它的輸入為 是被均衡的對象 並設它沒有附加噪聲 如下圖 所示 則均衡後的輸出波形 為
在抽樣時刻 設系統無時延 上 有 ) [( ) ]
.
N N
i B
i N i N
N
k i k i
i N
C x k i T
y C x
=− =−
−
=−
= −
⇒ =
∑ ∑
∑將其簡寫為
來自接收濾波器
去判決電路
2 1N + 個抽頭橫向濾波器
( )x t輸入 ( )y t輸出
100.
100
0 .
" ",
"
, 2 1 .
"
.
( , ,
) .
)
( 0
k
i k
k
k i
N
k i
i
k i
N
k i
k
i
y y
C y
k y N C x
x
k
x
y
t
y
C x
−
−
−
=−
⇒ =
=
+
∑
除 以外的所有 都屬於波形失真引起的
將其簡寫為
上式說明 均衡器在第 個抽
碼間串擾
調整 使 指定 的 等於零是容易辦到的
但同時
樣時刻上得到的樣值 將由 個 與 乘積之和來確定
其中
當輸入波形 給定 即各種可能的 確定
要求 所有 的 除 外 都等於零卻是一件
時 過
很難的事
通
2 1N + 個抽頭橫向濾波器
( )x t輸入 ( )y t輸出
101.
101
Ex: 設有設有設有設有一個三抽頭的橫向濾波器一個三抽頭的橫向濾波器一個三抽頭的橫向濾波器一個三抽頭的橫向濾波器, 其其其其C-1= -1/4, C0 = 1, C+1 = -1/2; 均均均均衡器輸入衡器輸入衡器輸入衡器輸入x(t)在各抽樣點上的取在各抽樣點上的取在各抽樣點上的取在各抽樣點上的取
值分別為值分別為值分別為值分別為: x-1 = 1/4, x0 = 1, x+1 = 1/2, 其餘都為零其餘都為零其餘都為零其餘都為零. 試試試試求均衡器輸出求均衡器輸出求均衡器輸出求均衡器輸出y(t)在各抽樣點上的值在各抽樣點上的值在各抽樣點上的值在各抽樣點上的值.
1
1
1
0 1 1 0 0 1 1
1
1
1 1 1 2 0 1 1 0
1
1
1 1 1 0 0 1 1
0
2
1
2 2
0 ,
1 ,
1 ,
3
4
0
0
1
.
,
1
, ,
4 16
N
k i k i k i k i
i N i
i i
i
i i
i
i i
i
y C x y C x
y C x C x C x C x
y C x C x C x C x
y C x C x C x C x
y
k
y
k
k
y
− −
=− =−
− − −
=−
+ − −
=−
− − − − − −
=−
+ −
= ⇒ =
= = + + =
= = + + =
= = + + =
− −
=
=
=
=
= −
∑ ∑
∑
∑
∑
當 時 可得
當 時 可得
當 時 可得
其餘均為零
由此例可見 除 外 1 1 2 2, , .
,
, ?
, .
i
y y y y
C
− −均衡使 及 為零 但 及 不為零
這說明 利用有限長的橫向濾波器減小碼間
如何確定和調整抽
串擾是可能的 但完全消除是不可能的
那 頭係數 獲得最佳的均衡效果呢
102.
102
均衡準則與實現均衡準則與實現均衡準則與實現均衡準則與實現: 通常採用峰值失真和均方失真來通常採用峰值失真和均方失真來通常採用峰值失真和均方失真來通常採用峰值失真和均方失真來衡量衡量衡量衡量
0
0
2
2
0
0
1. :
,0 .
,
. , 0.
. ,
( ) .
,
1
1
2. :
.
.
, i
k
k
k
D
C
D y
y
e
k
y
y
y
a D
b D
D
∞
=−∞
≠
=
=
=
=
∑峰值失真定義
式中 除 以外的各值的絕對值之和反映了碼間串擾的最大值
是有用信號樣值 所以
對於完全消除碼
峰值失真 是碼間串擾最大可能值 峰值 與有用信號樣值之比
以峰值失
間干擾的均衡器而言 應有
對於碼間干擾不
真
為零的
均方
為準則調整抽頭係
失真定義
場合 希望 越小越好
因此 若 數 時 應使 最小
2
0
0
.
, ,
, .
P.S. .
, ,
, ( 0) ( ).
k
k
k
t C
∞
=−∞
≠
=
∑
物理意義與峰值失真相似
以最小峰值失真為準則 或以最小均方失真為準則來確定或調整均衡器的抽頭係數
均可獲得最佳的均衡效果 使失真最小
以上兩種準則都是根據均衡器輸出的單個脈衝響應來規定的
如果時間參考點選擇在別處 則濾波器輸出的
在分
波形
析橫向濾波器時 我們均把時間原點 假設在濾波器中心點處 即 處
形狀是相同的 所不同的僅僅是整個波形的提前或延 .遲
103.
103
1. 最小最小最小最小峰值法峰值法峰值法峰值法—迫零迫零迫零迫零(ZF)調整調整調整調整法法法法
0
0
0
0 0
0
0
00 0 0
0 0
1
( )
1 or 1
:
, 1, :
1
, , 1,
k
k
k
k k
k
k
N
k i k i
i N
N N N
i i i i i i k i
k
k i
i N i N i N i
i i
y y
D x
x
x x D x
y C x
y C x C x C x C C x y C x
∞
=−∞
≠
∞
=−∞
≠
−
=−
− − − −
=− =− =− =
≠ ≠
=
=
=
⇒ = = + =
=
=
⇒ = − → =
∑
∑
∑
∑ ∑ ∑
代入
未均衡前的輸入峰值失真 稱為初始失真 可表示為
若 是歸一化的 且令 則上式變為
方便起見 將樣值 也歸一化 且令 則根據
0
0
0 0
0
0
0
1
( ) ,
( ) .
{ } (
:
, , .
,
Lucky : 1,
)
N
N
N
k i k i k i k k
i N k
k k
N
i k i k
k i
i k
k i N
k k
i
y C x x x x D y
y
D C x x x x
x D C C
D C
D D
−
∞
− −
=− =−∞
≠ ≠
∞
− −
=−∞ =−
≠ ≠
= − +
=
<
=
⇒ − +
∑
∑ ∑
∑ ∑
i
i
再代入峰值失真定義式
得
可見 在輸入序列 給定的情況下 峰值畸變 是各抽頭係數 除 外 的函數
顯然 求解使 最小的 是我們所關心的.
曾證明 如果初始失真 則 的最小值 0
0, 1
{ }
1,
.
,
0
: 2 1 .
k
i k
y
k
y
y
C N
N
k
≤ ≤
=
=
+
必然發生在 前後的 都等於零的情況下
這定理的數學意義是 所求的係數 應是 成立時的 個聯立方程的解
104.
104
0
0
0
0
Lucky : 1,.
:
( ) .
0, 1
{ }
1, 0
0, 1, 2,...
2 1 .
2 1
,
:
N
i k i k i k
k i N
k
k
k
k
N
i k
i
i
i
i N
i
D C x x
D D
x x
k N
y
k
C x k
y
N
C
C
N
x
y
N
∞
− −
=−∞ =−
≠ ≠
−
=−
−
= − +
≤
<
≤
=
=
= = ± ±
+
±
+
∑ ∑
∑
i 曾證明 如果初始失真 則 的最小值必然發生在 前後的 都等於零的情況下
所求的係數 應是 成立時的 個聯立方程的解
這 個線性方程為
0 1 2 1
1 0
2 2 1 0 1
(*),
1, 0
0
0
.1
0
0
N
i N
N
N N
N N N
N N N
N
k
C
x x x C
x x x C
x x x C
C
=−
−
− − − +
− −
− −
= =
=
⇒
∑
⋯ ⋮
⋮ ⋮ ⋯ ⋮ ⋮
⋯
⋮ ⋮ ⋮ ⋮ ⋮
i
⋯ ⋮
將上式寫成矩陣形式
這個聯立方程的解的物理意
0 0
0
: , ,
( 0, ) . " " , " " .
1( ) , 2 ,
ISI, , .
{ } (*)k i
k
x C
y k k N
D C N
y N D
≠ ≤
<i
義是 在輸入序列 給定時 如果按上式方程組 調整或設計各抽頭係數
可迫使均衡器輸出的各抽樣值 為零 這種調整叫做 迫零 調整 所設計的均衡器稱為 迫零 均衡器
它能保證在 這條件等效於在均衡前有一睜開的眼圖時 調整除 外的 個抽頭增益
並迫使 前後各有 個取樣點上無 此時 取最小值 均衡效果達到最佳
105.
105
Ex: 設計設計設計設計一個具有一個具有一個具有一個具有3個抽頭個抽頭個抽頭個抽頭的的的的ZF均均均均衡器衡器衡器衡器, 以減小碼間串擾以減小碼間串擾以減小碼間串擾以減小碼間串擾.
已已已已知知知知x-2= 0 , x-1 = 0.1, x0 = 1, x1 = -0.2 , x2 = 0.1, 求求求求3個抽頭的係數個抽頭的係數個抽頭的係數個抽頭的係數, 並計算均衡前後的峰值失真並計算均衡前後的峰值失真並計算均衡前後的峰值失真並計算均衡前後的峰值失真.
0 1 2 1
1 0 1 0
2 1 0 1
1 0
1 0 1
1 0 1
1 0 1
0
1
0
0.1 0
0.2 0.1 1
0.1 0.2 0
0.09606, 0.9606, 0.2017
2 1 3,
,
N
k i k i
i N
x x x C
x x x C
x x x C
C C
C C C
C C C
C
y
N
C C
C x
− − −
−
−
−
−
−
−
=−
=
+ =
− + + =
− + =
=
+
= − = =
=根據上矩陣公式和 列出矩陣方程
將值代入上式 列出方程組
解聯立得
1 0 1 3 2 2 3
0
0
0
0
0
0
0, 1, 0, 0, 0.0096, 0.0557, 0.02016
1
0.4
1
0.0
:
:
4.6 .
, 3 ,
ISI. ,
IS ,
6
I
8 9
k
k
k
k
k
k
y y y y y y y
D
x
y
x
D y
y
− − −
∞
=−∞
≠
∞
=−∞
≠
⇒ = = = = = = =
= =
= =
∑
∑
∑
輸入峰值失真為
輸出峰值失真為
均衡後的峰值失真減小 倍
由上例可見 抽頭均衡器可以使兩側各有一個零點 但在遠離 的一些
抽樣點上仍會有 這就是說抽頭有限時
總不能完全消除 ISI .但適當增加抽頭數可以將 減小到相當小的程度
BUT ZF還不是最優解還不是最優解還不是最優解還不是最優解!
108
2. 最小最小最小最小均方失真均方失真均方失真均方失真法法法法(LMS)自自自自適應適應適應適應(adaptive)均衡器均衡器均衡器均衡器
“ZF”均衡器的缺點: 必須限制初始失真D0< 1.
若用最小均方失真準則也可匯出抽頭係數必須滿足的2N+1個方程, 從中也可解得使均方失真最小的2N+1個
抽頭係數, 不過, 這時不需對初始失真D0 提出限制.
下面介紹一種按最小均方誤差準則來構成的自適應均衡器.
• 自適應均衡原理: 自適應均衡器不再利用專門的測試單脈衝進行誤差的調整, 而是在傳輸數據期間借
助信號本身來調整增益, 從而實現自動均衡的目的.
• 由於數字信號通常是一種隨機信號, 所以, 自適應均衡器的輸出波形不再是單脈衝響應, 而是實際的數
據信號.
2 2
2
2
, , ,
:
, .
, . ,
{ } ( ) {
( )
,
}
{ }
k k k
k k
N N
k i k i i k i k
i N i N
k k
k
e y a
e E y
a
a
y C x e E C x a
x t y
a
k
− −
=− =−
= −
= −
= = −⇒
∑ ∑
設發送序列為 均衡器輸入為 均衡後輸出的樣值序列為 此時誤差信號為
均方誤差定義為
當 是隨機數據序列時 上式最小化與均方失真最小化是一致的
將 上式
可見 均方誤差是各抽頭增益的函數 我們期望對於任意的 都應使均方誤差最小
代入
故
[ ]
2
. ISI
2
where ,
k k i
i
N
k k k i k i k
i N
i
e
E e x
C
e y C
C
a x a
−
−
=−
∂
=
∂
−
⇒
= − = ∑
將上式對 求偏導數
表示誤差值 這裡誤差的起因包括 和噪聲 而不僅僅是波形失真.
109.
109
2
. ISI ,where
2[ ] , 0, [ ] 0.
.
,
.( )
,
,
N
k k k i k i k
i N
k k i
i
k
k
k i
k i
k k i
e y a C x
E e x
e x
a
e
E e x
C
e x i N
−
=
−
−
−
−
− =
= − = −
∂
=
∂
≤
∑
要使均方誤差最小 應使上式等
表示誤差值 這裡誤差
於 即
抽頭增益的調整可以借
的起因包括 和噪聲 而不僅僅是波形失真.
從 可見
這就要求誤差 與均衡
助對誤差 和樣值 乘積的統計平均
器輸入
值
若這個平
樣值 應互不相關
這
均值不等
就 明
於零
說
則 , .
.
應通過增益調整使其向零值變化 直到使其等於零
統計平均器可以是一個求算術平均
止
的器件
為
3抽頭自適應均衡器原理方框圖
[ ]k k iE e x −
111
Summery
時時時時域均衡域均衡域均衡域均衡 → ISI↓
()H ω′
有有有有 ISI
ݔݔݔݔ()ݐ
( )H ω ( )T ω
無無無無 ISI
ݕݕݕݕ()ݐ
有有有有誤差誤差誤差誤差
if equalizer
ISI
then ( ) IS
(( ) ( )( )
.
)
I
T TH H
y t
ω ωω ω′∋ =插入
滿足無 的頻域條件
在抽樣時刻上無
1
,
2 2
) ) ,
2 /
,
2
( )
( ) [
( )
(
( )
(
2
(
]
)
( )
22
(
(
)
(
(
)
)
) ( )B
B
i B
B
i B B B
B
B
B
i B
jnT
n T n B
B
n n
jnB B
n
i B
T
T
i i
T
T T T
T
T
T
i TH
T
C e
H
H
i
H
T
h t F C
H
T
t nT
T T
C e
i
H
T
T
T T
T
ω
π
ω
π π π
ω
π
π
ω
π
ω
δ
ππ ω
π
ω
ω ω
ω
ω
ω
ω
ω
ω ω
∞ ∞
− −
=−∞ =−∞
= ≤
+ + = ≤
= ≤
+
= ⇔
′ +
′
= = −
=
=
+
∑
∑
∑
∑ ∑
∑
帶入
是 為週期的函數
BB
B
TT
T
d
π
ω
π ω−∫
由hT(t)構造出equalizer的結構: 橫向濾波器
( ) ( )T n B
n
h t C t nTδ= −∑
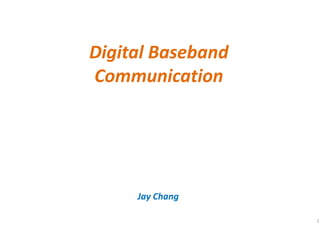












![14
1
1 2
2
, , .
, , :
( ) ( ) ( )
( ) ( )
[ ( ) (1 ) ( )] ( )
( )
, ( )
( )
, ( )
B B n
n n
B
s t v t u t
Pg t nT P g t nT v t
g ts t
v
g t
v t v t T
t
∞ ∞
=−∞ =−∞
= − + − − =∑ ∑
為了使頻譜分析的物理概念清楚 推導過程簡化 我們可以把 分解成穩態波 和交變波
所謂 它取決於每個碼元內出現 和 的機率加權平均 因此可表示成
由於 在每個碼元內的統計平均波形相
穩態波 即隨機序列 的統計平均分量
同 故 是以 為週期
1 1 2 1 2
2 1 2 1 2
( ) ( ) ( ) ( ) ( ), ( ) ( )
( ) ( ) (1 ) ( ) (1 )[ ( ) ( )],
( )
( ) ( ) (1 ) ( ) [ ( ) ( )],
)
.
,( n
n
B B B B B
n
B B B B B
u t s t v t u t u t
g t nT Pg t nT P g t nT P g t nT g t nT P
u t
g t nT Pg t nT P g t nT P g t nT g t n
s t v tu t
T
∞
=−∞
= − =
− − − − − − = − − − −
=
− − − − − − = − − − −
∑
的週期信號
是交
以機
變 與波
率
之差 即
以
1 2
(1 )
1 ,
( ) [ ( ) ( )] where
, (1 )
( .)
n n B B n
P
P P
u t a g t nT g t nT a
P
u
P
t
−
−
= − − − =
− −
機率
以
或寫成
是一個隨機脈
機率
以 率
衝序列
機
思路思路思路思路:::: 分解 交變波 穩態波思路思路思路思路:::: 分解 交變波 穩態波
)( )) ((u ts t v t= +
( (( )) )s u vP ff PP f= +
計算出穩態波和交變波的PSD
就可得隨機脈衝序列s(t)頻譜特性](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-14-320.jpg)
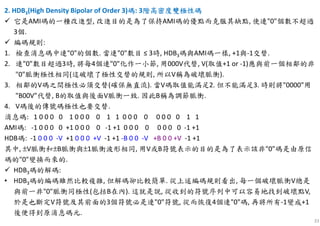
![15
1 2
2 22
2
1 2
1
( ) [ ( ) (1 ) ( )]
1 1
( ) wher
, so Fourier
/ 2, /
e , ( )
( ) ( ) ( ) (1 ) ( )
1
(
( )
2 ( 0)
)
B
B B
B
B B
n
T
j mf t j mf t
Tm B m
m B B
B B
m
B
B v t Pg t nT P g t nT
v t C e f C v t e dt
T T
T T v t Pg t P g t
C Pg
t
t
T
n
T
v
π π
∞
=−∞
∞
−
−
=−∞
= − + − −
= = =
=− =
=
∴ + −
+
∑
∑ ∫
∵
是以 為週期的週期由於 可以展成 級數
在 範圍內
信號
[ ]
[ ]
22
2
2
2
1 2 1 2
2 2
1 1 2 2
Fourier P
(1 ) ( )
1
( ) (1 ) ( ) [ ( ) (1 ) ( )]
w
( )
SD
here ( ) ( ) , ( ) ( )
[
B
B
B
B
B B
T
j mf t
T
j mf t
m B B B
B
j mf t j mf t
v B
B B
P g t e dt
C Pg t P g t e dt f PG mf P G mf
T
G mf g t e dt G mf g t e
P f f G
t
P
d
π
π
π π
−
−
∞
−
−∞
∞ ∞
− −
−∞ −∞
−
⇒ = + − = +
=
−
= =
∫
∫
∫ ∫
根據週期信號的功率譜密度與 係數的關係可得 :
2
1 2
2
( ) (1 ) ( )] ( ) ( )
( 0) ( 1
. PSD
).
B B B
m
v mmf P G mf f mf P f C
m m
δ
∞
=−∞
=
+ − −
=
∑ 振幅取決於 的離散線譜,
根據離散線譜可以推得隨機序列是否包含直流分量 和定時分量
穩態波的
1. v(t)的功率譜密度的功率譜密度的功率譜密度的功率譜密度Pv(f)](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-15-320.jpg)

![17
2
2 2
( )
[ ( ) ]
( ) lim
( ): ( ) ( )
(
,
) ( ) .
[ ( ) ] [ ( ) ]
( ) l
:
: , 2 1 ,
im ( ) lim
(2
2 1
T
u
T
T
B
T T
u u
T N
T
u t
u t u t
E
T N
E U f
P f
T
U f
T
E U f E U f
P f P f
N
N
T
T N
→∞
→∞ →∞
+
=
= +
= ⇒ =
由於 是一個功率型的隨機脈衝序列 它的功率譜密度可採用截短函數和統計平均的方法來求
的截短函數 所對應的頻譜函數
統計平均
截取時間 設它等於 個碼元的長度 即 是一個足夠大的整數
1 2
22 2
1 2 1 2
2
1 1 2
1)
( )
( ) ( ) [ ( ) ( )]
( ) ( ) [ ( ) ( )] [ ( ) ( )]
wh
:
ere ( ) ( ) ,
B
B
N N
T n n B B
n N n N
N N
j fnTj ft j ft
T T n B B n
n N n N
j f
T
t
T
u t u t a g t nT g t nT
U f u t e dt a g t nT g t nT e dt a e G f
u
G f
G f g t e
t
dt G
ππ π
π
=− =−
∞ ∞
−− −
−∞ −∞
=− =−
∞
−
−∞
+
= = − − −
= = − − − = −
=
∑ ∑
∑ ∑∫ ∫
∫
現在先求出 的頻譜函數
2
2
2 2 ( )
1 2 1 2
2 2 ( )
1 2 1 2
( ) ( )
( ) ( ) ( ) [ ( ) ( )][ ( ) ( )]
[ ( ) ] ( ) [ ( ) ( )][ ( ): ( )]
B
B
j ft
N N
j f n m T
T T T m n
m N n N
N N
j f n m T
T m n
m N n N
f g t e dt
U f U f U f a a e G f G f G f G f
E U f E a a e G f G f G f G f
π
π
π
∞
−
−∞
−∗ ∗
=− =−
− ∗ ∗
=− =−
=
∴ = = − −
= − −
∫
∑ ∑
∑ ∑其統計平均為
2. u(t)的功率譜密度的功率譜密度的功率譜密度的功率譜密度Pu(f)](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-17-320.jpg)
![18
2 2 ( )
1 2 1 2
2 2 ( )
1 2 1 2
( ) ( ) ( ) [ ( ) ( )]
1 ,
[ ( ) ( )]
[ ( ) ] (:
,
) [ ( ) ( )]
,
[ )]
(
( (
1
)
)
B
B
N N
j f n m T
T T T m n
m N n N
N N
j f n m T
T m n
m N n N
m
n
U f U f U f a a e G f G f G f G f
E U f E a a e
P P
G f G f G f G f
am
a
n
P P
a
π
π
−∗ ∗
=− =−
− ∗ ∗
=− =−
−
=
=
− −
∴ = = − −
= − −
∑ ∑
∑ ∑
i
其統
以
計平均為
當 時
機率
以機率
2
2 2 2 2
2
2 2
2 2 2 2 2 2
(1 ) ,
[ ] (1 ) (1 ) (1 )
, (1 )
(1 ) ,
, (1 ) [ ] (1 ) (1 ) 2 (
(1 ),
,
)2 (1
n n n
m n m n
P P
a E a P P P P P P
P P
P P
a a P P E a a P P P P
P P
m P
P P
n
−
= = ∴ = − + − = −
−
−
= − ∴ = − + − +
−
≠
− −
i
以機率
以機率
以機率
以機率
以
時
機率
當
2 2 ( )
1 2 1 2
2
2 2 22
1 2 1 2
1 )( 1) 0
[ ( ) ] ( ) [ ( ) ( )][ ( ) ( )]
[ ( ) ]
[ ( ) ] [ ] ( ) ( ) (2 1) (1 ) ( ) ( ) , ( ) li
2 1
m
( )
, B
N N
j f n m T
T m n
m N n N
N
T
T n u
N
n N B
m n
P P P
E U f E a a e G f G f G f G f
E U f
E U f E a G f G f N P P G f G f P f
N T
π − ∗ ∗
=− =−
→∞
=−
− − =
= − −
⇒ = − = + − − =
+
=∑ ∑
∑
由以上計算可知 的統計平均值僅在 時存在
代入
即可求
2
21 2
1 2
1 2
(2 1) (1 ) ( ) ( )
( ) lim (1 ) ( ) (
, ( ) , ( ) ( ) .
( ) ) .
(2 1
, .
)
u B
N
B
uP f g t g t
N P P G f G f
P f f P P G f G f
N T
u t
P
→∞
+ − −
= = − −
+
⇒
上式表明 交變波的功
得 的功率
率譜 是連續譜 它與 和 的頻譜以及機率 有關
通常 根據連續譜可以確定隨機序
譜密
列的頻寬
度](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-18-320.jpg)
![19
2
1 2
2
1 2
2 2
1 2 1 2
( ) ( ) ( )
( ) (1 ) ( ) ( )
( ) [ ( ) (1 ) ( )] ( )
( )
DSB PSD: ( ) ( ) ( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] (
,
,
u B
v B B B B
m
s u v B B B B B
P f f P P G f G f
P f f PG mf P G mf f mf
P f P f P f f P P G f G
s t u t v t
f f PG mf P G mf f mf
s t
δ
δ
∞
=−∞
= − −
= + − −
= + = − − + + −
= +
−
∑
i
由於 所以將下兩式相加
得到隨機序列 的功率譜密度 即
2
1 2
2 22 2
1 2 1 2
2
1
1
).
SSB PSD: ( ) 2 (1 ) ( ) ( )
(0) (1 ) (0) ( ) 2 ( ) (1 ) ( ) ( ),
where 1/ : ,
0.
( ),: )( ( )
m
s B
B B B
B B B B B
m
P f f P P G f G f
f PG P G f f PG mf P G mf f
f T T G f G
f
f
m fδ δ
∞
=−∞
∞
=
=
= − − +
+ − + + − − ≥
∑
∑
i
碼元速率 碼元寬度 持續時間 和 分別 1 2
1 2 1 2
1 2
1 2
( ) ( )
( ) ( ) ( )
( ) ( ) ( ( )
(
Fourier
) ( )
(
:
1. .
2. , , ) .
.
3 ). , ( )
u vs
g t g t
P f
g t g t G f G f
g t g t P
g t g t
P P
≠
是 和 的 變換.
結論
二進制隨機脈衝序列的功率譜 可能包含連續譜 第一項 和離散譜 第二項
連續譜總是存在的 這是因為代表數據信息的 和 波形不能完全相同 故有
譜的形狀取決於 和 的頻譜以及出現的機率
離散譜是否存在 取決於 和 的波形及其出現的
1 2
. ,
, 1/ 2 , .
( 0) ( 1)
( ) ( ) ( ) ( )
.
( )B
P
g t g t g t P
m
mf
m
fδ= − = =
= =
−
機率 一般情況下 它也總是存在的,
但對於雙極性信號 且機率 等概 時 則沒有離散分量
根據離散譜可以確定隨機序列是否有直流分量 和定時分量
3. s(t)的功率譜密度的功率譜密度的功率譜密度的功率譜密度Ps(f)](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-19-320.jpg)
![20
Ex: 求求求求單極性單極性單極性單極性NRZ和和和和RZ矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率譜譜譜譜
1 2
2 2
1 2 1 2
2 2
( ) ( ) ( )
( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] (
: 0, , DSB PSD,
DSB PSD:
1/ 2 ,
)
( ) (1 ) ( ) (1 ) ( ) ( )
1
( )
4
s B B B B B
m
s B B B B
m
s
P f f P P G f G f f PG mf P G mf f m
g
f
P f f P P G f f P G mf f mf
t g t g
fP P f
t
δ
δ
∞
=−∞
∞
=−∞
= − − + + − −
= =
=
= − + − −
=
∑
∑
對於單極性波形 若設 將其代入下式
得隨機脈衝序列的
時 上式簡化為 2
2
2 21
( ) ( ) ( ).
4
1,
( ) 2
0, others
,
0, (0) sinc(0) 0,
:
sin
( ) sinc( ).
( )
(1) "1" ( ) ( ) N
,
RZ
B B B B
m
B
B
B B B
B
B
sB
G f f G mf f mf
T
t
g t
fT
G f T T fT
fT
Pm G T
f
g t g t
mf
m
f
δ
π
π
π
∞
=−∞
+ −
≤
=
=
= = ≠
=
=
=
∑
即
頻譜函數為
若 故頻譜 中有直流分量
當 時
若 為
若表示 碼的
不等於零的
波形 為 矩形脈
數
衝
整
2 2 2 22
( ) ( ) 0, ( ) ( )
sin1 1 1 1
( ) ( ) ( ) ( ) ( )
4 4 4 4
sinc
1
( ) sinc ( ) ( ).
4
,
4
B s B
B
s B B B B B B
m B
B
s B
BG mf n P f f f
fT
P f f G f f G mf f mf f T f
fT
T
P f fT f
T
π δ
π δ
π
δ δ
π
∞
=−∞
⇒
= = −
= + − = + =
+∑
頻譜 中離散譜為零 因而無定時分量
單極性NRZ PSD](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-20-320.jpg)
![1 2
2 2
1 2 1 2
2 2
( ) ( ) ( )
( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] (
: 0, , DSB PSD,
DSB PSD:
1/ 2 ,
)
( ) (1 ) ( ) (1 ) ( ) ( )
1
( )
4
s B B B B B
m
s B B B B
m
s
P f f P P G f G f f PG mf P G mf f m
g
f
P f f P P G f f P G mf f mf
t g t g
fP P f
t
δ
δ
∞
=−∞
∞
=−∞
= − − + + − −
= =
=
= − + − −
=
∑
∑
對於單極性波形 若設 將其代入下式
得隨機脈衝序列的
時 上式簡化為
2
2
221
( ) ( ) ( ).
4
( ) sinc, / 2 ,
0, (0) sinc(0) / 2 0,
: ,
(2)
2 2
( )
( ) ,sinc( ) 0,
"1" ( ) ( RZ
2 2
)
B B B B
m
B B
s
B
B
B
B
B
G f f G mf f mf
T T
G f f
P f
T m
G m
g T
m G
t
T
f mf m od
g t
fd
δ
π
π
τ
∞
=−∞
+ −
= =
= = ≠
= ∈
= ≠
=
∑
即脈衝寬度若表示 碼的波形 為半占空 時 其頻譜函數為
若 故頻譜 中有直流分量
當 時 若 此時有離
矩形
散譜
脈衝
有
2 2 222
( )
( ) sinc( ) 0,
2 2
1 1
( ) ( ) (
1
( ) sinc sinc ( ).
16
) ( )
2 16 24
1
,
4
B
B
s B B B B
m
B B
s B
m
T m
G mf
P f f G f
T fT
f G mf
m
P f f mf
m
m ev n
f
e
mf
π
δ
π π
δ
∞
=−
∞
=−∞ ∞
=
=
=
∈
=
= + + −
−
⇒
∑∑
定時分量 時
若 此時無離散譜
21
單極性RZ PSD](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-21-320.jpg)
![22
Ex: 求求求求雙雙雙雙極性極性極性極性NRZ和和和和RZ矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率矩形脈衝序列的功率譜譜譜譜
2 2
1 2 1 2
2 2
1 2: , DSB PSD( ) ( ) ( )
( ) (1 ) ( ) ( ) [ ( ) (1 ) ( )] ( )
( ) 4 (1 ) ( ) (2 1)
,
DSB PSD ( ) ( )
( )
:
1 (/ 2 ,
s B B B B B
m
s B B B B
m
s B
P f f P P G f G f f PG mf P G mf f mf
P f f P P G f f P G m
g t g t g t
f f mf
P f fP G
δ
δ
∞
=−∞
∞
=−∞
= − =
=
= − − + + − −
= − + − −
=
∑
∑
對於雙極性波形 設 將其代入下式
得隨機脈衝序列的
時 上式簡化為
2
2
2
(1) ( ) 1 NRZ , ( ) sinc ( ).
(2) ( ) 1 RZ , ( ) sinc .
4 2
) .
s B B
B B
s
g t P f T fT
T f
f
T
g t P f
π
π
=
=
若 是高度為 的 矩形脈衝 上式可寫成
若 是高度為 的半占空 矩形脈衝 則
雙極性NRZ PSD
雙極性RZ PSD
2 21
( ) sinc sinc ( )
16 2 16 2
B B
s B
m
T fT m
P f f mf
π π
δ
∞
=−∞
= + −
∑
2 1
( ) sinc ( ) ( )
4 4
B
s B
T
P f fT fπ δ= +
2
( ) sinc ( )s B BP f T fTπ=
2
( ) sinc
4 2
B B
s
T fT
P f
π
=
](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-22-320.jpg)
















![40
clc, close all;
h=[1 1 0 1 0 0 1];
est_initial=1;
con=est_initial;%Set 1 -1
long=length(h);%Number of bits of the signal
n=1;%Initial state for "while" loop
ac=[];%Null matrix to code signal.
bits=[];%Null matrix to original signal.
h(long+1)=0;
while n<=long%Code to finished the length of the signal.
if h(n)==1 %If the bit is 1
bit=[ones(1,100)];
s=[con*ones(1,50) -con*ones(1,50)];
con=con*-1;%Switch state of the signal
else %If the bit is 0
bit=[zeros(1,100)];
s=[con*ones(1,100)];
if h(n+1)==0%If the next bit is 0
con=con*-1;%Switch state of the signal
end
end
ac=[ac s];%Accumulate miller code.
bits=[bits bit];%Accumulate signal
n=n+1;%Increment of the cycle
s=[];%Reset temporal matrix s.
end
subplot(2,1,1);plot(bits,'LineWidth',2);
title('input signal');
axis([0 100*(length(h)-1) -2 2])
grid on
subplot(2,1,2);plot(ac,'LineWidth',2)
title('miller code')
axis([0 100*(length(h)-1) -2 2])
grid on
https://www.mathworks.com/matlabcentral/fileexchange/19881-program-to-simulate-the-miller-code](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-40-320.jpg)









![( )y t
( )C ω
{ }na
( )d t
50
( ) ( )
( ) ( ) ( ) ( )
1
( ) ( )
2
( ) ( ) ( ) ( )
1
( ) ( )
2
n s
n
T n T s
n
j t
T T
T R
j t
d t a t nT
s t d t g t a g t nT
g t G e d
H G C G
h t H e d
ω
ω
δ
ω ω
π
ω ω ω ω
ω ω
π
∞
=−∞
∞
=−∞
∞
−∞
∞
−∞
= −
= ∗ = −
=
=
=
∑
∑
∫
∫
s(t)
[ ]0 0 0 0
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
R n s R
n
s k n s R s
n k
r t d t h t n t a h t nT n t
r kT t a h t a h k n T t n kT t
∞
=−∞
≠
= ∗ + = − +
+ = + − + + +
∑
∑
r(t) 0( )sr kT t+⊕
{ }na′
0,1,0,1 or -1,1,-1,1
對應的BB signal
gT(t): impulse response
分析前先把model建好
nR(t)是加性噪聲n(t)經過接
收濾波器後輸出的噪聲
為了確定第k個碼元 ak 的取值, 首先應
在t = kTs + t0 時刻上對r(t)進行抽樣, 以確
定r(t)在該樣點上的值.
t0: 信道和接收濾波器造成的時延.
Digital Modulation](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-50-320.jpg)
![51
第一項akh(t0)是第k個接收碼元波形的抽樣值, 它是確定ak的依據.
第二項(Σ項)是除第k個碼元以外的其它碼元波形在第k個抽樣時刻上的總和(代數和), 它對當
前碼元ak的判決起著干擾的作用, 所以稱之為碼間串擾值(ISI).
由於ak是以概率出現的, 故ISI通常是一個隨機變數.
第三項nR(kTB + t0)是輸出噪聲在抽樣瞬間的值, 它是一種隨機干擾, 也會影響對第k個碼元的正
確判決.
此時, 實際抽樣值不僅有本碼元的值, 還有碼間串擾值及噪聲, 故當r (kTs + t0)加到判決電路時, 對
ak取值的判決可能判對也可能判錯. 例如, 在二進制數字通信時, ak的可能取值為"0"或"1", 若判決
電路的判決門限為Vd , 則這時判決規則為:
• 當 r(kTs + t0) > Vd時, 判ak為"1"
• 當 r(kTs + t0) < Vd時, 判ak為"0".
顯然, 只有當碼間串擾值和噪聲足夠小時, 才能基本保證上述判決的正確.
[ ]0 0 0 0( ) ( ) ( ) ( )s k n s R s
n k
r kT t a h t a h k n T t n kT t
≠
+ = + − + + +∑
Digital Modulation
ISI](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-51-320.jpg)

![53
( )h t
0t 0sT t+
( )h t
0t 02 sT t+0sT t+
[ ]0(ISI )n s
n k
a h k n T t
≠
= − +∑
[ ]0( ) 0n s
n k
a h k n T t
≠
− + =∑
若能使若能使若能使若能使:
, 則無則無則無則無ISI
怎麼做怎麼做怎麼做怎麼做????
做不到做不到做不到做不到 關注抽樣時刻關注抽樣時刻關注抽樣時刻關注抽樣時刻
等等等等Ts的零的零的零的零點點點點
由於an是隨機的, 要想通過各項相互抵消使碼間串擾為0是不行的.
這就需要對h(t)的波形提出要求.
若讓h[(k-n)Ts + t0] 在Ts + t0、2Ts + t0等後面碼元抽樣判決時刻上正好為0, 就能消除碼間串擾.
這就是消除碼間串擾的基本思想.
不考慮噪聲情況下如何消除不考慮噪聲情況下如何消除不考慮噪聲情況下如何消除不考慮噪聲情況下如何消除ISI](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-53-320.jpg)


![56
Digital Modulation
( )H ω
BT
π−
BT
π0 ω
,
( )
0,
B
B
B
T
T
H
T
π
ω
ω
π
ω
≤
=
>
sin
( ) sinc( / )B
B
B
t
T
h t t T
t
T
π
π
π
= =
FT
若輸入資料以RB = 1/TB波特的速率進行傳輸, 則在抽樣時刻上不存在碼間串擾.
• 若以高於1/TB波特的碼元速率傳送時, 將存在碼間串擾.
• 通常將此頻寬B = 1/(2TB)稱為Nyquist頻寬頻寬頻寬頻寬fN, 將RB稱為Nyquist速率速率速率速率.
此基帶系統所能提供的最高頻帶利用率η為 RB/B = 2 [Baud/Hz], 這種特性陡峭在物理上是無法實現的
• 並且h(t)的振盪衰減慢, 使之對定時精度要求很高, 故不能實用。
How to solve ? 在fN奇對稱波形進行"圓滑"+"滾降"
Nyquist最窄頻寬 無ISI最高Baud Nyquist rate
(無ISI BB最高頻帶利用率)
無無無無ISI設計設計設計設計](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-56-320.jpg)
![57
Digital Modulation
raised-cosine filter minimize ISI
(1 )
, 0
(1 ) (1 )
( ) [1 sin ( )],
2 2
(1 )
0,
S
S
S S
S S S
S
T
T
T T
H
T T T
T
α π
ω
π α π α π
ω ω ω
α
α π
ω
−
≤ <
− +
= + − ≤ <
+
≥
( ) 2 2 2
sin / cos /
/ 1 4 /
S S
S S
t T t T
h t
t T t T
π απ
π α
= ⋅
−
FT
/ , 0Nf fα α∆≡ =理想低通
引入滾降係數
描述滾降程度
( )0 ~1
1
2
N
B N
B
f
f
R f
T
α ∆
=
= =
(1 )N NB f f fα∆= + = +
無無無無ISI設計設計設計設計](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-57-320.jpg)
![58
,
:
:
0 ,
( )
(1 )
2 2
[Baud/Hz]
(1 ) (1 )
( )
2
1 cos
1 , ,
,
2 2
( )
:
2
0,
(
N N
NB
N
s s
s
s
B f f f
fR
h t
B f
T T
T
H
t
H
T
h
α
η
α α
ω
ω π
ω
ω
π
ω
α
α
α
∆= + = +
= = =
+ +
=
+ ≤
=
=
>
滾降係數 越大 的拖尾衰減越快
滾降使頻寬增大為
餘弦滾降系統的最高頻帶利用率為
當 時 即為前面所述的理想低通系統
當 時 即為升余弦頻譜特性 這時 可表示為:
單位衝激響應為 2 2
sin cos
)
1 4
s s
s s
t T t T
t T t T
π π
π
= ⋅
−](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-58-320.jpg)

![60
(1 )
, 0
(1 ) (1 )
( ) [1 sin ( )],
2 2
(1 )
0,
S
S
S S
S S S
S
T
T
T T
H
T T T
T
α π
ω
π α π α π
ω ω ω
α
α π
ω
−
≤ <
− +
= + − ≤ <
+
≥
( ) 2 2 2
sin / cos /
/ 1 4 /
S S
S S
t T t T
h t
t T t T
π απ
π α
= ⋅
−
FT
/ Nf fα ∆≡
Digital Modulation
root-raised-cosine (RRC) filter
實際應用中1個在Tx, 1個在Rx, raised-cosine RRC RRC= ⋅
√ ̄
√ ̄ ̄ ̄ ̄ ̄ ̄
余弦滾降濾波器特點
1. 特性易實現
2. Response曲線拖尾收斂快, 擺幅較小
BUT代價
1. BW↑
2. 頻帶利用率η↓
無無無無ISI設計設計設計設計](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-60-320.jpg)


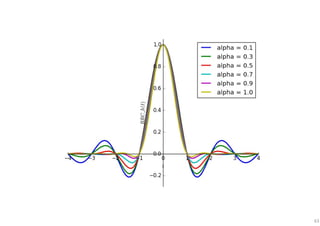
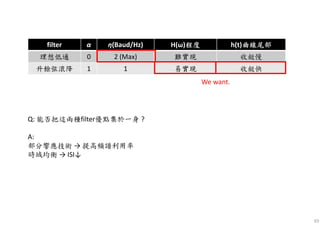




![70
2
2
(1) (0 /1) (0) (1/ 0)
"1" (1), "0" (0), :
, ,
, , , ,
,
(0 /1) (1/ 0)
(1) (0)
(1), (0) , ,
n d
d
e
n
P P
A V
P P P P P
P P
P
P A V
P
P
σ
σ
= +
i 假設信源發送 碼的機率為 發送 碼的機率為 則二進制基帶傳輸系統的總碼誤率為
將上面求出的 和 代入上式 可以看出
得碼誤率與發送機率 信號的峰值 噪聲功率 以及判決門限電平 有關
因此 在 給定時 碼誤率最終由 和判決門限 決
[ ]
2
2
.
, , , :
:
1
0
(0)
ln .
2 (1)
(1) (0) 0,
1 1 1
(0 /1) (1/ 0) 1 .
2 2
/ 2,
22 2
:
,
e
d
n
d
d
n
e
n n
P
V
P
V
A P
P P V
A A
P P P erf erfc
A
σ
σ σ
σ
∗
∗
∂
=
∂
⇒ =
= = =
= + = − =
i
定
在 一定條件下 可以找到一個使碼誤率最小的判決門限電平 稱為最佳門限電平
可求得最佳門限電平
若 則有 基帶傳輸系統總誤碼率為
由上式可見 在發 , ,
, .
/ , .
n
n eP
A
A
σ
σ ↑ ↓
送機率相等 且在最佳門限電平下
雙極性基帶系統的總碼誤率僅依賴於信號峰值 與噪聲方均根值 的比值 而與採用什麼樣的信號形式無關
且比值](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-70-320.jpg)
![71
二二二二進制進制進制進制單單單單極性極性極性極性基帶系統基帶系統基帶系統基帶系統
[ ]
0
2
( )
( )
(0)
ln .
2 (1)
1 1
(1) (0) / 2, (0
, 0 "1" "0" ,
0 .
:
1/ 2, : /1) (1/ 0) .
2 2 2 2
2
1
2 2
e
n
n
d
d e
n
A P
V
A P
A
P P V A P P P erfc
A
f x
A
P e c
A
rf
σ
σ
σ
∗
∗
=
= +
= = = = + =
+
−
i
對於單極性信號 若設它在抽樣時刻的電平取值為 或 分別對應信碼 或
則只需將下圖中 曲線的分佈中心由 移到 即可
則最佳門限電平
若 則有 基帶傳輸系統總誤碼率為
,
1. / , ,
.
.
2. , 0, , , .
/ 2,
1
.
2 2
e
n
nA
A
A
P erfc
σ
σ
=
i 比較雙極性和單極性基帶系統碼誤率可見
當比值 一定時 雙極性基帶系統的誤碼率比單極性的低 抗噪聲性能好
在等概條件下 雙極性的最佳判決門限電平為 與信號幅度無關 因而不隨信道特性變化而變 故能保持最佳狀態
而單極性的最佳判決門限電平為 它易受信道
單極
特
性
雙極性
性變化的 , .
3. , .
影響 從而導致碼誤率增大
因此 雙極性基帶系統比單極性基帶系統應用更為廣泛](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-71-320.jpg)













![85
解決差錯傳播問題的途徑解決差錯傳播問題的途徑解決差錯傳播問題的途徑解決差錯傳播問題的途徑如下如下如下如下:
1 1
1
mod2 1 mod2
: , .
( ) , i.e. . 2 .
: , ( ).
2 : [
{ }
2 [ ] ]
k k k k k k k k
k k k k
k k k k k
a b b a b a b b
b C b b
C b b b b
− −
−
−
⇒ = ⊕ = ⊕ ⊕
= +
⇒ = + = ⊕
i
i
i
預編碼 為了避免因相關編碼而引起的差錯傳播問題 可以在發送端相關編碼之前進行預編碼
其實就是把輸入信碼 變成差分碼 為模 加
相關編碼 把預編碼後的 作為發送濾波器的輸入碼元序列 得到 算術加
模 判決 若對上式進行模 處理 1 mod2
1
, i.e. [ ] .
2 , so .
, .
, " - - 2 " .
k k k
k k k
a a C
C a a
−
−
= =
對接收的 作模 處理後便直接得到了 不需要預先知道 不存在錯誤傳播現象
這是因為 預編碼後的信號各抽樣值之間解除了相關性
因此 整個上述處理過程可概括為 預編碼 相關編碼 模 判決 過程
Ex: ak和bk為二進制雙極性碼, 其取值為+1及-1(對應於"1"及"0")
ak 1 0 1 1 0 0 0 1 0 1 1
bk-1 0 1 1 0 1 1 1 1 0 0 1
bk 1 1 0 1 1 1 1 0 0 1 0
Ck 0 +2 0 0 +2 +2 +2 0 –2 0 0
↓
Ck′ 0 +2 0 0 +2 +2 +2 0 0 0 0
ak′ 1 0 1 1 0 0 0 1 1 1 1
1
2, 0
0,
:
1
k k kC b b −
±
=
= +判決規則
判
判
此例說明, 由當前值Ck可直接得到當前的ak , 錯誤不會傳播下去, 而是局限在受干擾碼元本身位置.
錯誤](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-85-320.jpg)

![87
部分響應的一般形式部分響應的一般形式部分響應的一般形式部分響應的一般形式
[ ]
[ ]
1 2
1 2
1 2
sin / , :
, ,...,
sin sin ( ) sin ( 1)
( ) ...
( )
, , .
, 1, 1, 0 ,
( 1
)
.
)
(
B
B B
N
B B B
B B
N
B B B
t t t N
g t R R R
t t t N
R R R
N T x x
T T
T T T
T T
T T T
R R I
g t
π π π
π π π
− − −
=
= + + +
− −
=
−
部分響應波形的一般形式可以是 個相繼間隔 的波形 之和 其運算式為
式中 為加權係數 其取值為正負整數和零
例如 當取 其餘係數等於 時 就是前面所述的第 類部分響應波形
的頻
( 1)
1
,
( ) ( ) (: so, / , /
, 1,2...
)
0,
( , ,) , .
.
, ,} }{ {
BT
B
B
B B
B
m
N
j m
m
m
kk k
T
T
T T
R
T
R m N
a
e
G G
C RC
ω
π
π
ω π
ω
ω
π
ω
− −
=
≤
=
>
−
=
=
∑
i
i
i
譜函數為 僅在 範圍內存在.
顯然 不同 將有不同類別的的部分響應信號 相應地有不同的相關編碼方式
相關編碼是為了得到預期的部分響應信號頻譜所必需的
若設輸入數據序列為 相應的相關編碼電平為 則有 1 2 1 ( 1)
1 2 1 ( 1)
, depend on . .
" " ,
...
" - - 2 "
1. : ... (mod )
P.S.
k k m k k
k
k
k k N k N
k k k N k N
a R a
C a L R C a
R a
a Rb R b R ba L
a
− − −
− − −
+ + +
= + + +⇒
i
由此看出 的電平數將 的進制數 及 的取值 且一般 的電平數將要超過 的進制數
為了避免因相關編碼而引起的 差錯傳播 現象 一般要經過類似於前面的 預編碼 相關編碼 模 判決 過程.
先對 進行預編碼
式中 和
1 2 1 ( 1)
mod
...
, " " " ".
2. :
3. ,
,
)
]
.
(
,
[
k
k
k k
k k
N
k
k
N
k
k
L
k
b L L
b
C L a C
C L
C Rb R b R
a
b− − −
+
= +
=
+ +⇒
⇒
已假設為 進制 所以式中 為 模 相加
將預編碼後的 進行相關編碼
再對 作模 處理 得到
此時不存在錯誤傳播問題 且接收端的解碼十分簡單 只需直接對 模 判決即可得
算術加](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-87-320.jpg)


![90
(a) 原理方框圖原理方框圖原理方框圖原理方框圖
預編碼預編碼預編碼預編碼: 可消除接收端的可消除接收端的可消除接收端的可消除接收端的"差錯傳播差錯傳播差錯傳播差錯傳播"現象現象現象現象:
bk=ak⨁⨁⨁⨁ bk-1 (模模模模2加加加加)即即即即 ak=bk⨁⨁⨁⨁ bk-1
Ck=bk+ bk-1相關編碼相關編碼相關編碼相關編碼: (算數加算數加算數加算數加)
接收端對Ck作"模模模模2 判決判決判決判決"即可恢復即可恢復即可恢復即可恢復ak :
[Ck]mod2= [ bk+ bk-1 ]mod2= ak
Summery: 第第第第I類類類類 部分響應系統部分響應系統部分響應系統部分響應系統](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-90-320.jpg)
![91
Summery:第第第第IV類類類類 部分響應系統部分響應系統部分響應系統部分響應系統
相關編碼相關編碼相關編碼相關編碼: Ck=bk- bk-2
預編碼預編碼預編碼預編碼: bk=ak⨁⨁⨁⨁ bk-2 即即即即ak=bk⨁⨁⨁⨁ bk-2
對對對對Ck作作作作模模模模2判決判決判決判決以恢復以恢復以恢復以恢復ak:
[Ck]mod2= [ bk-bk-2 ]mod2= bk⨁⨁⨁⨁ bk-2 =ak
—當前當前當前當前碼元只對碼元只對碼元只對碼元只對下下一個下下一個下下一個下下一個碼元產生碼間串擾碼元產生碼間串擾碼元產生碼間串擾碼元產生碼間串擾
(a) 原理方框圖原理方框圖原理方框圖原理方框圖](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-91-320.jpg)




![96
( ) ( ), where ( )
2
( ) ( ) ( ) ( ), ( )
: ,
, ISI.
( ) ( )
:
,
T n B
n
B
n
i B B
pf
C H
pf
h t C t nT
i
T H H H T
T
T T
T
H
δ ω
π π
ω ω ω ω ω ω
ω ω
∞
=−∞
= −
′ ′=
′
+ = ≤
∑
∑
如果在接收濾波器和抽樣判決器之間插入一個橫向濾波器的可調濾波器 其衝激響應為
完全依賴於 理論上就可消除抽樣時刻上的碼間串擾
設插入濾波器的頻率特性為 則當 滿足
則包括 在內的總特性 將能消除碼間串擾.
將
2 2 2
( ) ( ) ( ) ( )
/ , ( , ,
( ) ( )
2
( ) 2 ( ) ( ), )
(
( ) ,
:
I
)
2
)
SI
(
B B
i iB B
B
B
i B
B B B
B
B i
i i i
T H H H T H T T
T T
T
T
i
T T T
i
T T T
T
TH
T
T T i
T
π π π π π
ω ω ω ω ω ω ω ω
π
ω π ω ω
ω
π
ω
π
ω
ω
ω
′ ′= + = ≤ ⇒ + +
= ≤
+
= ≤
+ = ∑
∑ ∑
∑
如果 是以 為週期的週期函數 即 則 與 無關 可拿到 外面 於是有
即消除碼間串擾 的條件成立.
既然 是按上式延
代入
展的週期為
22 (
2 ( ) ( )
where ( ) or
2
( )
/ , Fourier :
, Fourier ( )
Fouri
)
er ,
B
B
BBB
B
B
B
jn T
jnT
B n
n
jn T TB B
n
T
TB
n n
T
jnT
i B
n
n
T
H
T T C e
T
C T
T T
C e de d C
T C
i
H
T
e
ω
π
ω
π
ω
π
ω
π ω
ππ ω
π ω ω
ω ωω
π
ω
∞
−
=−∞
−−
∞
−
=−∞
=
=
+
= ∴
=
∑
∫
∑
∫
∑
的週期函數 則 可用 級數來表示
由左式看出 係數 由 決定.
而對 求 反變換 則可求得其單位衝激響
1
( )
1
[ ]
:
( ) )
2
( .BjnT j t
n
n
T n B
n
h t T C e ne t Td CF ω ω
ω ω
π
δ−
−∞
−
∞
−
= = = −∑∫ ∑
應為](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-96-320.jpg)
![97
1
( ) 2 / , ( ) Fourier : ( )
( ) Fourier , :
( ) [ ( )] ( ).
B
B
jnT
B n
n
jnT
n
n
T n B
n
T T T T C e
T C e
h t F T C t nT
ω
ω
ω π ω ω
ω
ω δ
∞
−
=−∞
∞
−
=−∞
−
=
=
= = −
∑
∑
∑
為週期 的週期函數 則 可用 級數來表示
對 求 反變換 則可求得其單位衝激響應為
由由由由hT(t)構造出均衡器的構造出均衡器的構造出均衡器的構造出均衡器的結構結構結構結構—橫向濾波器橫向濾波器橫向濾波器橫向濾波器
來自接收濾波器
延遲單元
抽頭係數
去抽樣判決
橫向濾波器組成橫向濾波器組成橫向濾波器組成橫向濾波器組成
該網路是由無限多的按橫向排列的遲延單元TB和抽頭加權係數Cn 組成的, 因此稱為橫向濾波器橫向濾波器橫向濾波器橫向濾波器.
它的功能是利用無限多個響應波形之和, 將接收濾波器輸出端抽樣時刻上有ISI的響應波形變換成抽樣時刻
上無ISI的響應波形.
由于橫向濾波器的均衡原理是建立在響應波形上的, 故把這種均衡稱為時域均衡.
1
( ) 2 / , ( )
: ( ) [ ( )] ( ).
BjnT
B n
n
T n B
n
T T T C e
h t F T C t nT
ω
ω π ω
ω δ
∞
−
=−∞
−
=
= = −
∑
∑
為週期 的週期函數
其單位衝激響應為](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-97-320.jpg)
![98
橫向濾波器特性橫向濾波器特性橫向濾波器特性橫向濾波器特性
橫向濾波器的特性將取決於各抽頭係數Cn.
如果Cn是可調整的, 則圖中所示的濾波器是通用的; 特別當Cn可自動調整時, 則它能夠適應信道特性的變
化, 可以動態校正系統的時間響應.
理論上, 無限長的橫向濾波器可以完全消除抽樣時刻上的碼間串擾, 但實際中是不可實現的. 因為, 不僅均
衡器的長度受限制, 並且係數Cn的調整準確度也受到限制.
如果Cn的調整準確度得不到保證, 即使增加長度也不會獲得顯著的效果. 因此, 有必要進一步討論有限長
橫向濾波器的抽頭增益調整問題.
1
( ) 2 / , ( )
: ( ) [ ( )] ( ).
BjnT
B n
n
T n B
n
T T T C e
h t F T C t nT
ω
ω π ω
ω δ
∞
−
=−∞
−
=
= = −
∑
∑
為週期 的週期函數
其單位衝激響應為](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-98-320.jpg)
![99
有限長有限長有限長有限長橫向橫向橫向橫向濾波器的數學表示式濾波器的數學表示式濾波器的數學表示式濾波器的數學表示式
2 1 , ( ) , ,
, ,
( ) ( ) ( )
( ), ( ) ( )
( ) (
( )
) ( ) ( )
( ) ( )
. )
, (
(
N
i B
i N
N
i B
i N
BB i B B
N a e t
x t x t b
e t C t iT
y t x t e t C x t iT
y t c
y kT C x kT iTt kT
δ
=−
=−
= −+
= ∗ = −
= −=
∑
∑
設一個具有 個抽頭的橫向濾波器 如下圖 所示 其單位衝激響應為 則
設它的輸入為 是被均衡的對象 並設它沒有附加噪聲 如下圖 所示 則均衡後的輸出波形 為
在抽樣時刻 設系統無時延 上 有 ) [( ) ]
.
N N
i B
i N i N
N
k i k i
i N
C x k i T
y C x
=− =−
−
=−
= −
⇒ =
∑ ∑
∑將其簡寫為
來自接收濾波器
去判決電路
2 1N + 個抽頭橫向濾波器
( )x t輸入 ( )y t輸出](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-99-320.jpg)








![108
2. 最小最小最小最小均方失真均方失真均方失真均方失真法法法法(LMS)自自自自適應適應適應適應(adaptive)均衡器均衡器均衡器均衡器
“ZF”均衡器的缺點: 必須限制初始失真D0 < 1.
若用最小均方失真準則也可匯出抽頭係數必須滿足的2N+1個方程, 從中也可解得使均方失真最小的2N+1個
抽頭係數, 不過, 這時不需對初始失真D0 提出限制.
下面介紹一種按最小均方誤差準則來構成的自適應均衡器.
• 自適應均衡原理: 自適應均衡器不再利用專門的測試單脈衝進行誤差的調整, 而是在傳輸數據期間借
助信號本身來調整增益, 從而實現自動均衡的目的.
• 由於數字信號通常是一種隨機信號, 所以, 自適應均衡器的輸出波形不再是單脈衝響應, 而是實際的數
據信號.
2 2
2
2
, , ,
:
, .
, . ,
{ } ( ) {
( )
,
}
{ }
k k k
k k
N N
k i k i i k i k
i N i N
k k
k
e y a
e E y
a
a
y C x e E C x a
x t y
a
k
− −
=− =−
= −
= −
= = −⇒
∑ ∑
設發送序列為 均衡器輸入為 均衡後輸出的樣值序列為 此時誤差信號為
均方誤差定義為
當 是隨機數據序列時 上式最小化與均方失真最小化是一致的
將 上式
可見 均方誤差是各抽頭增益的函數 我們期望對於任意的 都應使均方誤差最小
代入
故
[ ]
2
. ISI
2
where ,
k k i
i
N
k k k i k i k
i N
i
e
E e x
C
e y C
C
a x a
−
−
=−
∂
=
∂
−
⇒
= − = ∑
將上式對 求偏導數
表示誤差值 這裡誤差的起因包括 和噪聲 而不僅僅是波形失真.](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-108-320.jpg)
![109
2
. ISI ,where
2 [ ] , 0, [ ] 0.
.
,
.( )
,
,
N
k k k i k i k
i N
k k i
i
k
k
k i
k i
k k i
e y a C x
E e x
e x
a
e
E e x
C
e x i N
−
=
−
−
−
−
− =
= − = −
∂
=
∂
≤
∑
要使均方誤差最小 應使上式等
表示誤差值 這裡誤差
於 即
抽頭增益的調整可以借
的起因包括 和噪聲 而不僅僅是波形失真.
從 可見
這就要求誤差 與均衡
助對誤差 和樣值 乘積的統計平均
器輸入
值
若這個平
樣值 應互不相關
這
均值不等
就 明
於零
說
則 , .
.
應通過增益調整使其向零值變化 直到使其等於零
統計平均器可以是一個求算術平均
止
的器件
為
3抽頭自適應均衡器原理方框圖
[ ]k k iE e x −](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-109-320.jpg)

![111
Summery
時時時時域均衡域均衡域均衡域均衡 → ISI↓
( )H ω′
有有有有 ISI
ݔݔݔݔ()ݐ
( )H ω ( )T ω
無無無無 ISI
ݕݕݕݕ()ݐ
有有有有誤差誤差誤差誤差
if equalizer
ISI
then ( ) IS
(( ) ( )( )
.
)
I
T TH H
y t
ω ωω ω′∋ =插入
滿足無 的頻域條件
在抽樣時刻上無
1
,
2 2
) ) ,
2 /
,
2
( )
( ) [
( )
(
( )
(
2
(
]
)
( )
22
(
(
)
(
(
)
)
) ( )B
B
i B
B
i B B B
B
B
B
i B
jnT
n T n B
B
n n
jnB B
n
i B
T
T
i i
T
T T T
T
T
T
i TH
T
C e
H
H
i
H
T
h t F C
H
T
t nT
T T
C e
i
H
T
T
T T
T
ω
π
ω
π π π
ω
π
π
ω
π
ω
δ
ππ ω
π
ω
ω ω
ω
ω
ω
ω
ω
ω ω
∞ ∞
− −
=−∞ =−∞
= ≤
+ + = ≤
= ≤
+
= ⇔
′ +
′
= = −
=
=
+
∑
∑
∑
∑ ∑
∑
帶入
是 為週期的函數
BB
B
TT
T
d
π
ω
π ω−∫
由hT(t)構造出equalizer的結構: 橫向濾波器
( ) ( )T n B
n
h t C t nTδ= −∑](https://image.slidesharecdn.com/digitalbasebandcommunication-180326143151/85/Digital-Baseband-Communication-111-320.jpg)



![RF Module Design - [Chapter 1] From Basics to RF Transceivers](https://cdn.slidesharecdn.com/ss_thumbnails/rfch1-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)







![Multiband Transceivers - [Chapter 1]](https://cdn.slidesharecdn.com/ss_thumbnails/ch1-150613070932-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)

![RF Module Design - [Chapter 2] Noises](https://cdn.slidesharecdn.com/ss_thumbnails/rfch2-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Circuit Design - [Ch3-1] Microwave Network](https://cdn.slidesharecdn.com/ss_thumbnails/ch3-1-150613064402-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 3] Linearity](https://cdn.slidesharecdn.com/ss_thumbnails/rfch3-150613070345-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 2] Noises and Linearities](https://cdn.slidesharecdn.com/ss_thumbnails/ch2-150613070933-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 4] Transceiver Architecture](https://cdn.slidesharecdn.com/ss_thumbnails/rfch4-150613070346-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)





![Multiband Transceivers - [Chapter 3] Basic Concept of Comm. Systems](https://cdn.slidesharecdn.com/ss_thumbnails/ch3-150613070933-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 4] Design Parameters of Wireless Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)

![Multiband Transceivers - [Chapter 5] Software-Defined Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)




![射頻電子 - [實驗第三章] 濾波器設計](https://cdn.slidesharecdn.com/ss_thumbnails/e3-150613065109-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)


![射頻電子 - [第五章] 射頻放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613065105-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)