This document provides an overview of analyzing slender structural members like rods, beams, shafts and columns. It outlines the basic logical steps to follow: 1) Make general and problem-specific modeling assumptions for geometry, loading, deformation and boundary conditions. 2) Apply the appropriate governing equations from elasticity. 3) Use an exact analytical or approximate numerical solution method. It then provides more details on modeling assumptions and solving for stresses and deflections in rods under axial loading as an example.

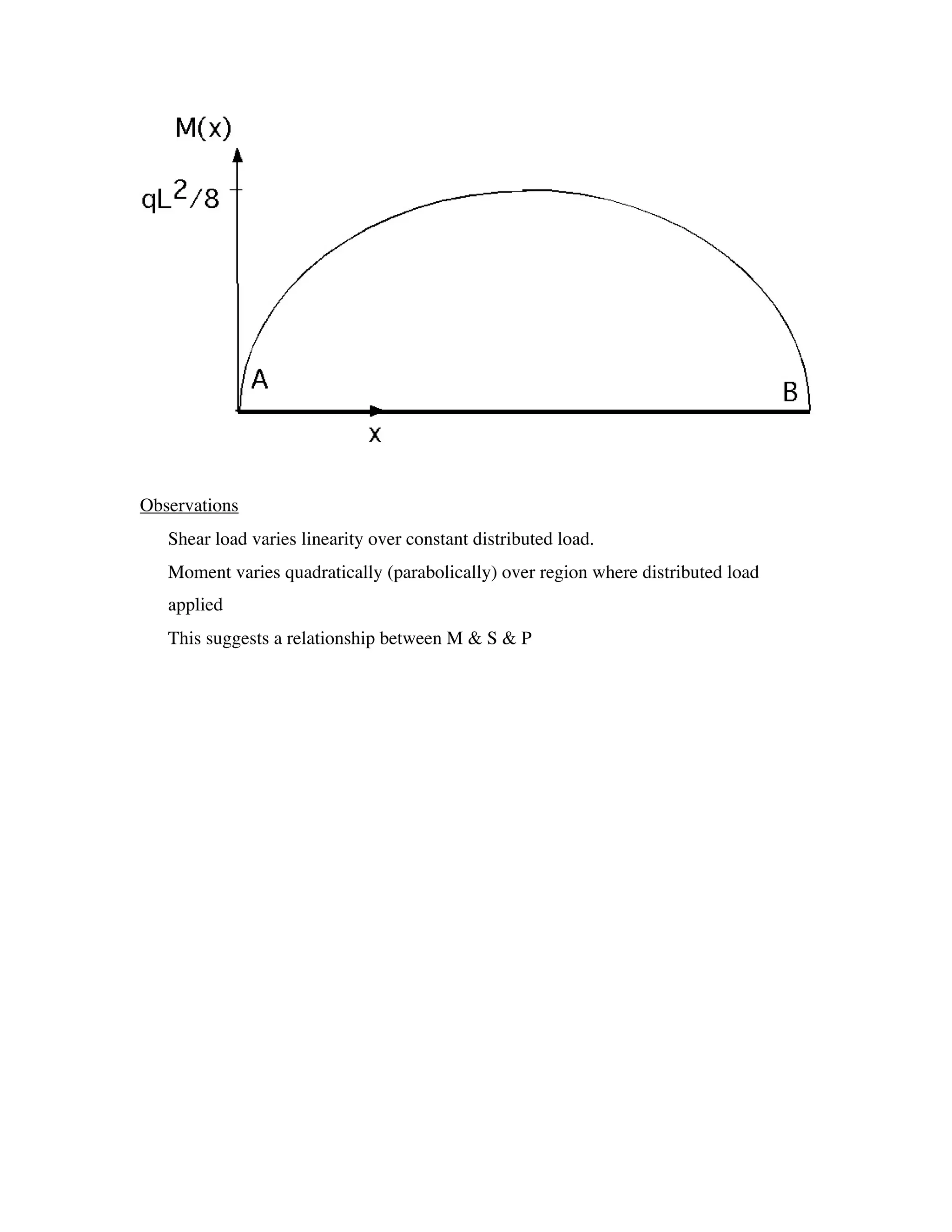
![Observations
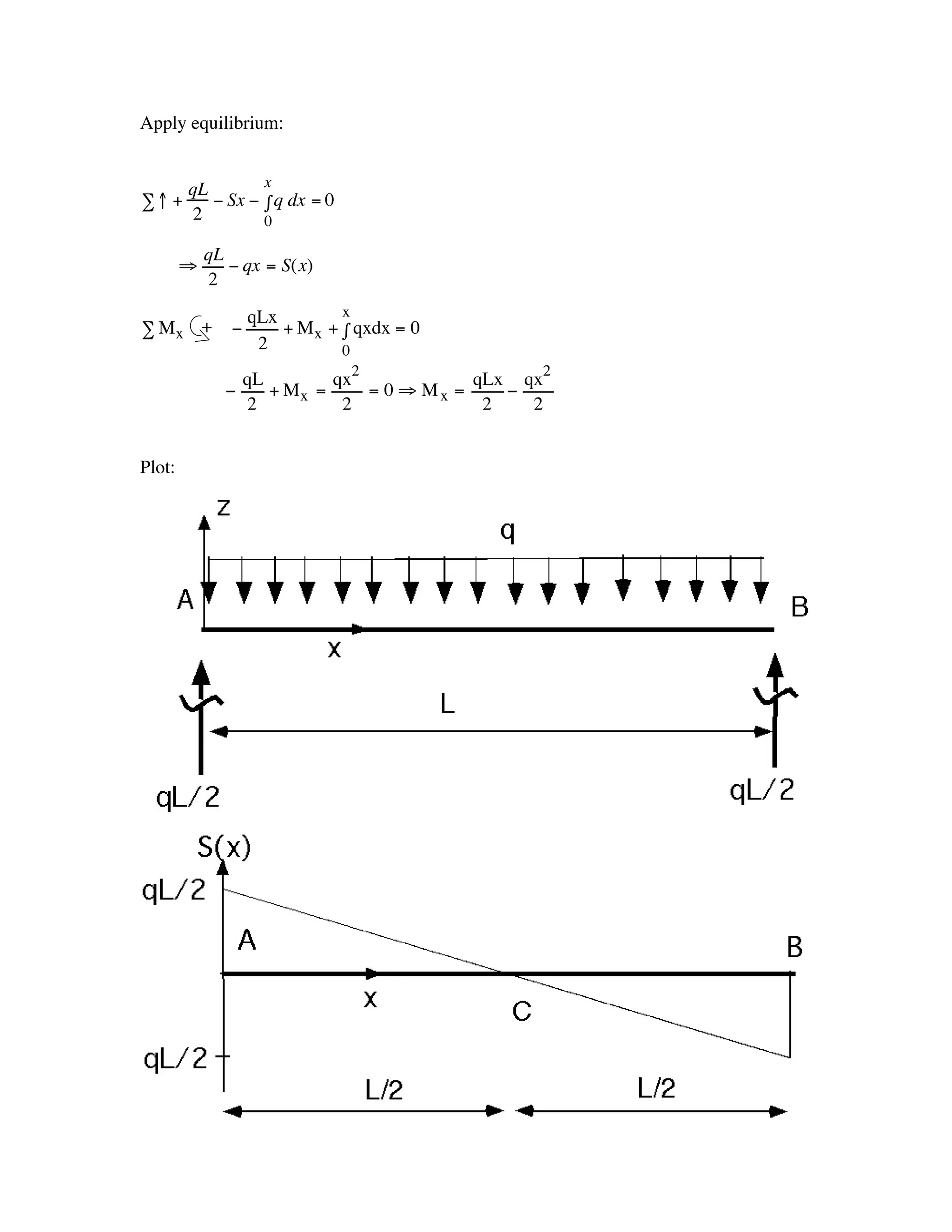
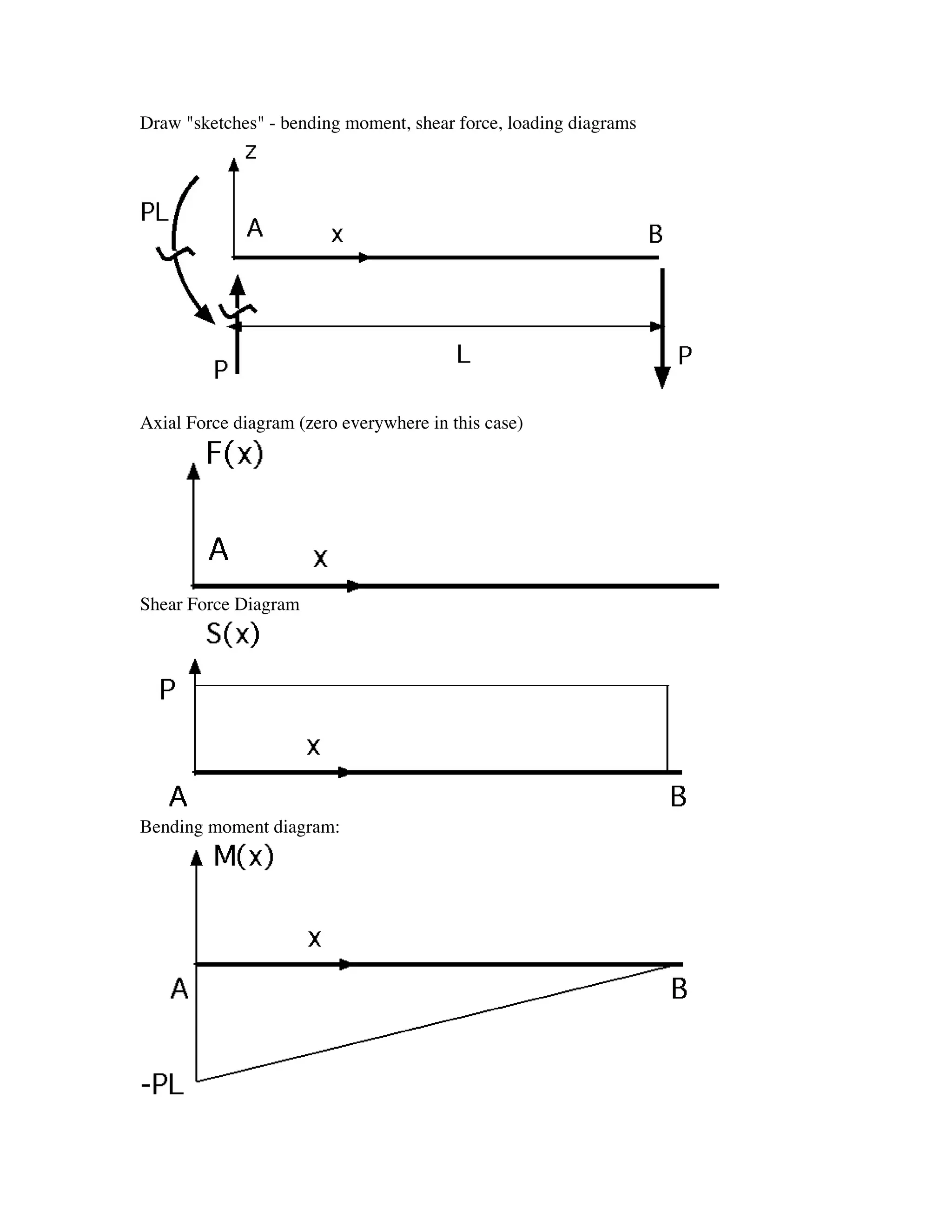
• Shear is constant between point loads
• Bending moment varies linearly between discrete loads.
• Discontinuities occur in S and in slope of M at point of application of concentrated
loads.
• Change in shear equals amount of concentrated loads.
• Values of S & M (and F) go to values of reactions at boundaries
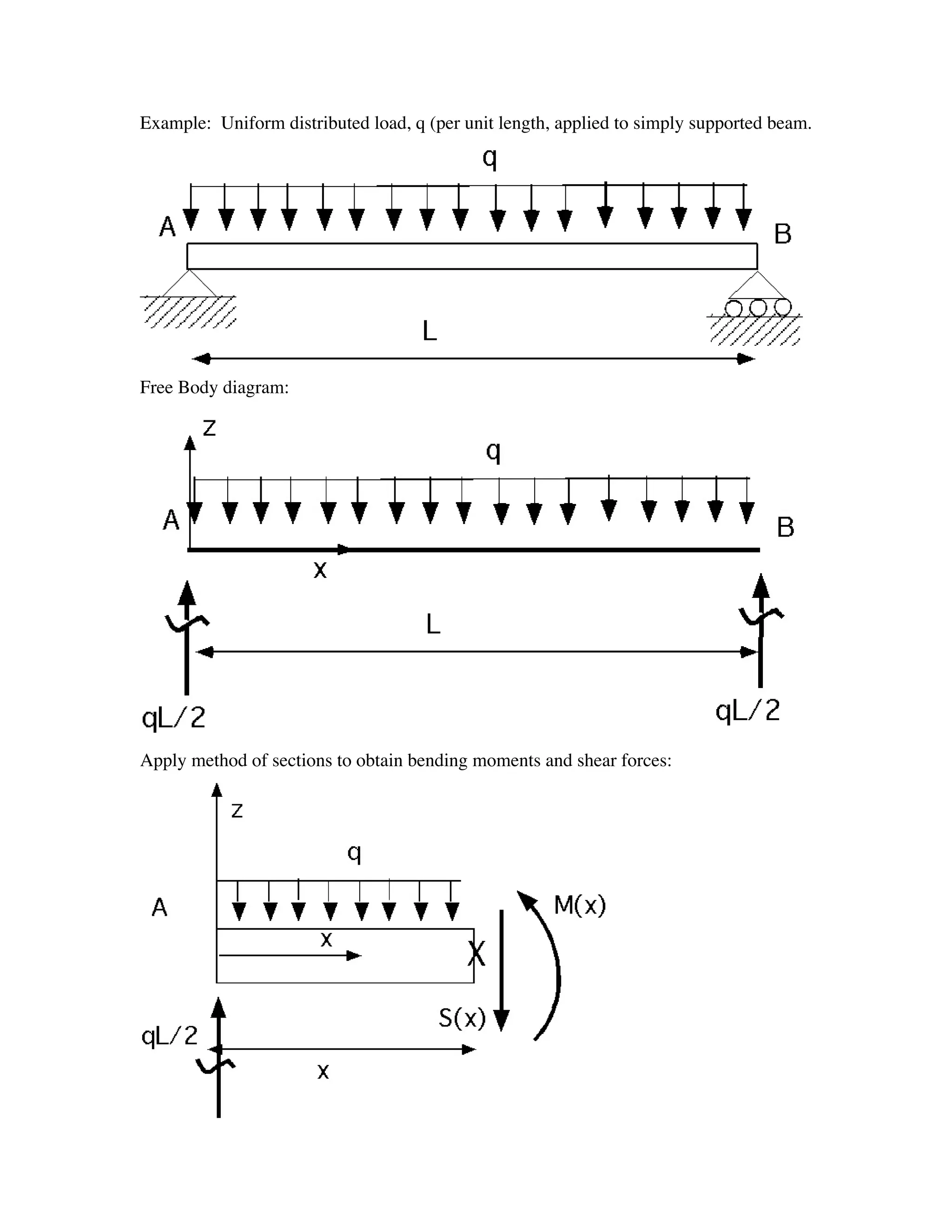
Distributed loads
e.g. gravity, pressure, inertial loading. Can be uniform or varying with position.
Ê x
q(x) = q q(x) = q0 Ë 1- ˆ fi= q0 @ x = 0, = 0@ x = L
L¯
[ q o ] = [force/length]
Deal with distributed loads in essentially the same way as for point loads.](https://image.slidesharecdn.com/bendinganddistributedloads-101227124233-phpapp01/75/Bending-and-distributed-loads-17-2048.jpg)