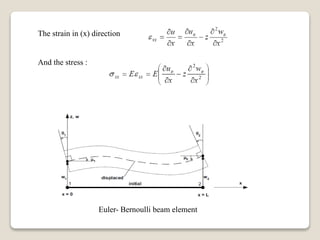
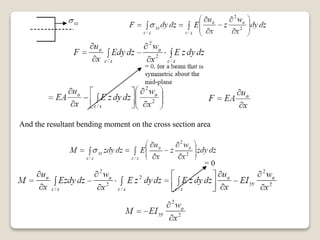
This document compares the Bernoulli-Euler beam theory and Timoshenko beam theory. [1] The Timoshenko beam theory accounts for transverse shear deformation, which the classical Bernoulli-Euler theory neglects. [2] The finite element models of the two theories are derived, with the Timoshenko model having a larger stiffness matrix that accounts for the additional degree of freedom from shear deformation. [3] An example problem of a simply supported beam is solved analytically and using finite elements to demonstrate the difference between the two theories.