1. This document outlines the syllabus for a mechanics and materials course, covering topics like statics, forces, moments, and equilibrium.
2. It provides instructions on how to solve problems, such as using SI units, labeling sketches, and showing work systematically.
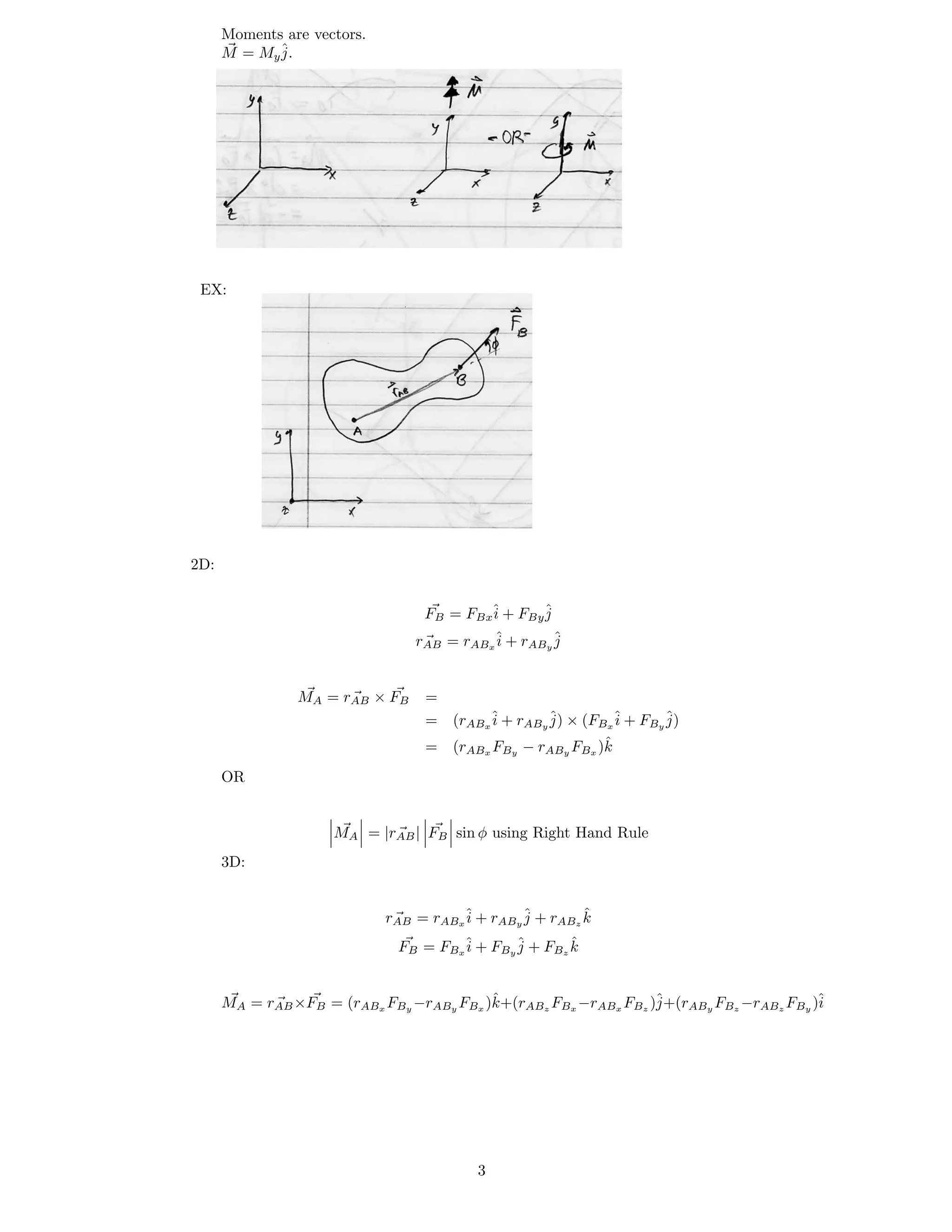
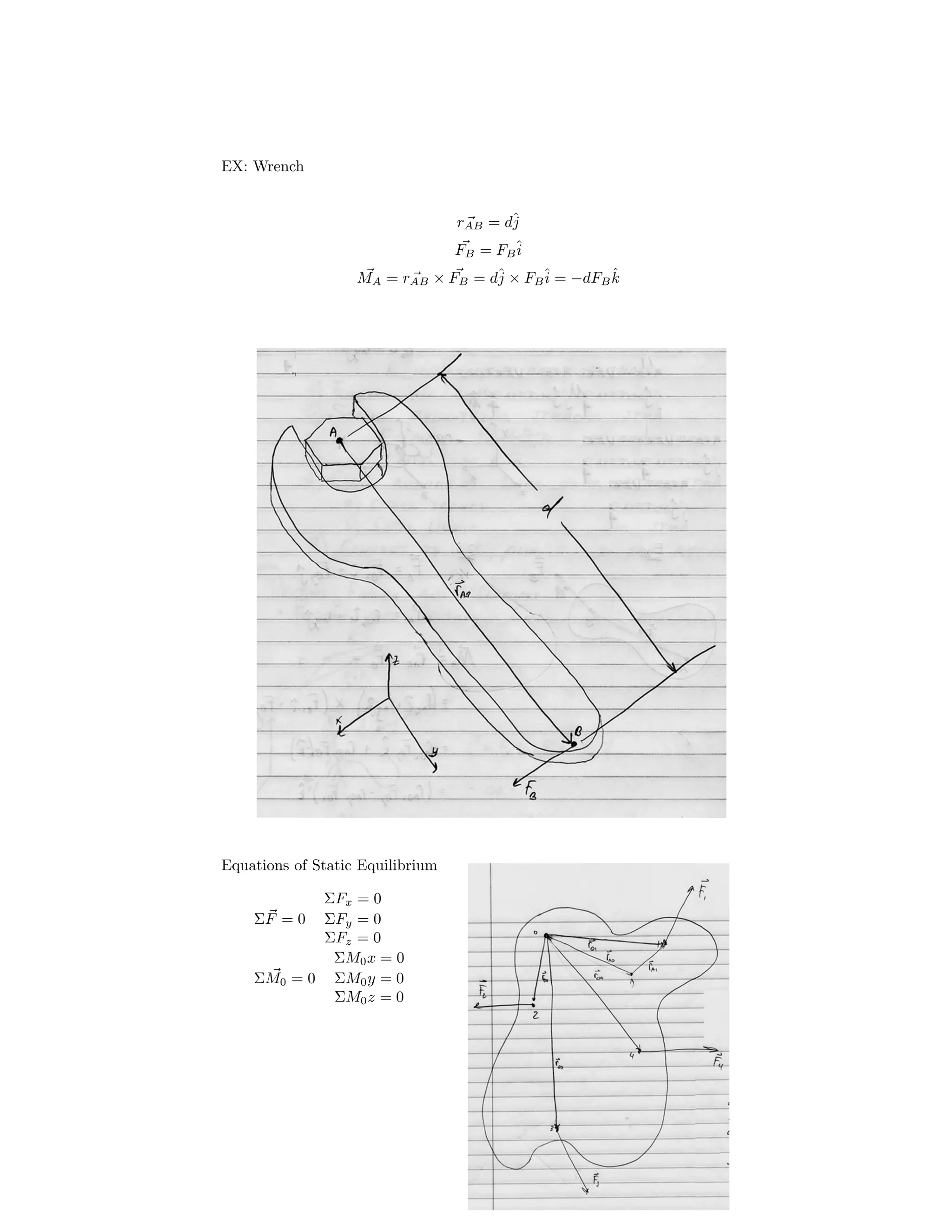
3. Key concepts discussed include vectors, forces as vectors, moments as vectors, and the equations of static equilibrium used to analyze systems in equilibrium.