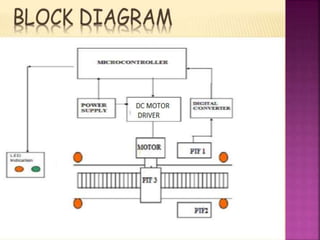
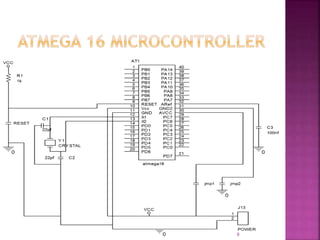
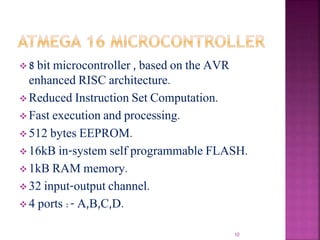
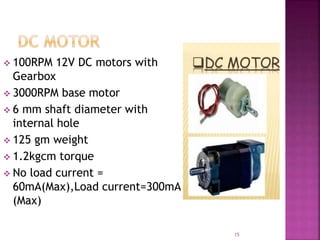
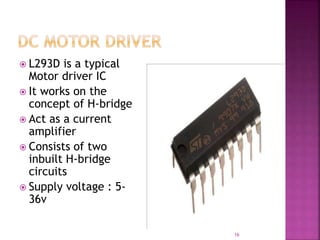
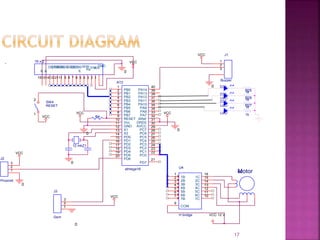
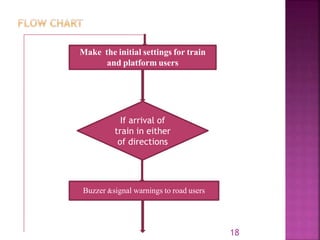
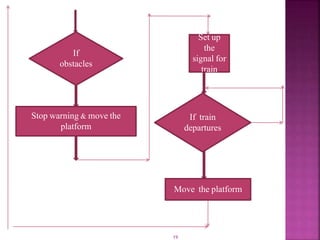
This document describes an automatic railway platform project used to open and close mobile platforms between train tracks. The system uses an Atmega16 microcontroller, proximity sensors, a DC motor driver and DC motor. It detects arriving and departing trains using proximity sensors and moves the platform accordingly for pedestrian safety. The automated design enhances safety for disabled or elderly pedestrians by avoiding the need to use staircases.


































































![automaticrailwaygatecontrolusingarduinouno-200115134737[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/automaticrailwaygatecontrolusingarduinouno-2001151347371-250826175600-5d686697-thumbnail.jpg?width=640&height=640&fit=bounds)












