Downloaded 466 times
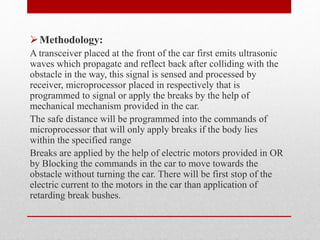
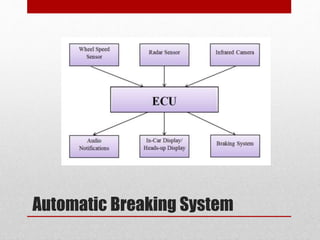

The document discusses an automatic braking system designed to prevent collisions by utilizing sensors to detect obstacles and an integrated microprocessor to activate brakes autonomously. It outlines the technology's significance, noting that it can reduce collision impacts and save lives as many drivers fail to brake in emergencies. The proposed system, initially tested on a prototype car, aims for further development to enhance its functionality in real vehicles.























































































