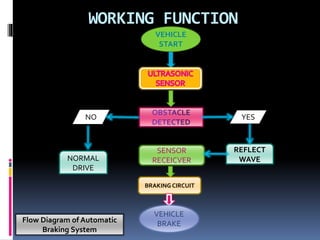
The document discusses the development of an automatic braking system guided by ultrasonic sensors to enhance vehicle safety by preventing accidents due to driver inattention. It covers the system's working mechanism, advantages and disadvantages, methodology for implementation, and future improvements such as enhanced obstacle detection. The project aims to provide pre-crash safety and improve the response time for braking in vehicles.