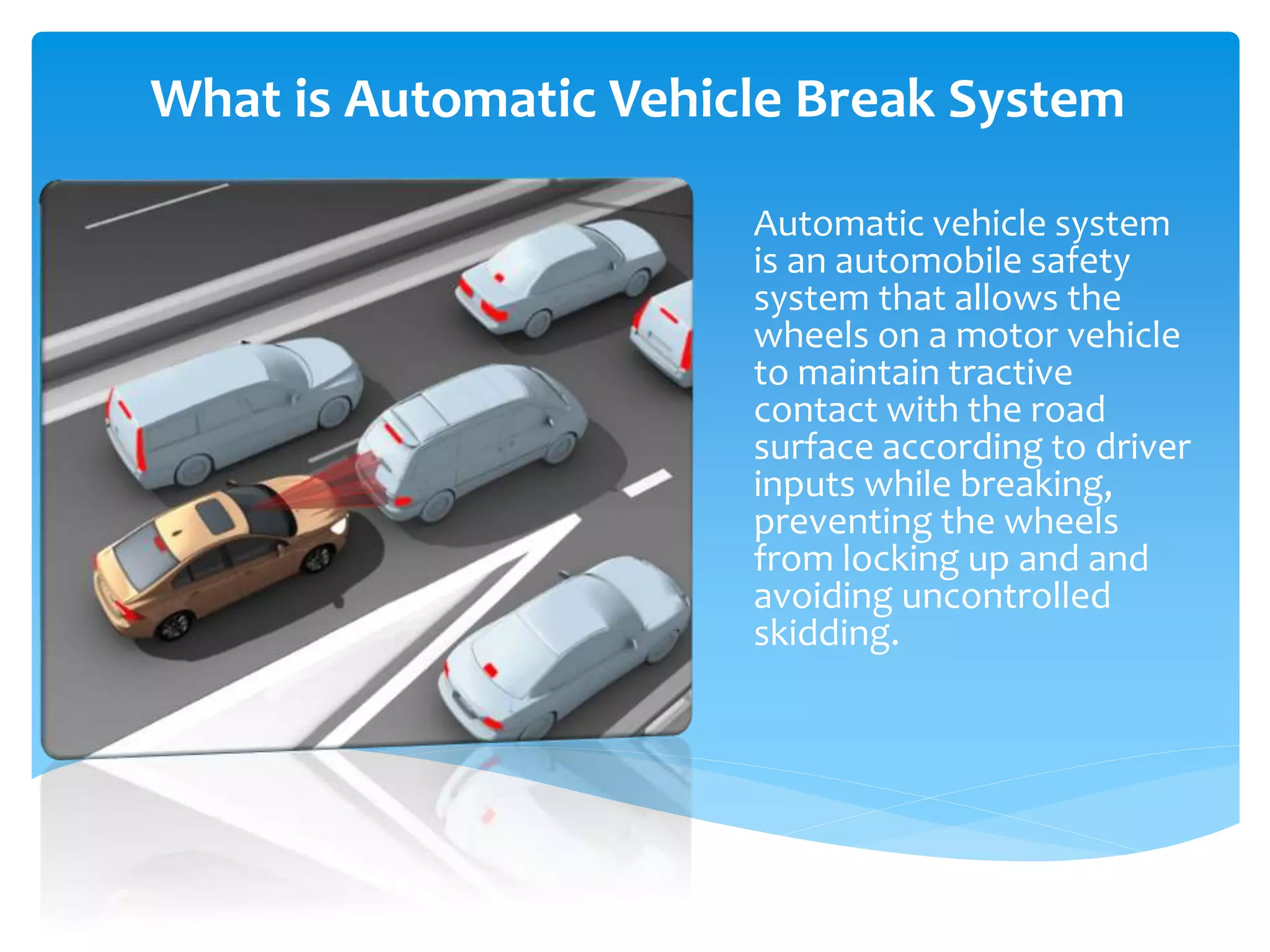
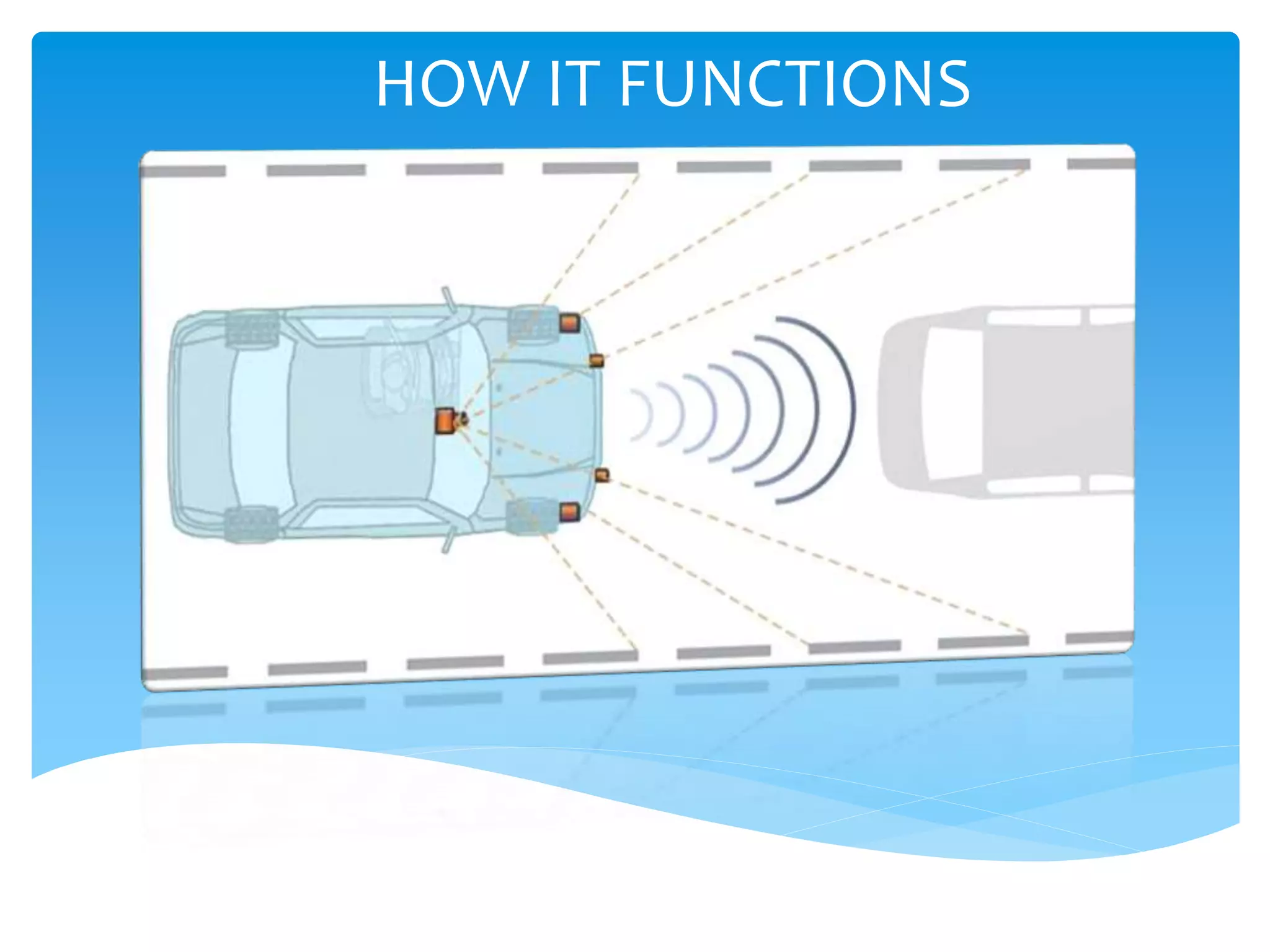
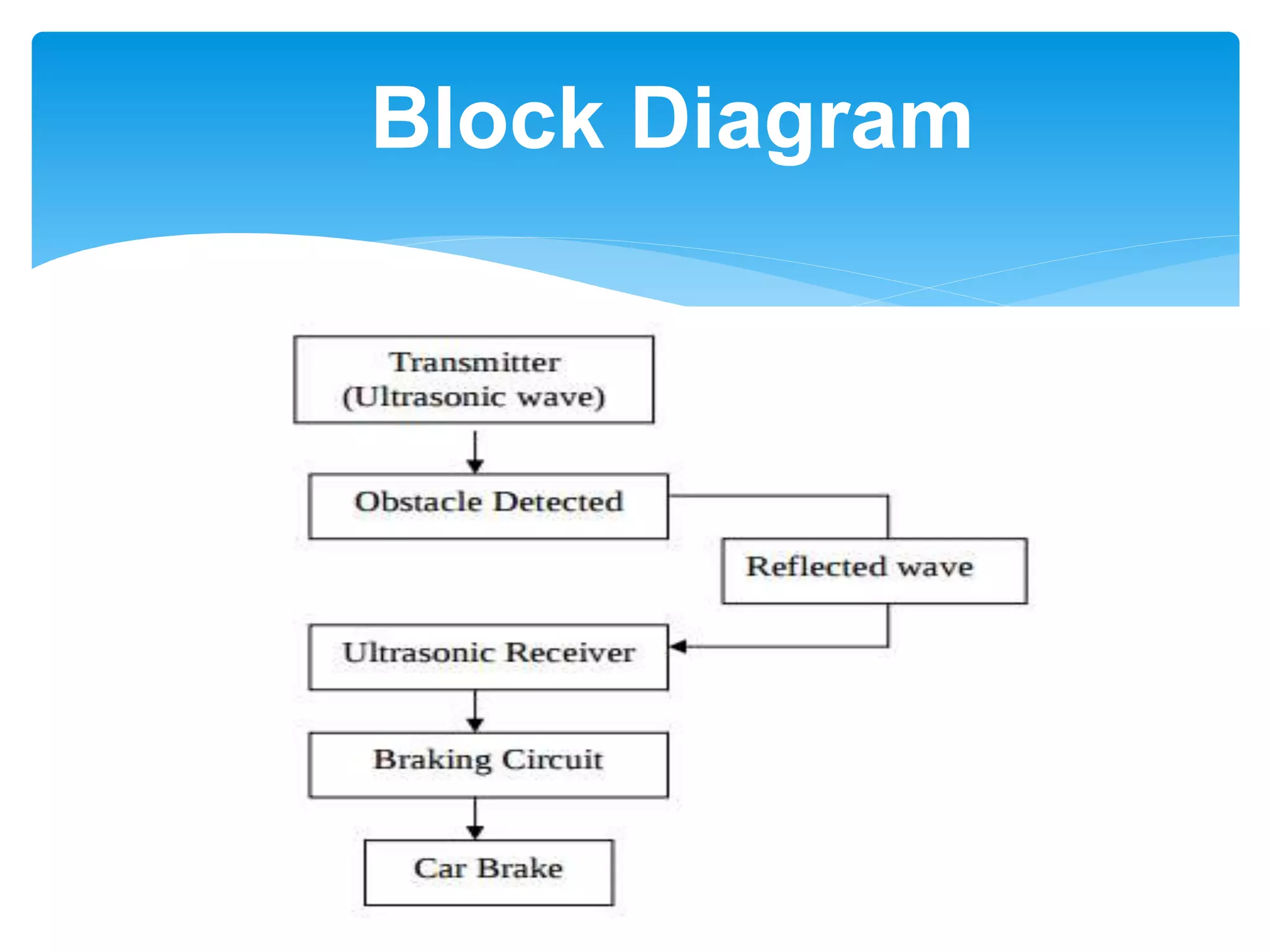
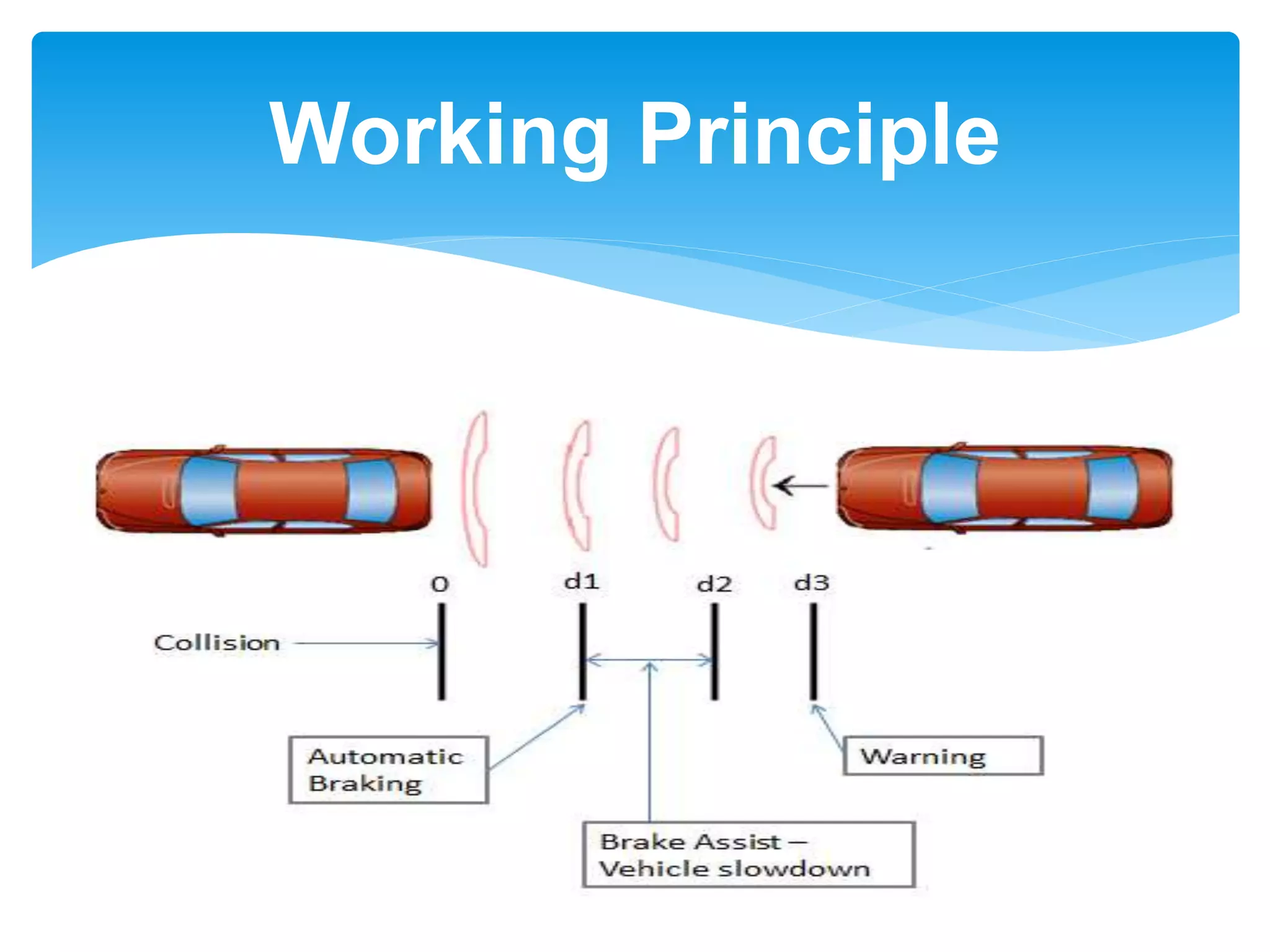
The document describes an ultrasonic automatic vehicle braking system for forward collision avoidance. The system uses an ultrasonic emitter and receiver to detect obstacles in front of the vehicle within a predetermined distance. It then uses an Arduino to control the brakes intermittently for safe braking to avoid collisions. The system is designed to automatically brake the vehicle if obstacles are sensed to address accidents caused by driver delays in braking. It functions by using ultrasonic waves to measure the distance to obstacles and trigger braking as needed. The system provides advantages like maintaining stability, helping inexperienced drivers, controlling steering to avoid collisions, and increasing safety.