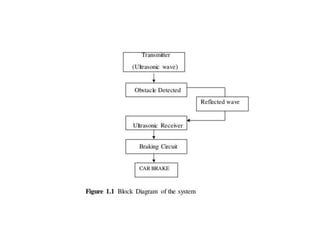
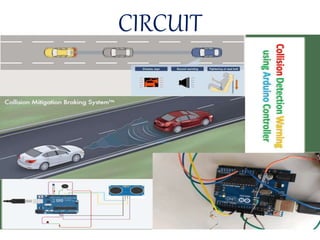
An autonomous emergency braking system can help reduce accidents by intervening to brake independently of the driver when critical situations are detected. The system uses ultrasonic sensors and a camera to measure the speed of vehicles ahead and activate the brakes if a collision is likely to occur due to the driver braking too late or unexpectedly. While this can help avoid accidents and reduce injury, some disadvantages are the increased cost and loss of total vehicle control. The system works by sensors detecting obstacles, a microprocessor calculating braking needs, and activating the brakes if needed to avoid a collision.