Downloaded 2,790 times

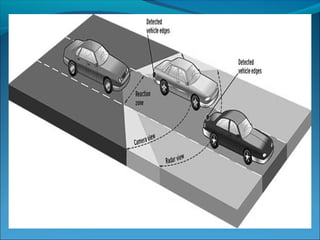



This document provides an outline and overview of adaptive cruise control (ACC) in vehicles. It discusses the history and development of cruise control and ACC. The key components of ACC are described including sensors, processors and actuators that allow the vehicle to automatically adjust speed to maintain a safe distance from other vehicles. The benefits of ACC include relieving driver fatigue on long trips and potential to reduce accidents rates, while limitations are the higher costs and potential to encourage driver inattention. Future developments may include vehicle-to-vehicle communication to allow for cooperative adaptive cruise control systems.



































































