Downloaded 670 times
![Prepared by: Dr. rer. nat. Ashraf Aboshosha EAEA, NCRRT, Engineering Dept. www.icgst.com, www.icgst-amc.com [email_address] Tel.: 0020-12-1804952 Fax.: 0020-2-24115475 Mechatronics: Education, Research & Development](https://image.slidesharecdn.com/mechatronics-100505034402-phpapp02/85/Mechatronics-1-320.jpg)
![Prepared by: Dr. rer. nat. Ashraf Aboshosha EAEA, NCRRT, Engineering Dept. www.icgst.com, www.icgst-amc.com [email_address] Tel.: 0020-12-1804952 Fax.: 0020-2-24115475 Mechatronics: Education, Research & Development](https://image.slidesharecdn.com/mechatronics-100505034402-phpapp02/75/Mechatronics-1-2048.jpg)

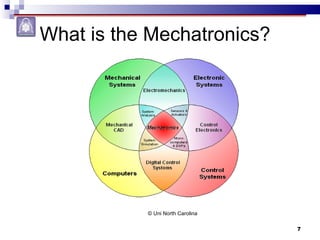
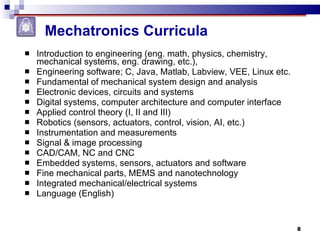
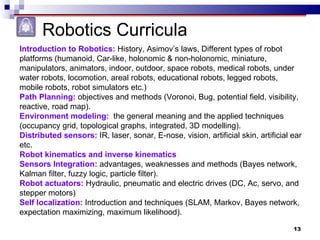
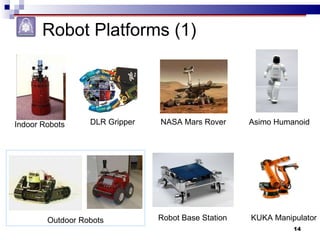
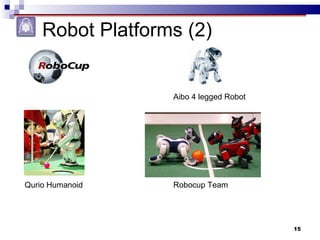
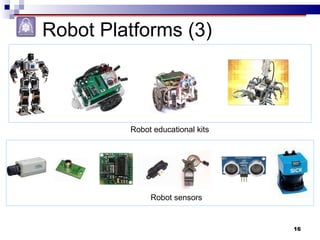


The document discusses mechatronics education, research, and development. It proposes establishing curricula and guidelines for mechatronics programs, preparing a list of required lab equipment, and offering educational and training courses. It also suggests developing a strategic research plan, scheduling academic activities, and linking education, research, and industry through surveys of job markets, standards, and automation demands. Finally, it provides examples of mechatronics, embedded systems, and robotics curricula and lab activities that integrate mechanical, electrical, computing, and control disciplines.