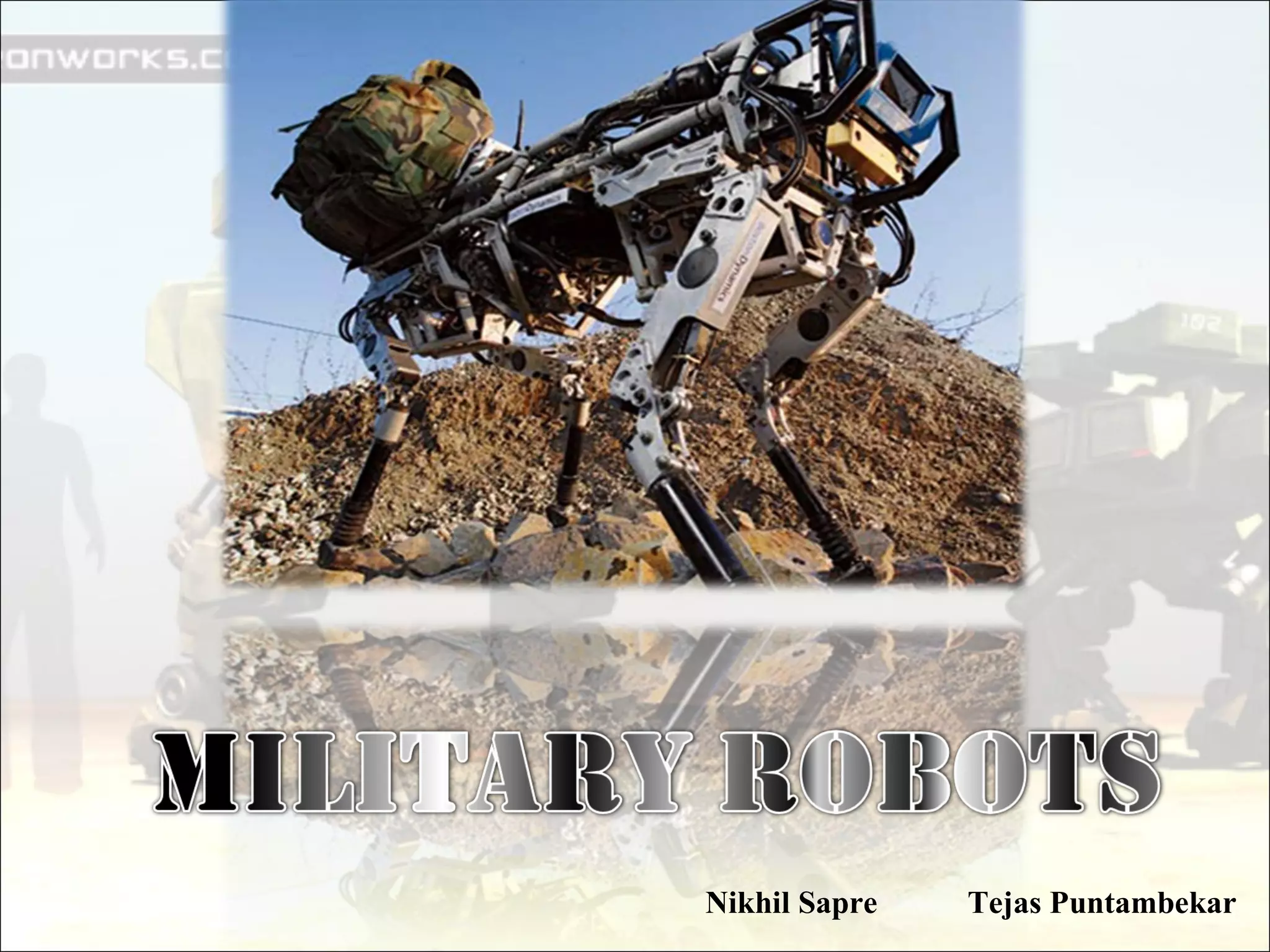
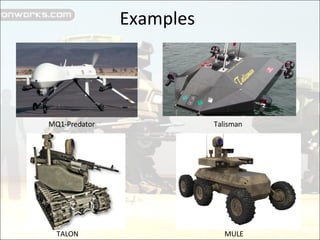
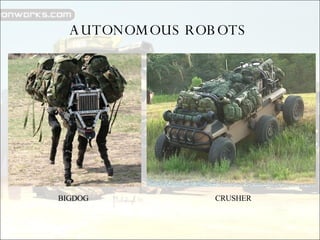
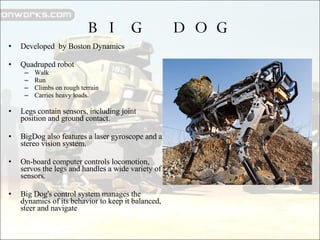
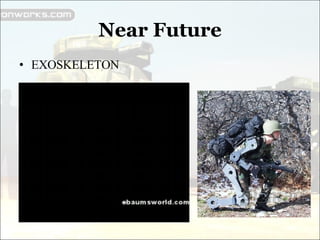
The document discusses the need for and types of military robots. It describes examples like the MQ1-Predator drone and BIGDOG quadruped robot. The document outlines research objectives like developing more autonomous robots that can help soldiers with dangerous tasks. Challenges include communication, power storage, navigation, and dexterous manipulation. Near-future applications may include exoskeletons to augment a soldier's abilities.