To learn the internal architecture and programming of an embedded processor.
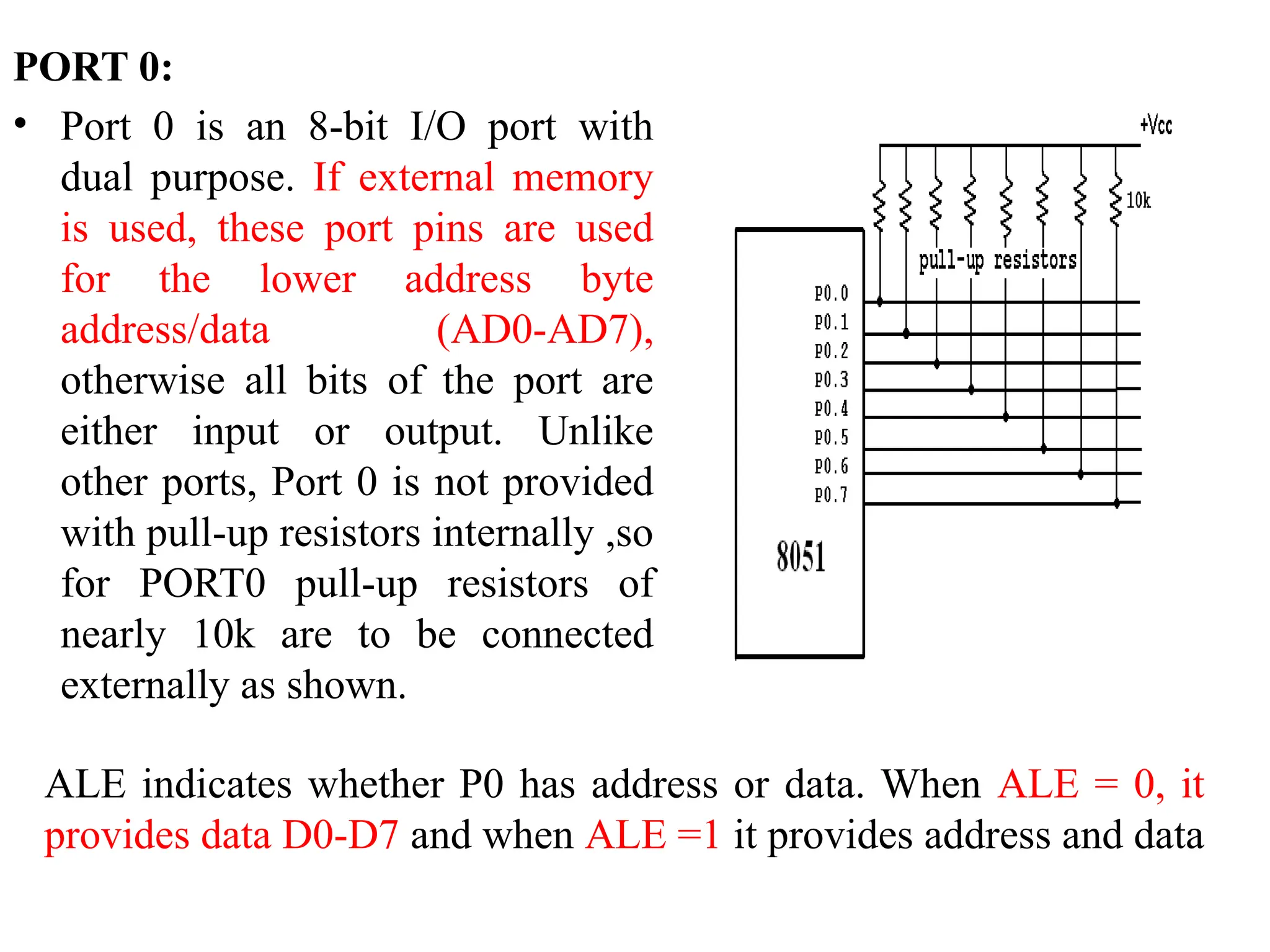
To introduce interfacing I/O devices to the processor.
To introduce the evolution of the Internet of Things (IoT).
To build a small low-cost embedded and IoT system using Arduino/Raspberry Pi/ open platform.
To apply the concept of Internet of Things in real world scenario.