Download as PDF, PPTX
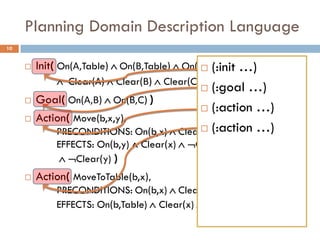
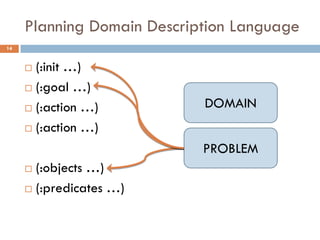
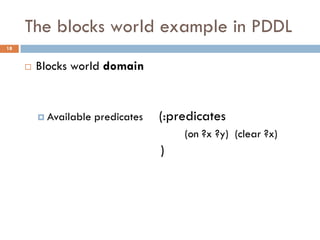
![STRIPS planning
6
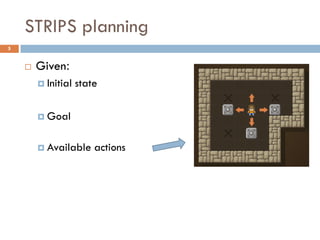
Given:
Initial state
Goal
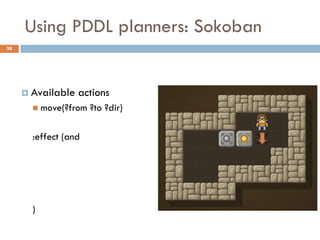
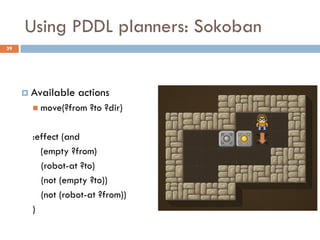
Available actions
Find:
A sequence of actions that achieves the goal
E.g.: [Left, Down, Left, Up, …]](https://image.slidesharecdn.com/aigames-lecture3-part1-121022052209-phpapp02/85/Intro-to-AI-STRIPS-Planning-Applications-in-Video-games-Lecture3-Part1-6-320.jpg)
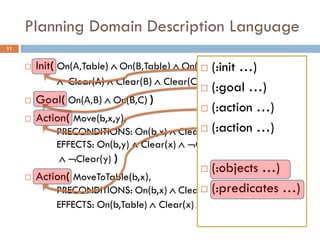
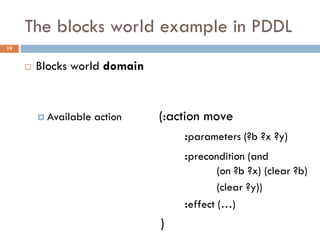
![Using PDDL planners
53
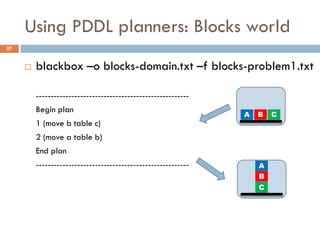
FastDownward [Helmert 2006]
Introduced a new type of heuristic that is not based on
an empty list of negative actions
Efficient implementation of all notable forward search
methods and heuristics (including the more recent ones)
Requires a number of preprocessing steps that
transforms the STRIPS planning problem…](https://image.slidesharecdn.com/aigames-lecture3-part1-121022052209-phpapp02/85/Intro-to-AI-STRIPS-Planning-Applications-in-Video-games-Lecture3-Part1-53-320.jpg)
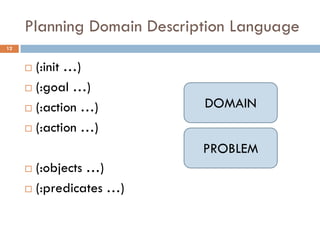
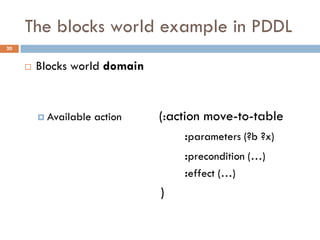
![Using PDDL planners
54
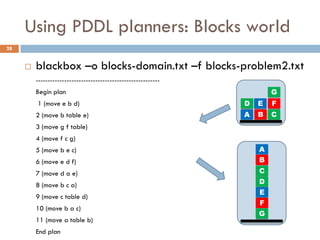
FastDownward [Helmert 2006]
Introduced a new type of heuristic that is not based on
an empty list of negative actions
Efficient implementation of all notable forward search
methods and heuristics (including the more recent ones)
Requires a number of preprocessing steps that
transforms the STRIPS planning problem…
Can be used as a framework to evaluate forward
search planning methods](https://image.slidesharecdn.com/aigames-lecture3-part1-121022052209-phpapp02/85/Intro-to-AI-STRIPS-Planning-Applications-in-Video-games-Lecture3-Part1-54-320.jpg)
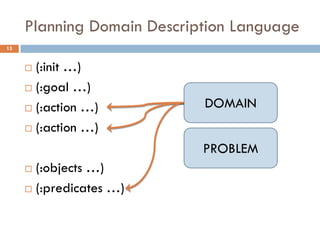
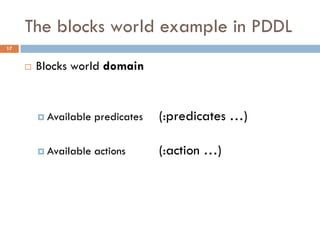
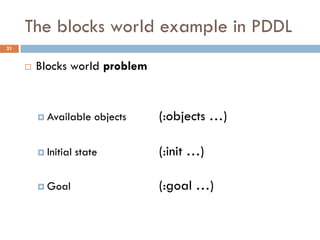
![Using PDDL planners
55
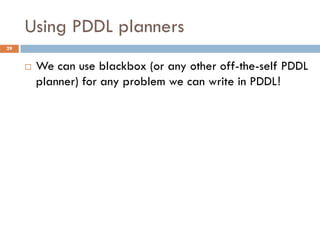
FastDownward [Helmert 2006]
translate/translate.py sokoban-domain.txt
sokoban.problem.txt
preprocess/preprocess < output.sas
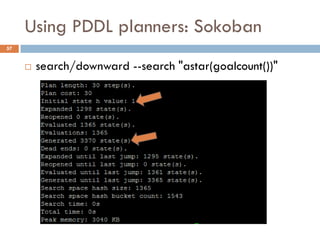
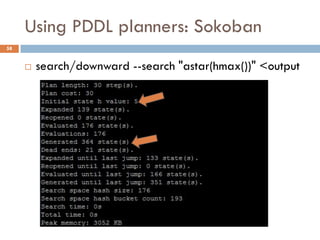
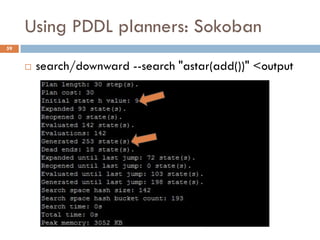
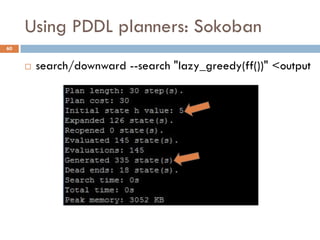
search/downward --search SearchConfiguration < output
http://www.fast-downward.org](https://image.slidesharecdn.com/aigames-lecture3-part1-121022052209-phpapp02/85/Intro-to-AI-STRIPS-Planning-Applications-in-Video-games-Lecture3-Part1-55-320.jpg)

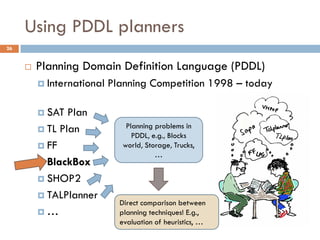
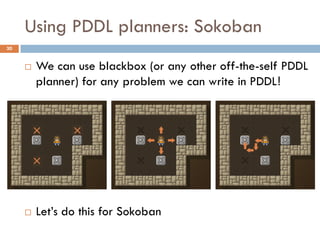
This document provides an introduction to AI strips planning, primarily in the context of applications to video games. It covers a variety of topics including the Planning Domain Definition Language (PDDL), methods for solving planning problems, and employs practical examples like the Sokoban game and the blocks world domain. It discusses planning techniques, their evaluation, and offers insights into the process of building custom PDDL planners.