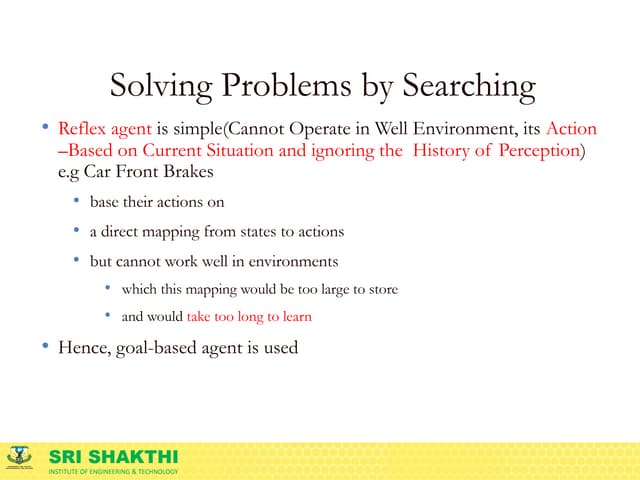
The document discusses various approaches to artificial intelligence planning, including state-space planning and plan-space planning. State-space planning formulates finding a plan as a search through the space of possible states, using either forward progression search or backward regression search. Plan-space planning formulates finding a plan as a search through the space of possible partial plans, starting with an initial partial plan and iteratively improving it. Specific planning techniques discussed include STRIPS planning, which represents states and actions using logical predicates, and progression and regression planners, which use forward and backward search respectively through the state space.






![CPM: Critical Path Method
Start
[0,0]
AddEngine1
30
[0,15]
AddWheels1
30
[30,45]
10
Inspect1
[60,75]
Finish
[85,85]
10
Inspect2
[75,75]
15
AddWheels2
[60,60]
60
AddEngine2
[0,0]
AddEngine1
AddWheels1
Inspect1
AddWheels2
Inspect2
AddEngine2
0 10 20 30 40 50 60 70 80 90
7](https://image.slidesharecdn.com/aiplanning-230403063436-114b2d1d/85/AI_Planning-pdf-7-320.jpg)