The document discusses Gaussian noise, which refers to statistical noise that follows a normal distribution. It is commonly found in digital images, telecommunications systems, and other contexts. Some key points made in the document include:
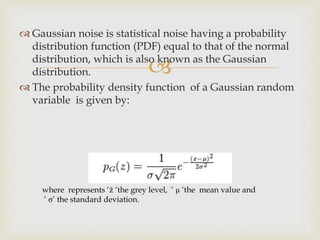
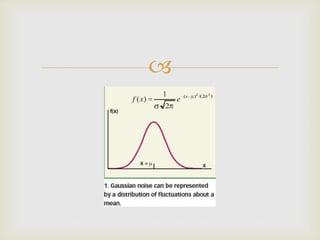
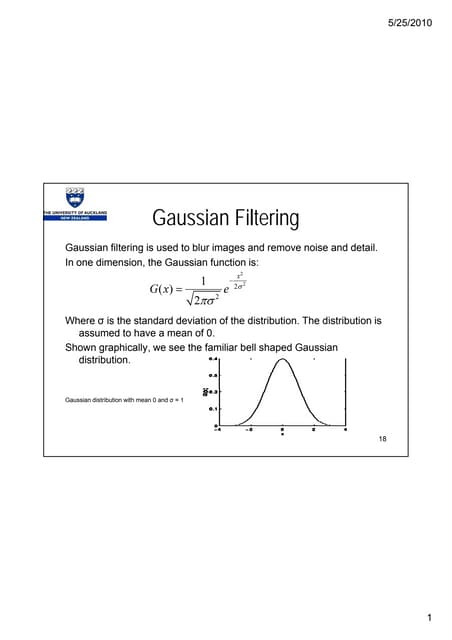
- Gaussian noise arises from natural sources like thermal vibrations and has a probability density function given by the normal distribution.
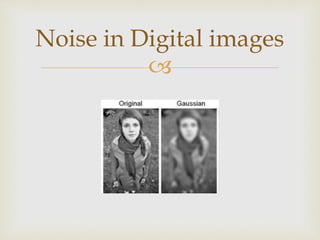
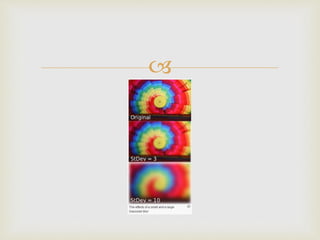
- In digital images, it provides a good model for sensor and transmission noise and can be reduced using spatial filters, though this may also blur details.
- It is commonly used to model thermal noise in communication channels, where it is assumed to be additive, white, and have a Gaussian distribution.
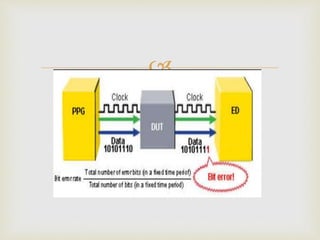
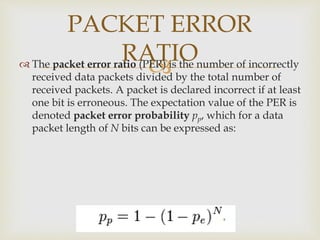
- Bit error rate and packet error ratio are measures of noise that indicate the need