Download as PDF, PPTX

!["...the term affordance refers to the perceived and
actual properties of the thing, primarily those
fundamental properties that determine just how the
thing could possibly be used. [...] Affordances
provide strong clues to the operations of things.
Plates are for pushing. Knobs are for turning. Slots
are for inserting things into. Balls are for throwing or
bouncing. When affordances are taken advantage of,
the user knows what to do just by looking: no
picture, label, or instruction needed."
(Norman, The Psychology of Everyday Things 1988, p.9)](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-32-2048.jpg)

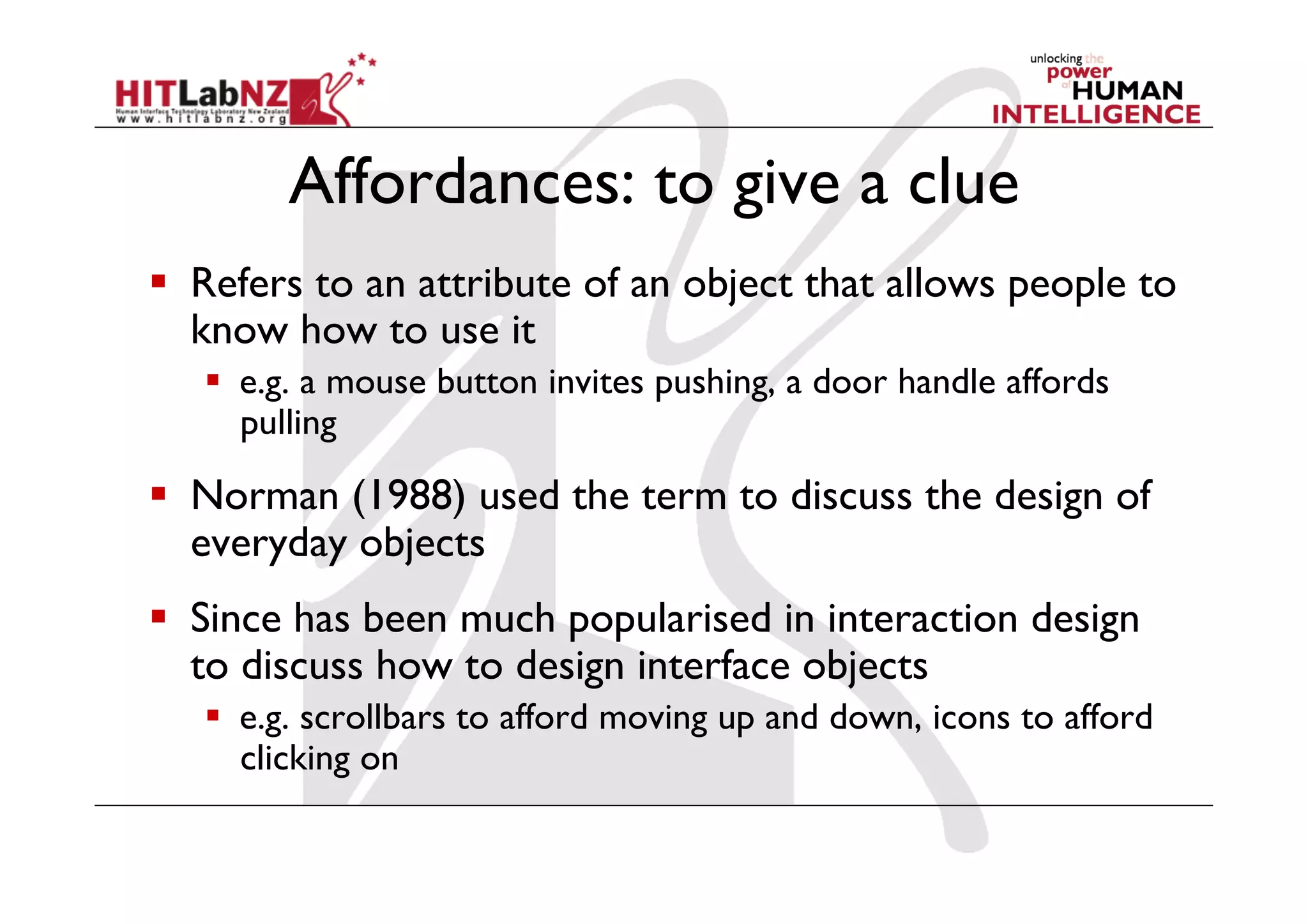
![Mouse Interaction
Compute the list of nodes under the clicked position
Invoke an action on nodes that are hit, e.g. select, delete
case osgGA::GUIEventAdapter::PUSH:
osgViewer::View* view = dynamic_cast<osgViewer::View*>(&aa);
osgUtil::LineSegmentIntersector::Intersections intersections;
// Clear previous selections
for (unsigned int i = 0; i < targets.size(); i++) {
targets[i]->setSelected(false);
}
// Find new selection based on click position
if (view && view->computeIntersections(ea.getX(), ea.getY(), intersections)) {
for (osgUtil::LineSegmentIntersector::Intersections::iterator iter = intersections.begin();
iter != intersections.end(); iter++) {
if (Target* target = dynamic_cast<Target*>(iter->nodePath.back())) {
std::cout << "HIT!" << std::endl;
target->setSelected(true);
return true;
}
}
}
break;](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-69-2048.jpg)
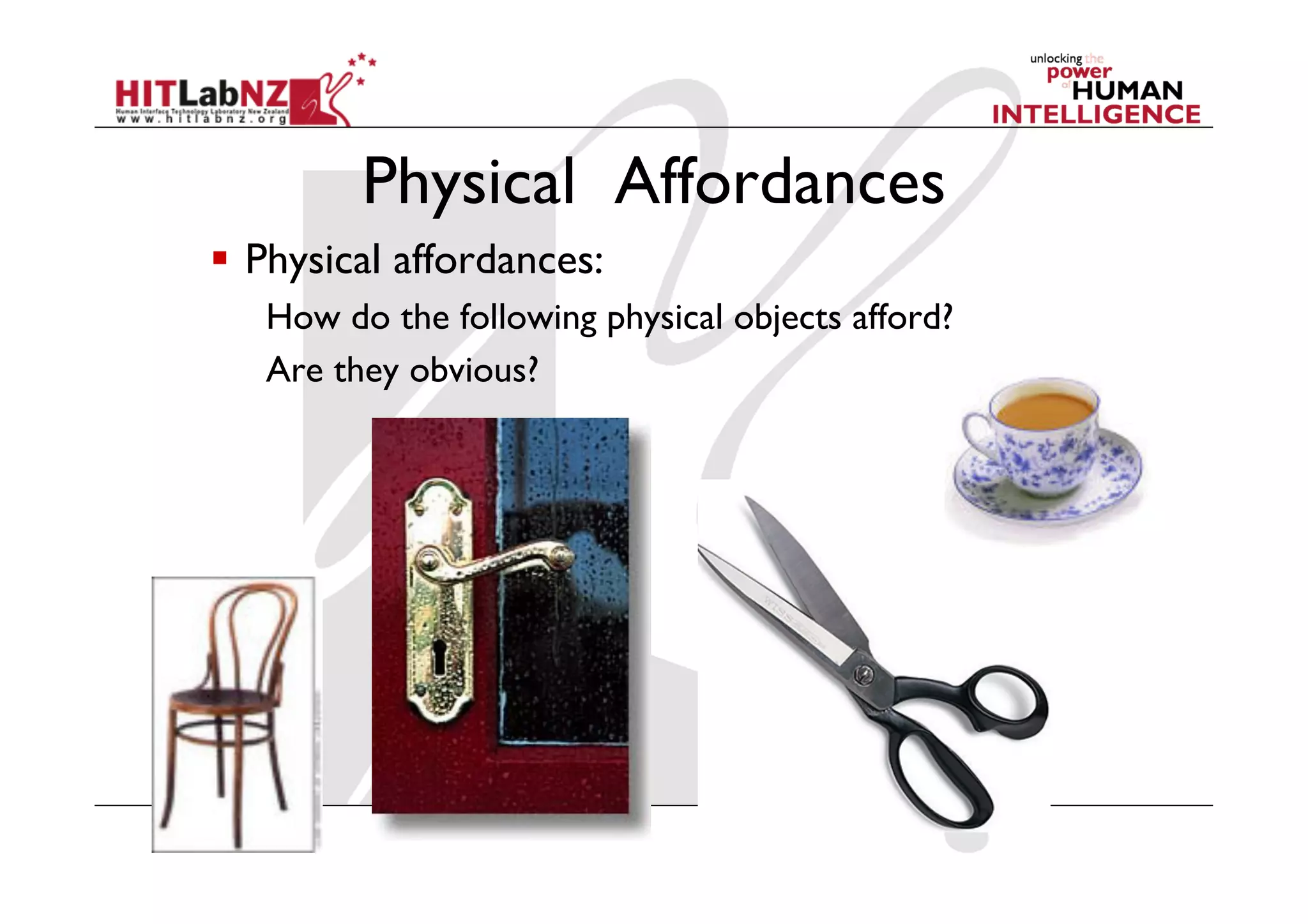
![Range-based Interaction
Sample File: RangeTest.c
/* get the camera transformation */
arGetTransMat(&marker_info[k], marker_center,
marker_width, marker_trans);
/* find the range */
Xpos = marker_trans[0][3];
Ypos = marker_trans[1][3];
Zpos = marker_trans[2][3];
range = sqrt(Xpos*Xpos+Ypos*Ypos+Zpos*Zpos);](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-87-2048.jpg)
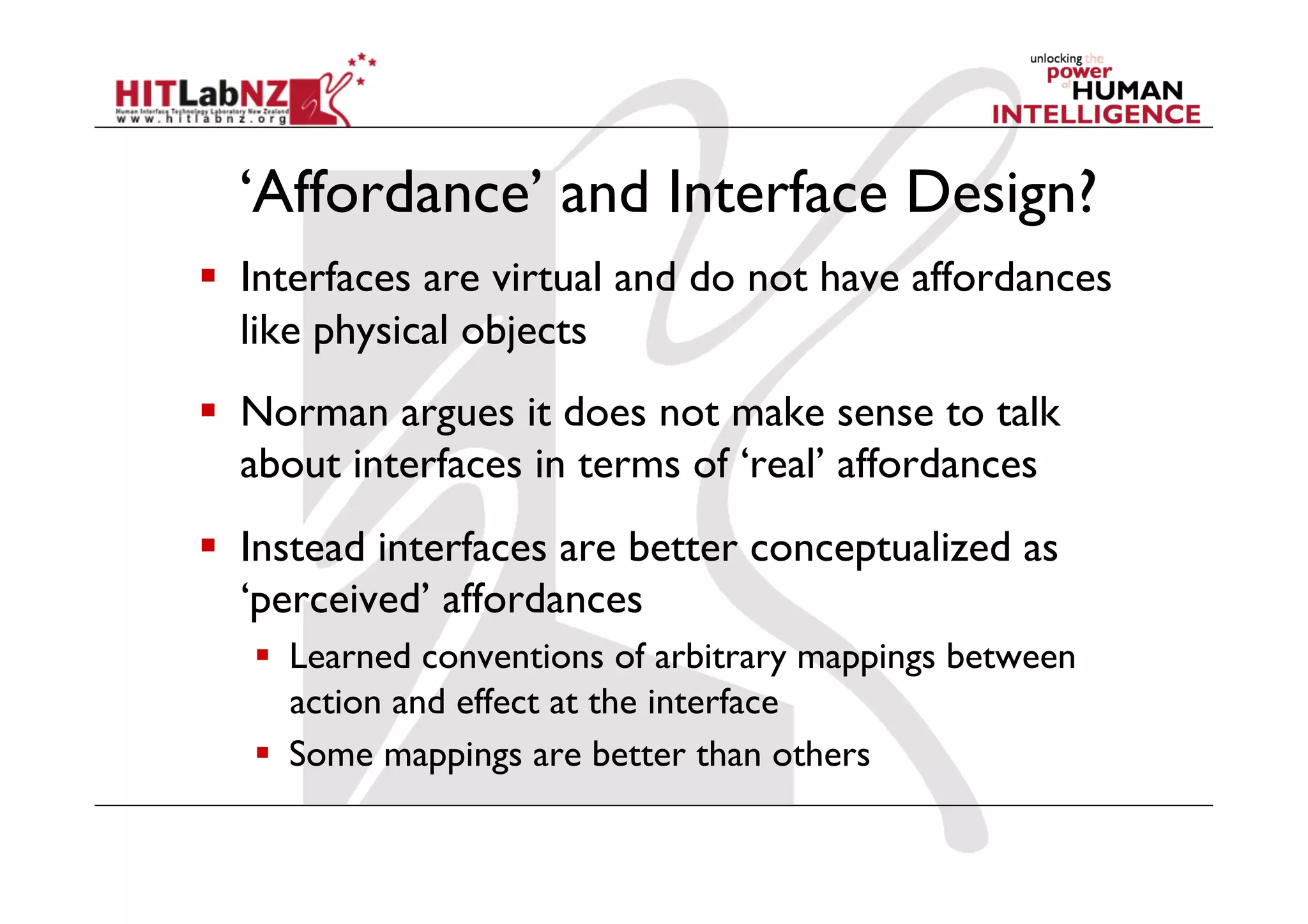
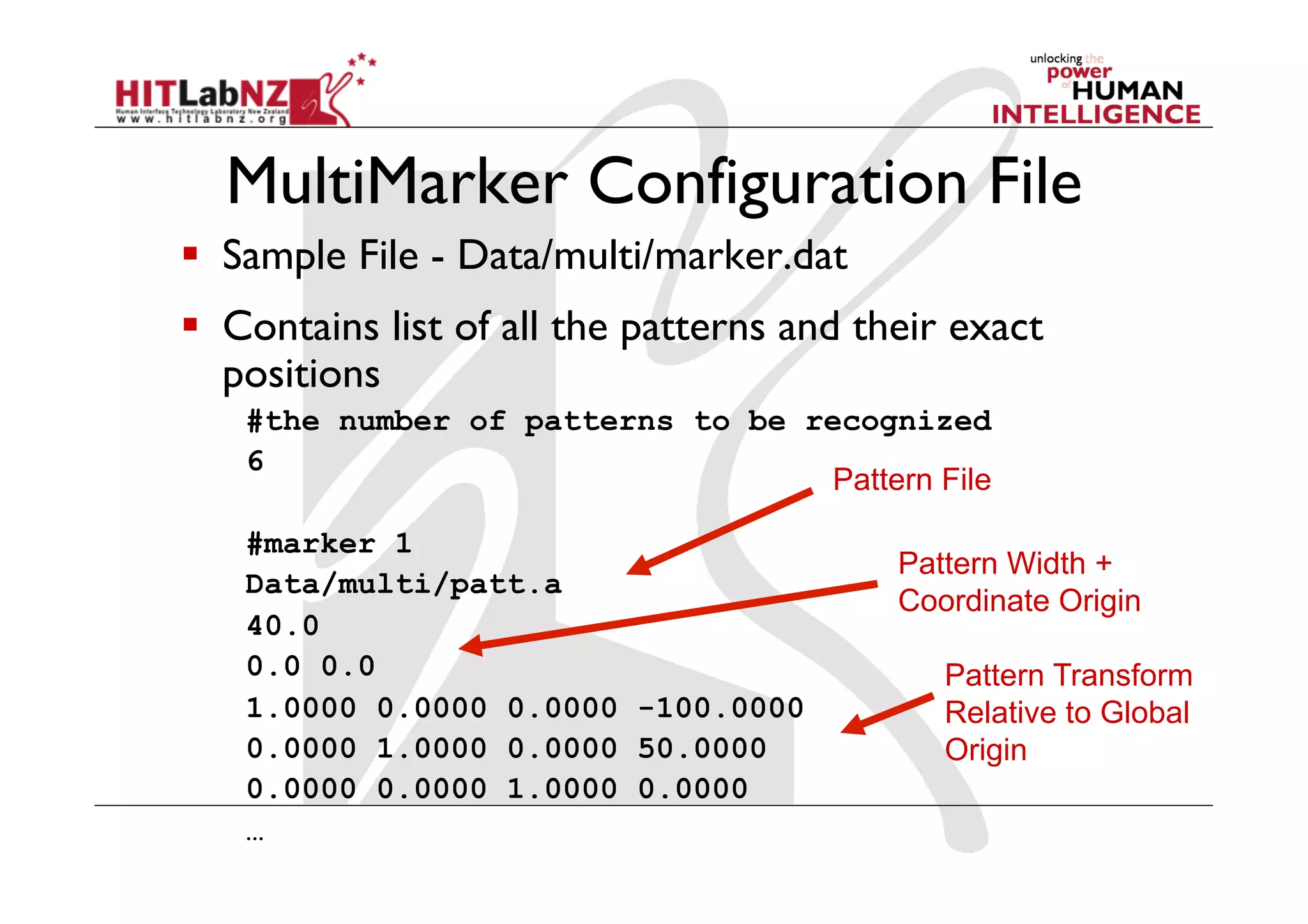
![Loading Multiple Patterns
Sample File: LoadMulti.c
Uses object.c to load
Object Structure
typedef struct {
char name[256];
int id;
int visible;
double marker_coord[4][2];
double trans[3][4];
double marker_width;
double marker_center[2];
} ObjectData_T;](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-88-2048.jpg)
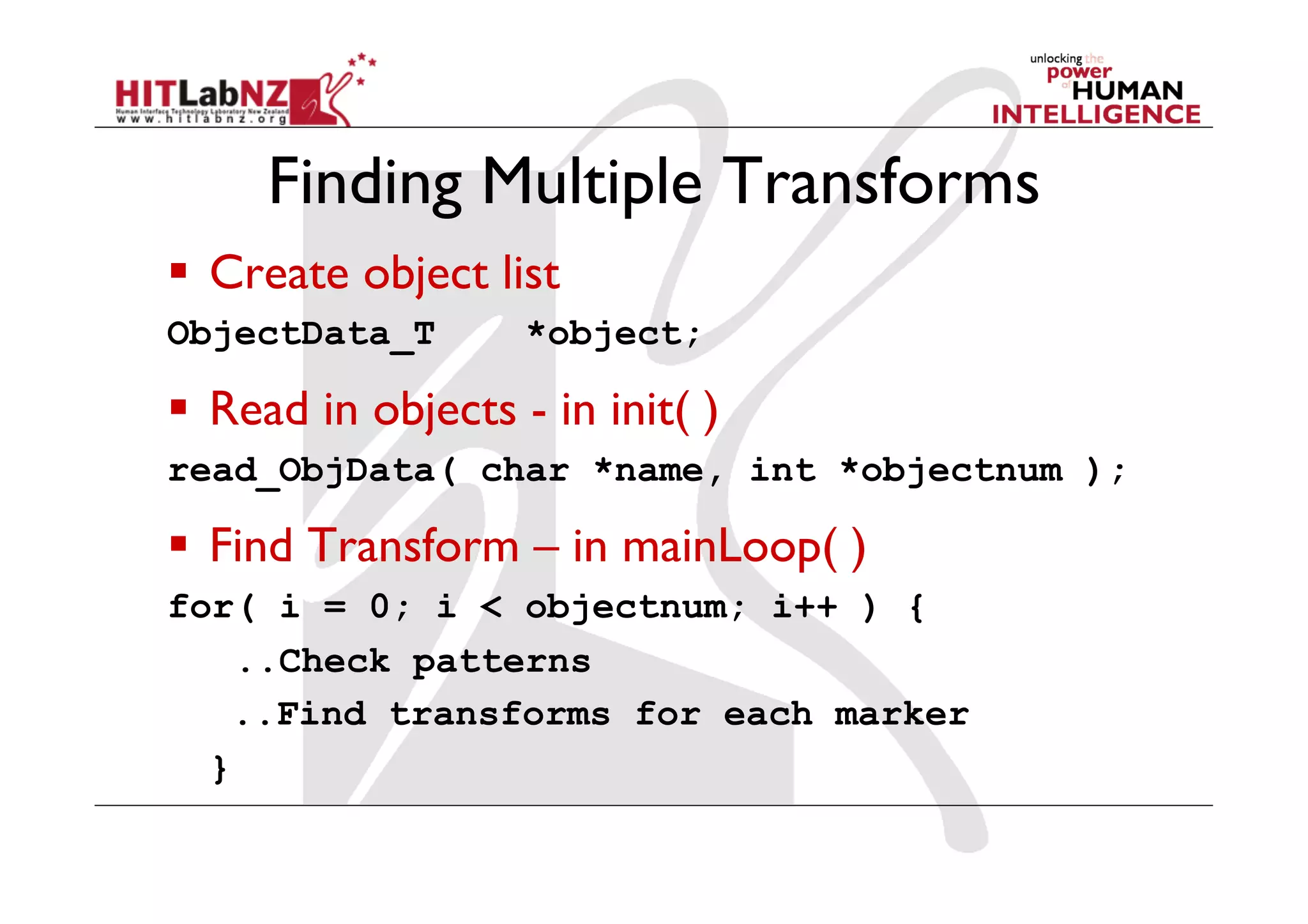
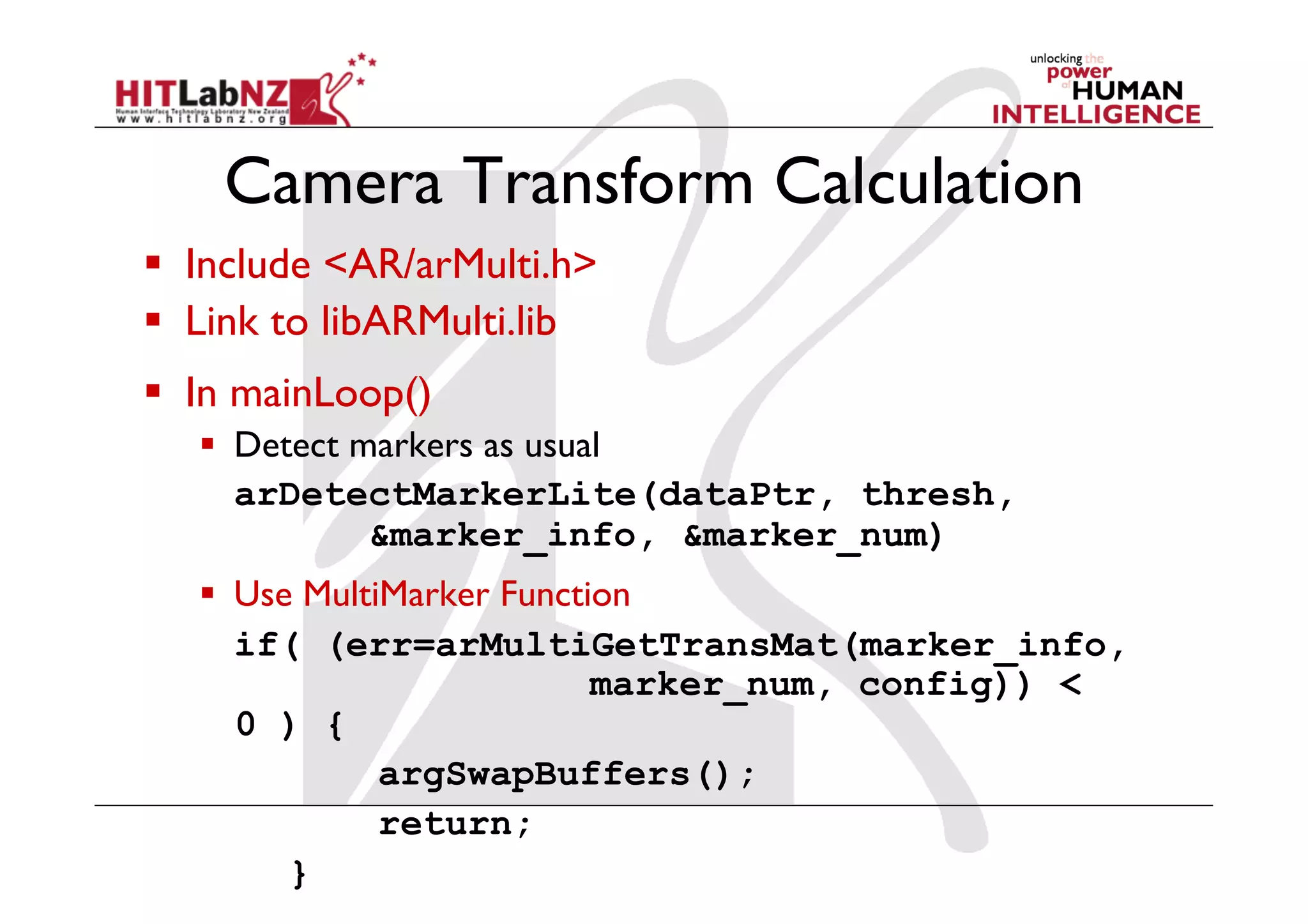
![Drawing Multiple Objects
Send the object list to the draw function
draw( object, objectnum );
Draw each object individually
for( i = 0; i < objectnum; i++ ) {
if( object[i].visible == 0 ) continue;
argConvGlpara(object[i].trans, gl_para);
draw_object( object[i].id, gl_para);
}](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-90-2048.jpg)
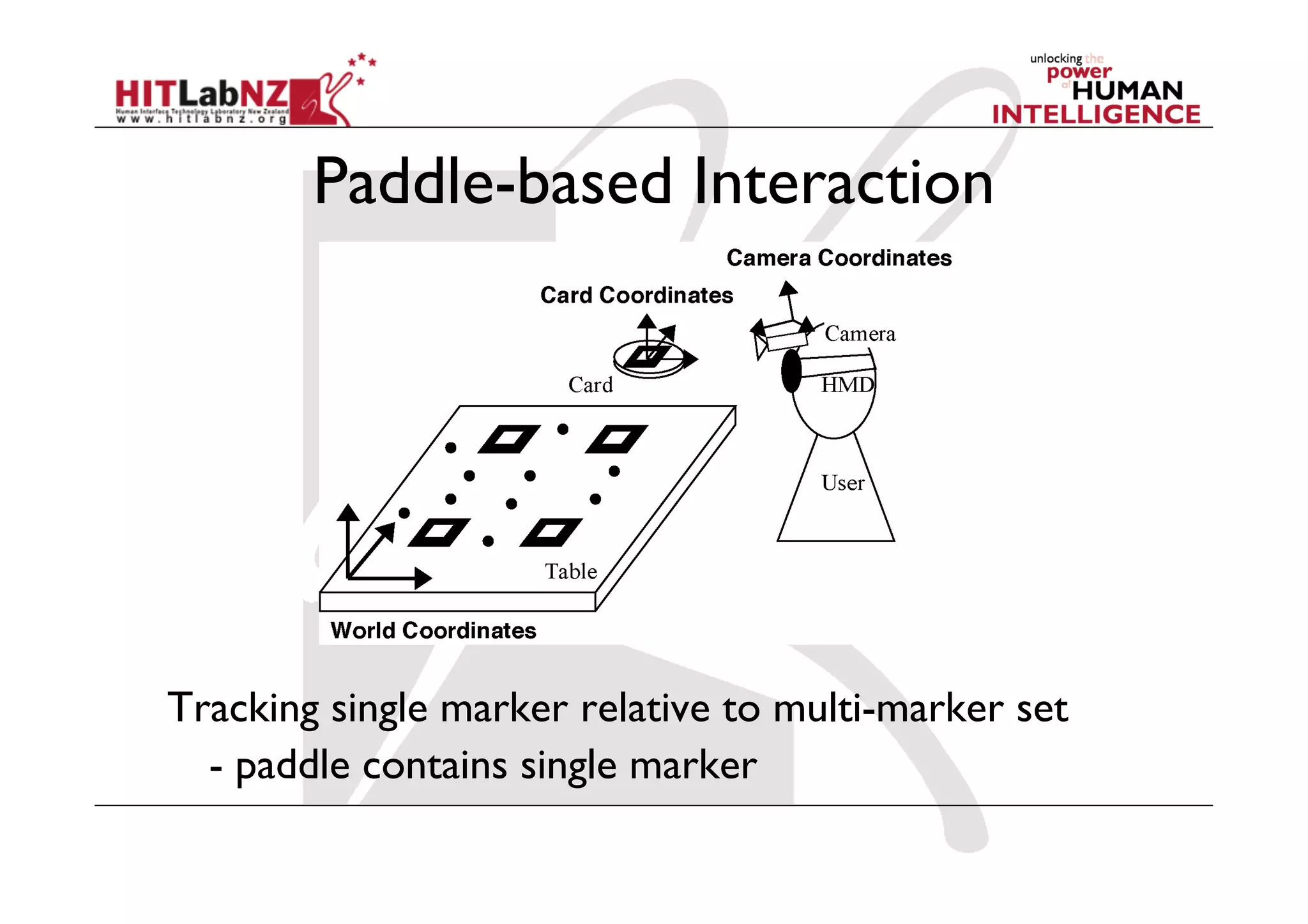
![Proximity Based Interaction
Sample File – CollideTest.c
Detect distance between markers
checkCollisions(object[0],object[1], DIST)
If distance < collide distance
Then change the model/perform interaction](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-91-2048.jpg)
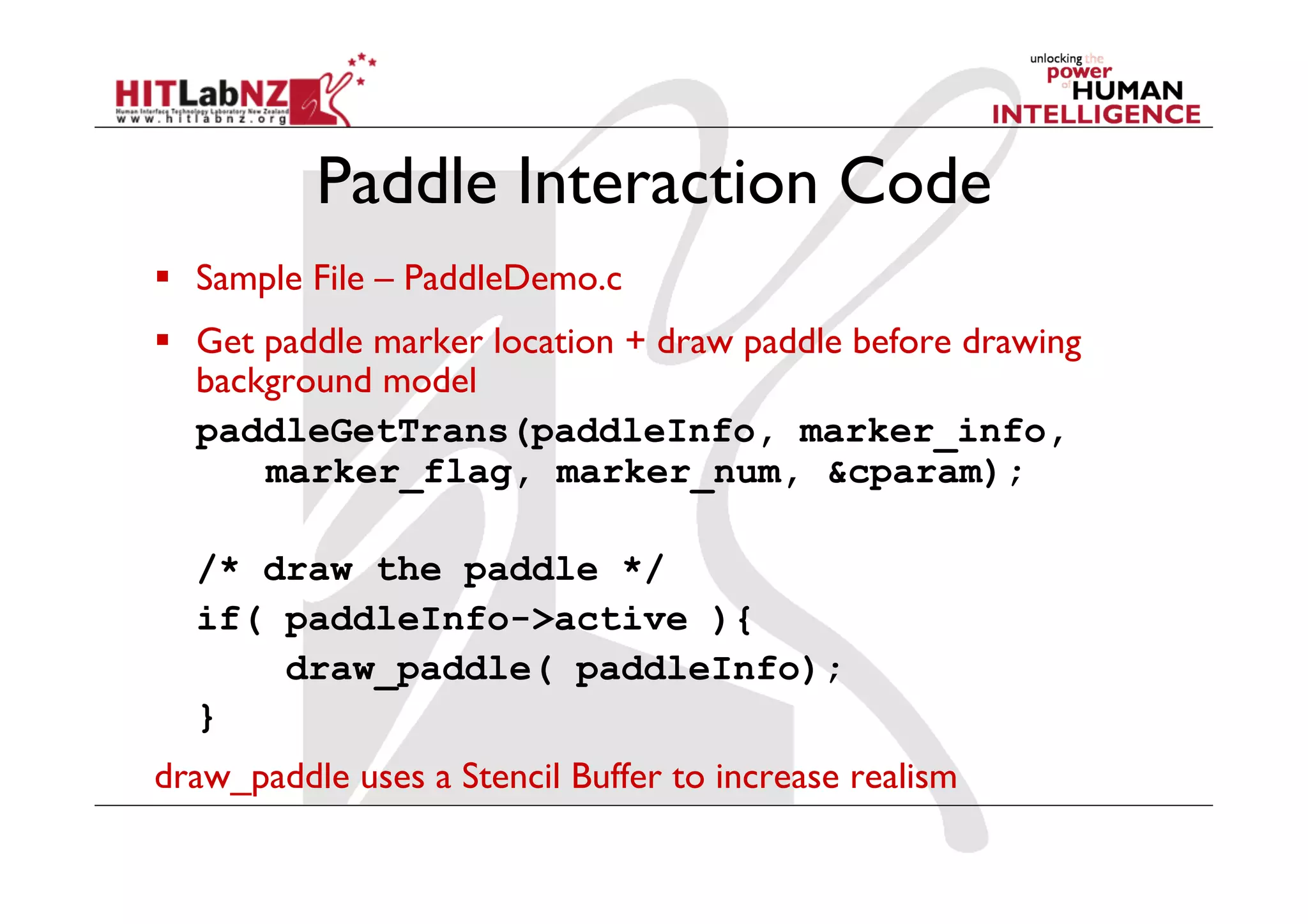
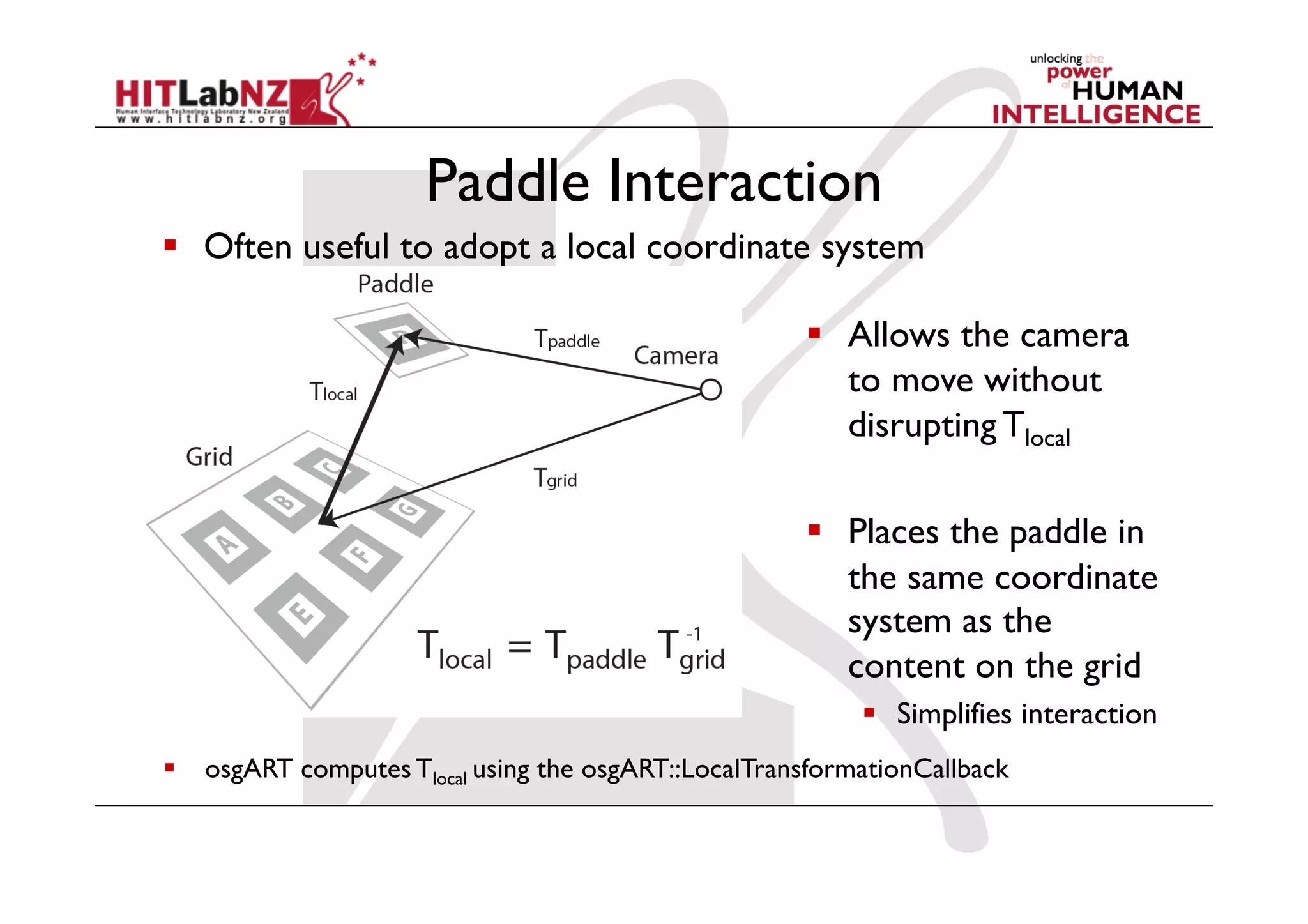
![Paddle Interaction Code II
Sample File – paddleDrawDemo.c
Finds the paddle position relative to global coordinate frame:
setBlobTrans(Num,paddle_trans[3][4],base_trans[3][4])
Sample File – paddleTouch.c
Finds the paddle position:
findPaddlePos(&curPadPos,paddleInfo->trans,config->trans);
Checks for collisions:
checkCollision(&curPaddlePos,myTarget[i].pos,20.0)](https://image.slidesharecdn.com/426lecture7full-120912014755-phpapp02/75/426-lecture-7-Designing-AR-Interfaces-97-2048.jpg)

This document discusses the design of augmented reality interfaces. It begins by describing different types of AR interfaces such as browsing interfaces, 3D interfaces, tangible interfaces, and tangible AR interfaces. It then discusses specific interface design considerations for AR like using physical objects as controls for virtual objects. The document provides examples of space-multiplexed and time-multiplexed tangible AR interfaces. It emphasizes designing AR interfaces using principles from tangible user interfaces. Overall, the document provides guidance on conceptualizing and building effective AR experiences through consideration of physical components, display elements, and interaction metaphors.
Introduction to COSC 426: Augmented Reality and Lecture 7 by Mark Billinghurst.
Overview of AR Interfaces: Browsing (simple), 3D (expressive), Tangible (embedded), and Tangible AR (interactive displays).
AR interfaces used as data browsers for 2D/3D virtual objects; focus on visualization and training applications.
3D AR Interfaces involve manipulating virtual objects in physical space through head and hand tracking.
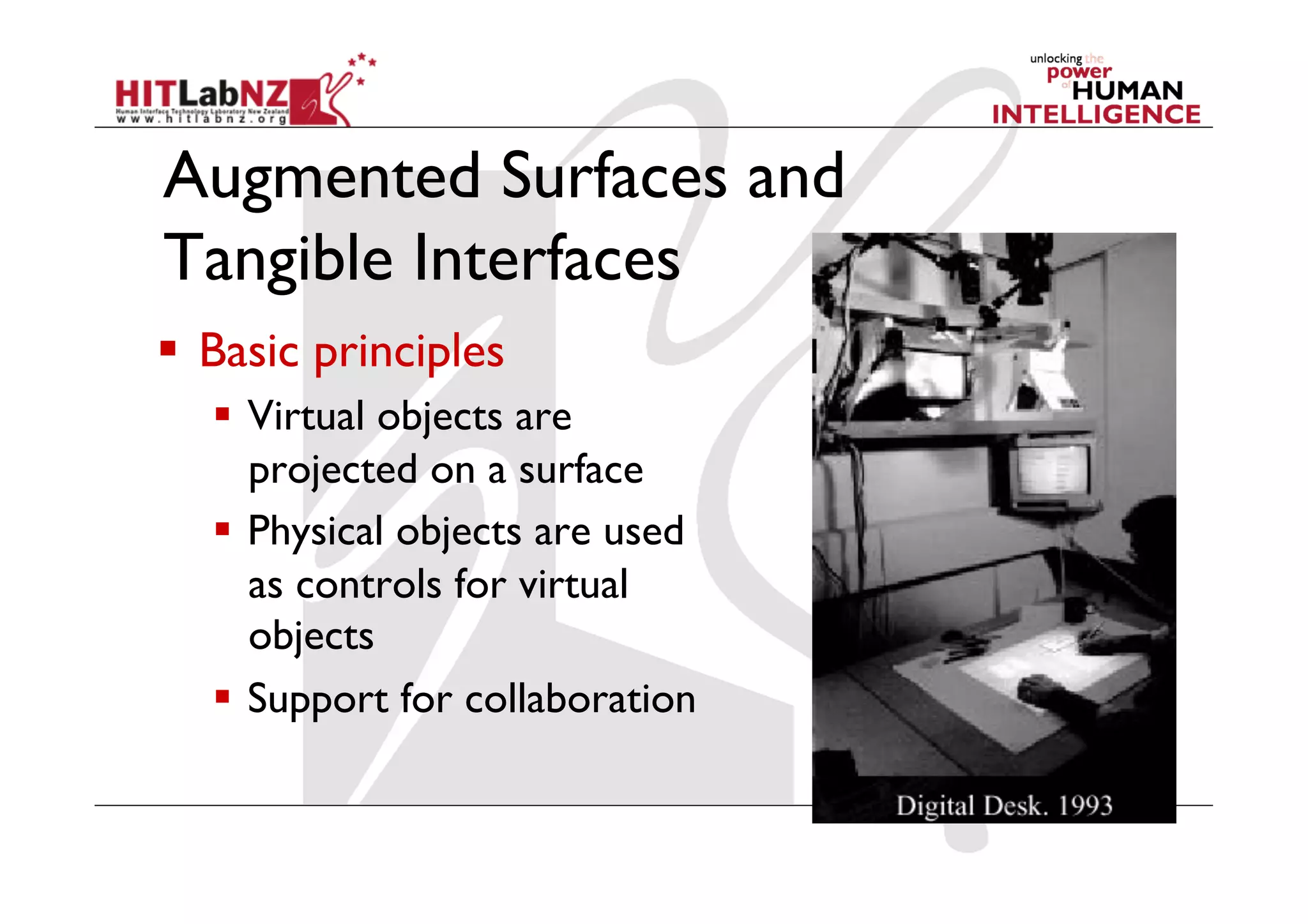
Augmented surfaces project virtual objects, using physical objects as controls, enabling collaboration.
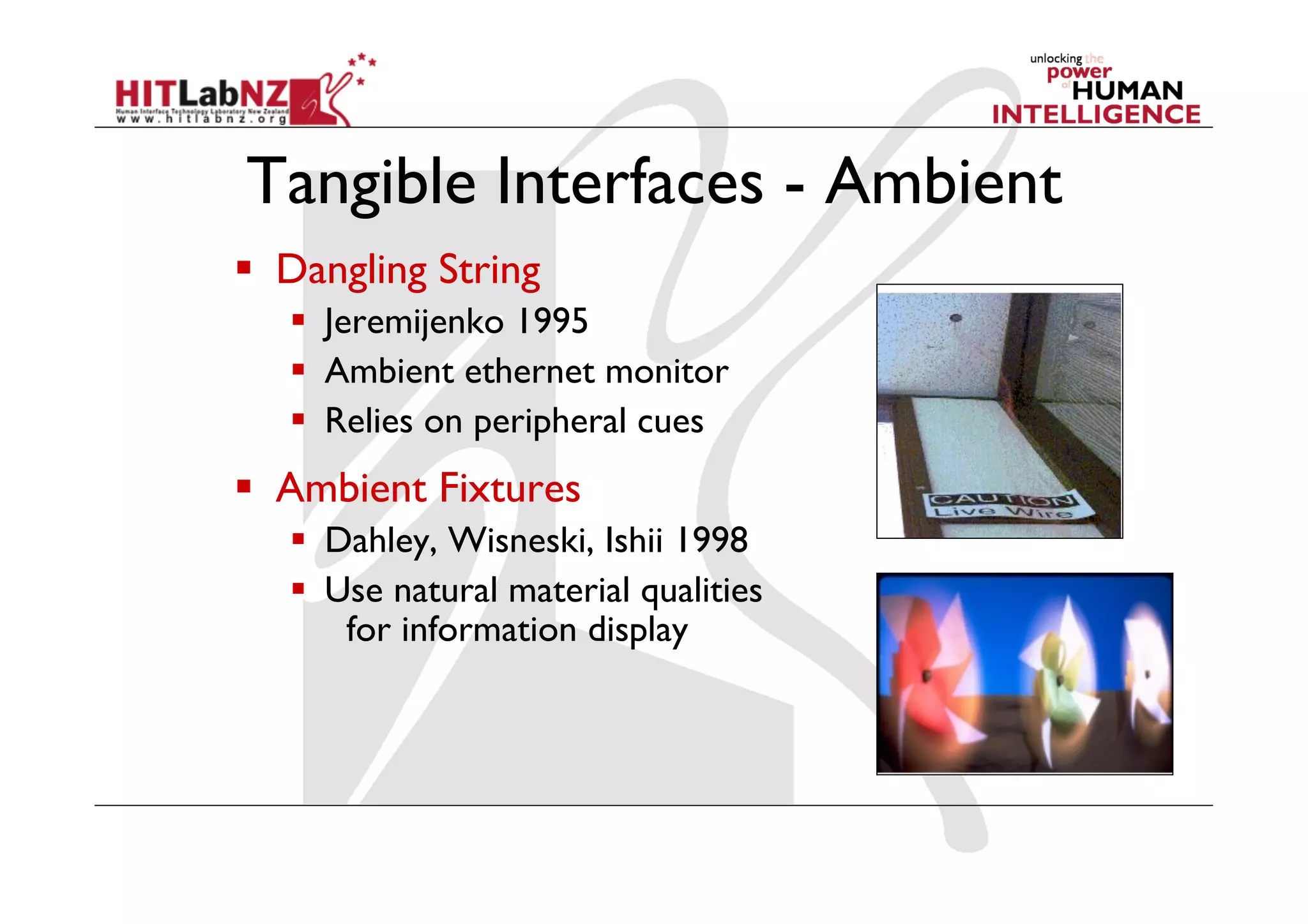
Ambient interfaces, like Dangling String and Ambient Fixtures, use natural cues for information display.
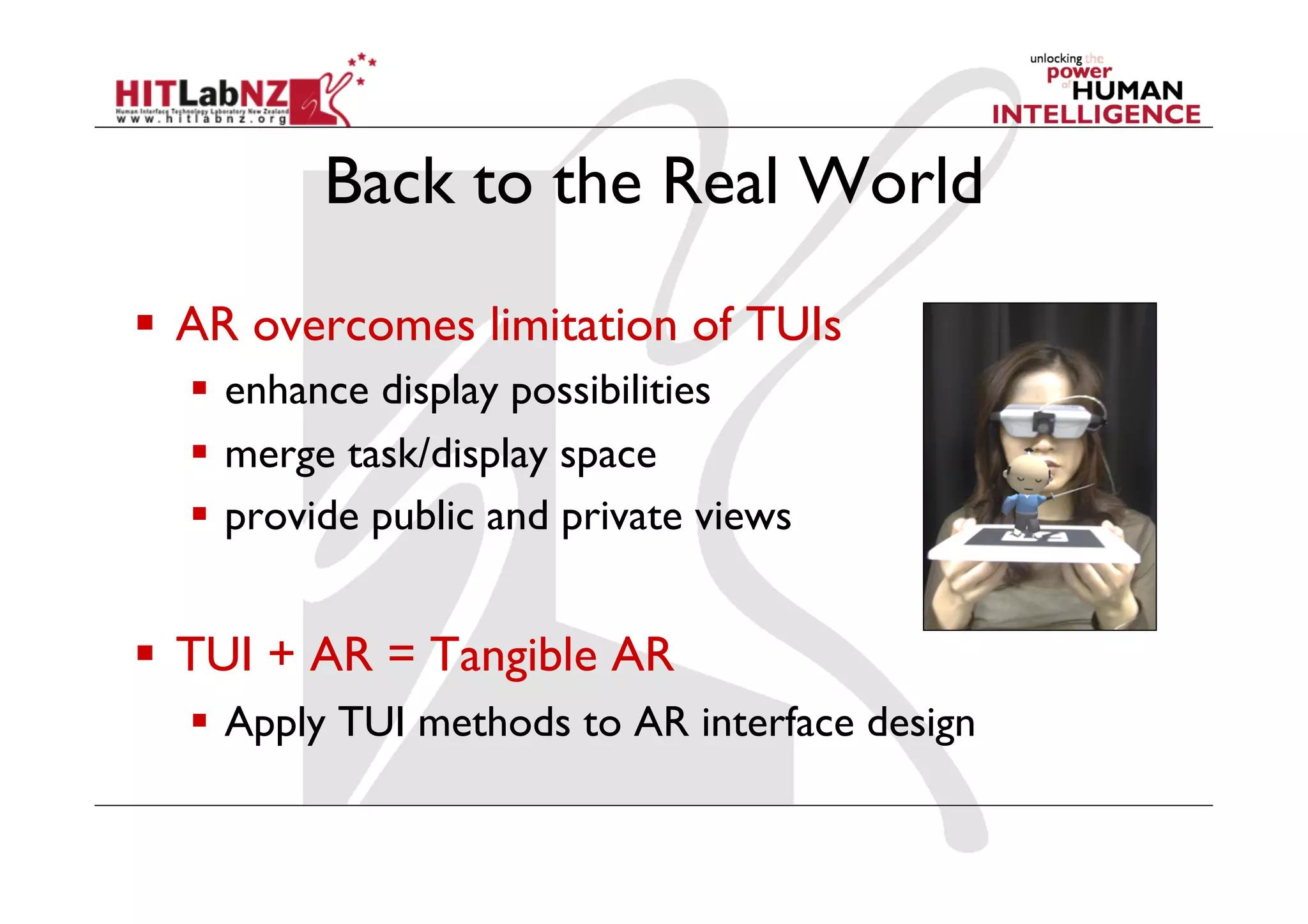
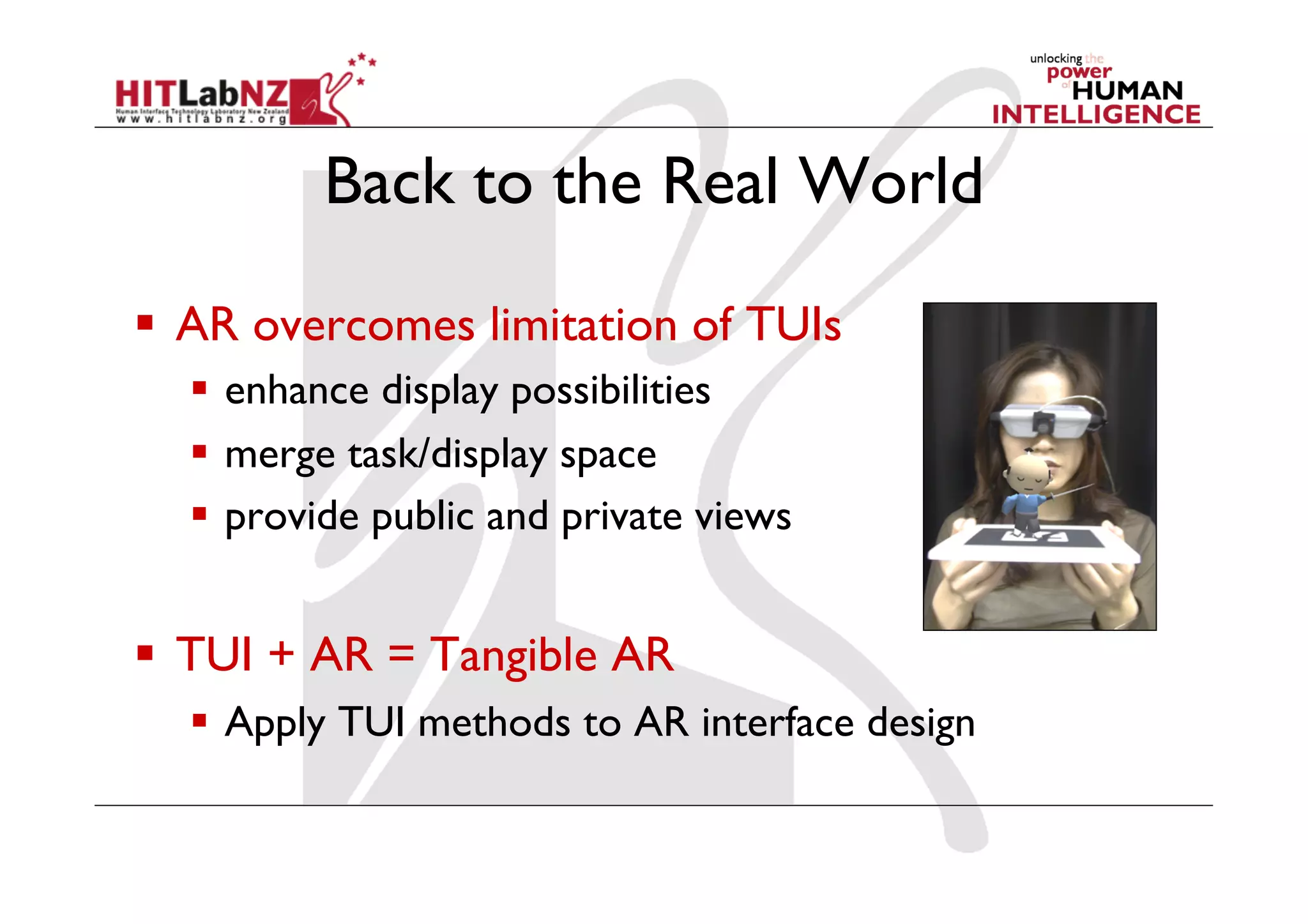
AR enhances Tangible User Interfaces (TUIs), merging task/display space for better interaction.
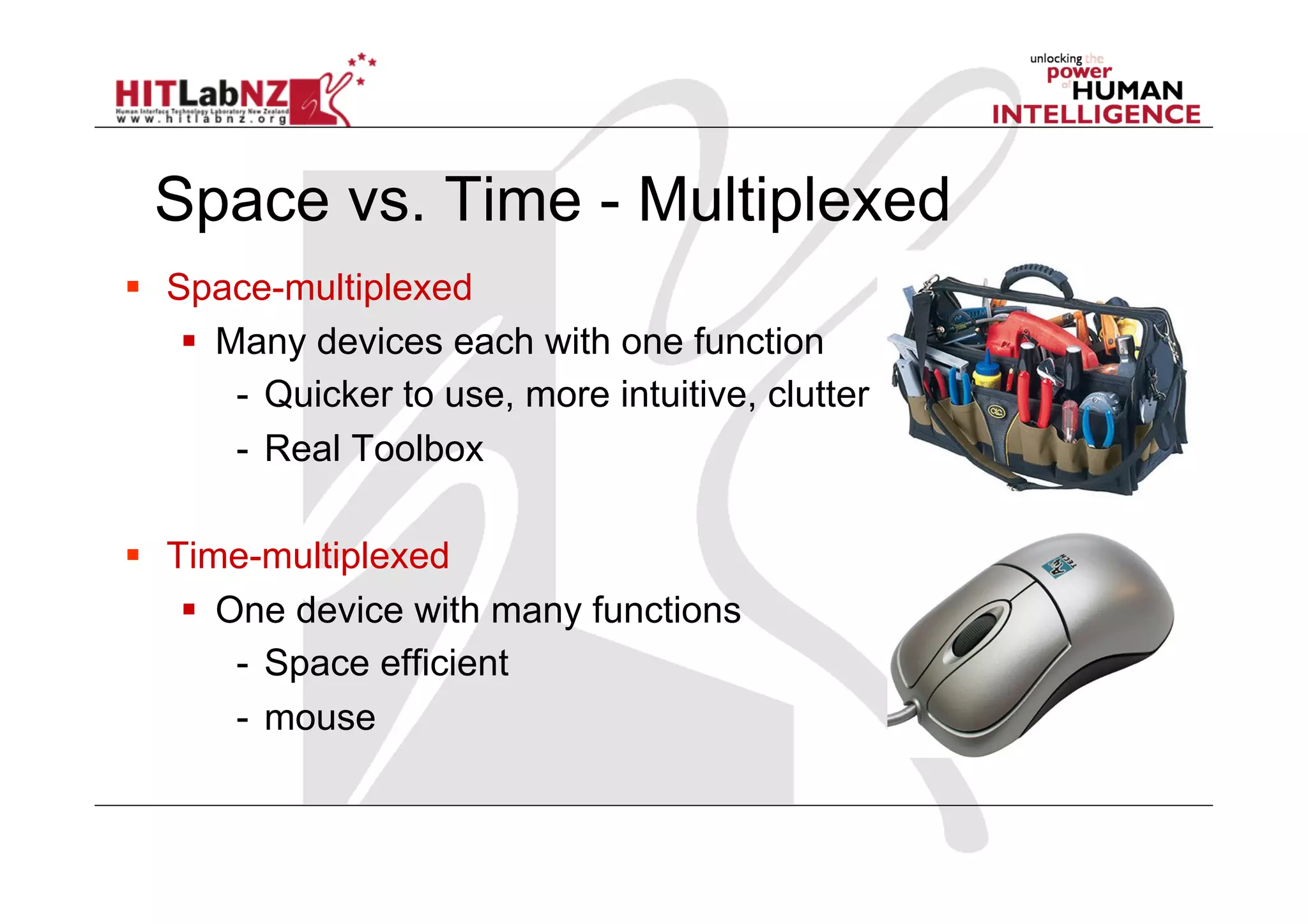
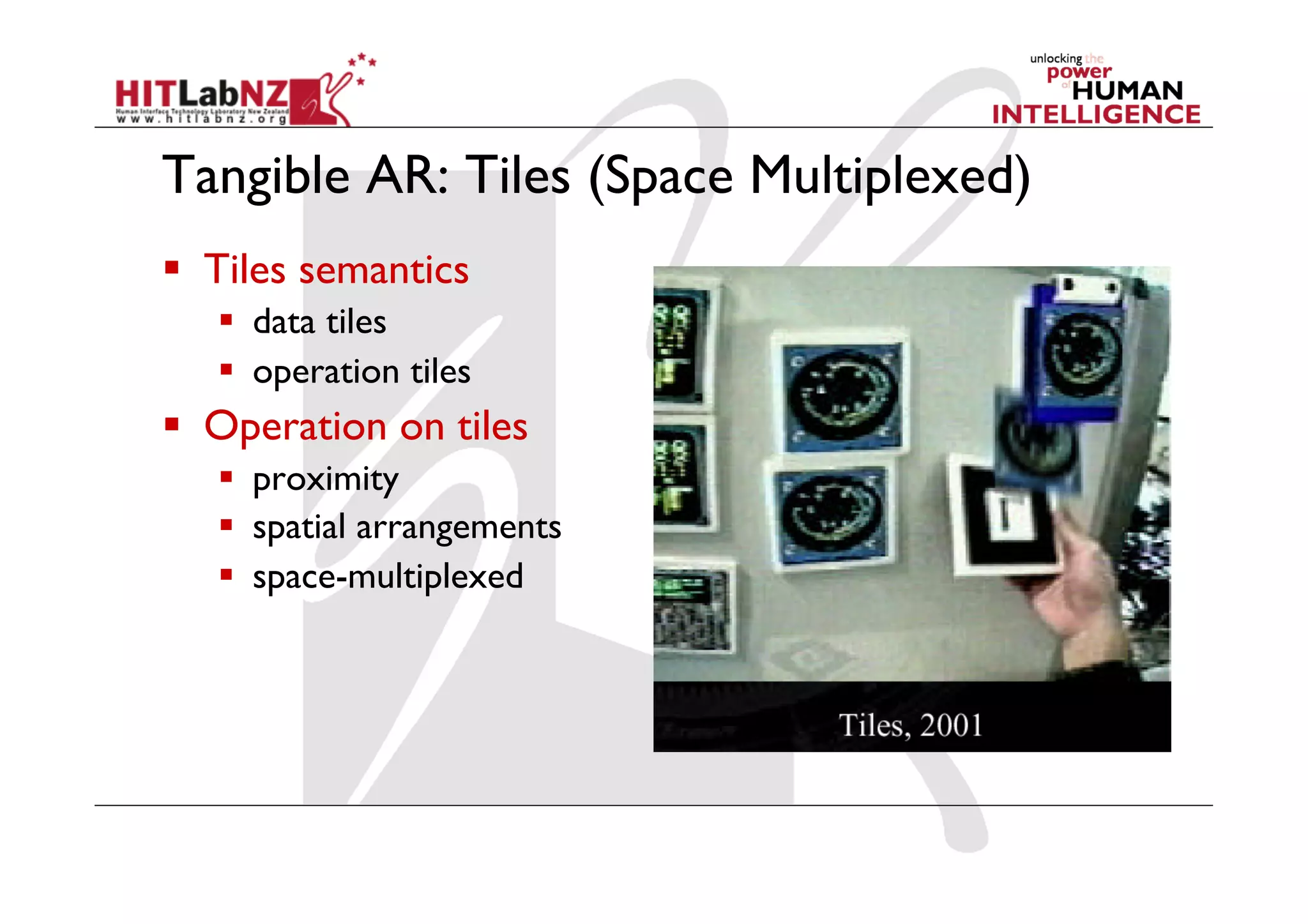
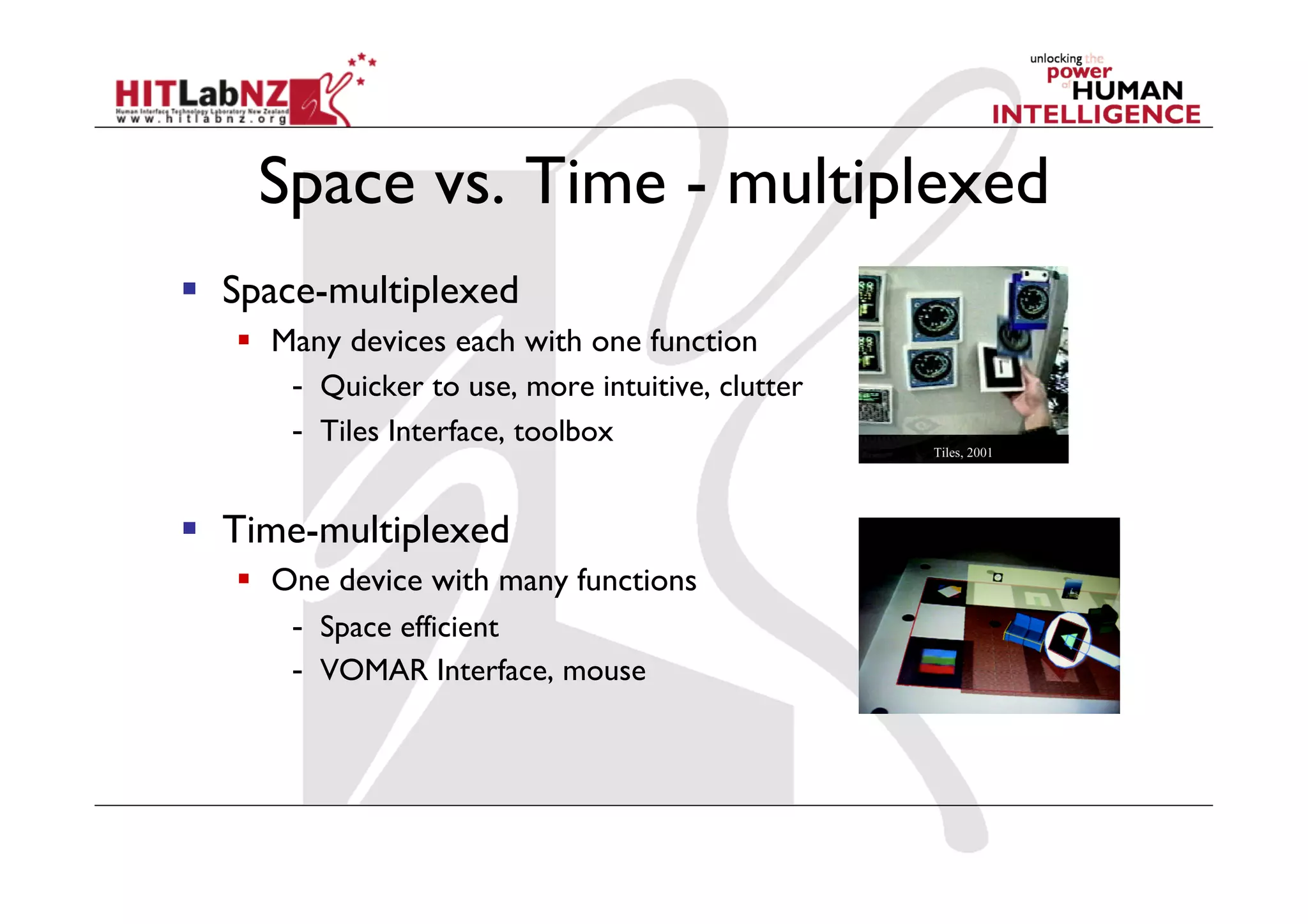
Discusses space-multiplexed (multiple devices) and time-multiplexed (single device, multiple functions) interfaces.
Tangible AR: Tiles (data + operation) allowing proximity interactions through spatial arrangements.
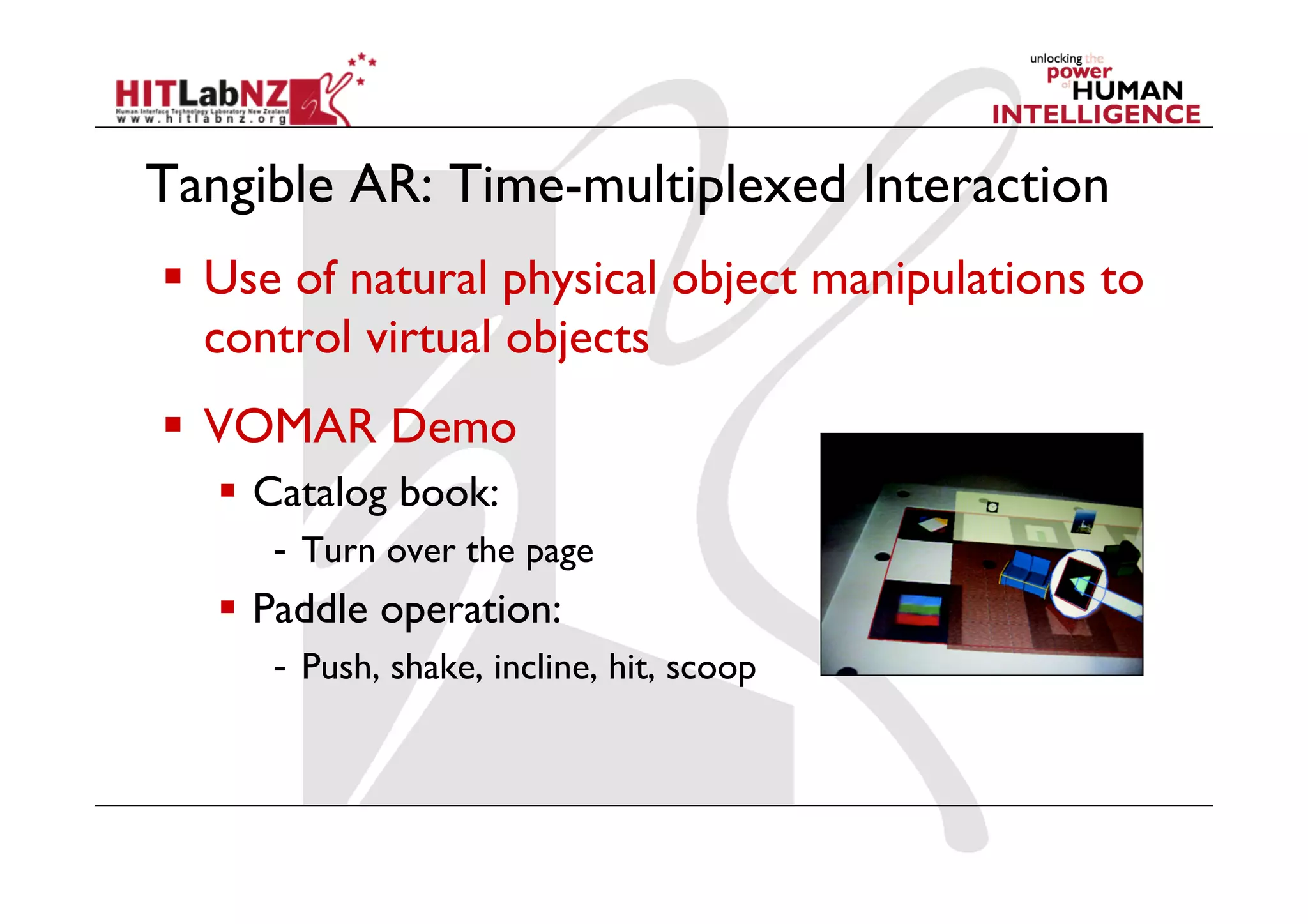
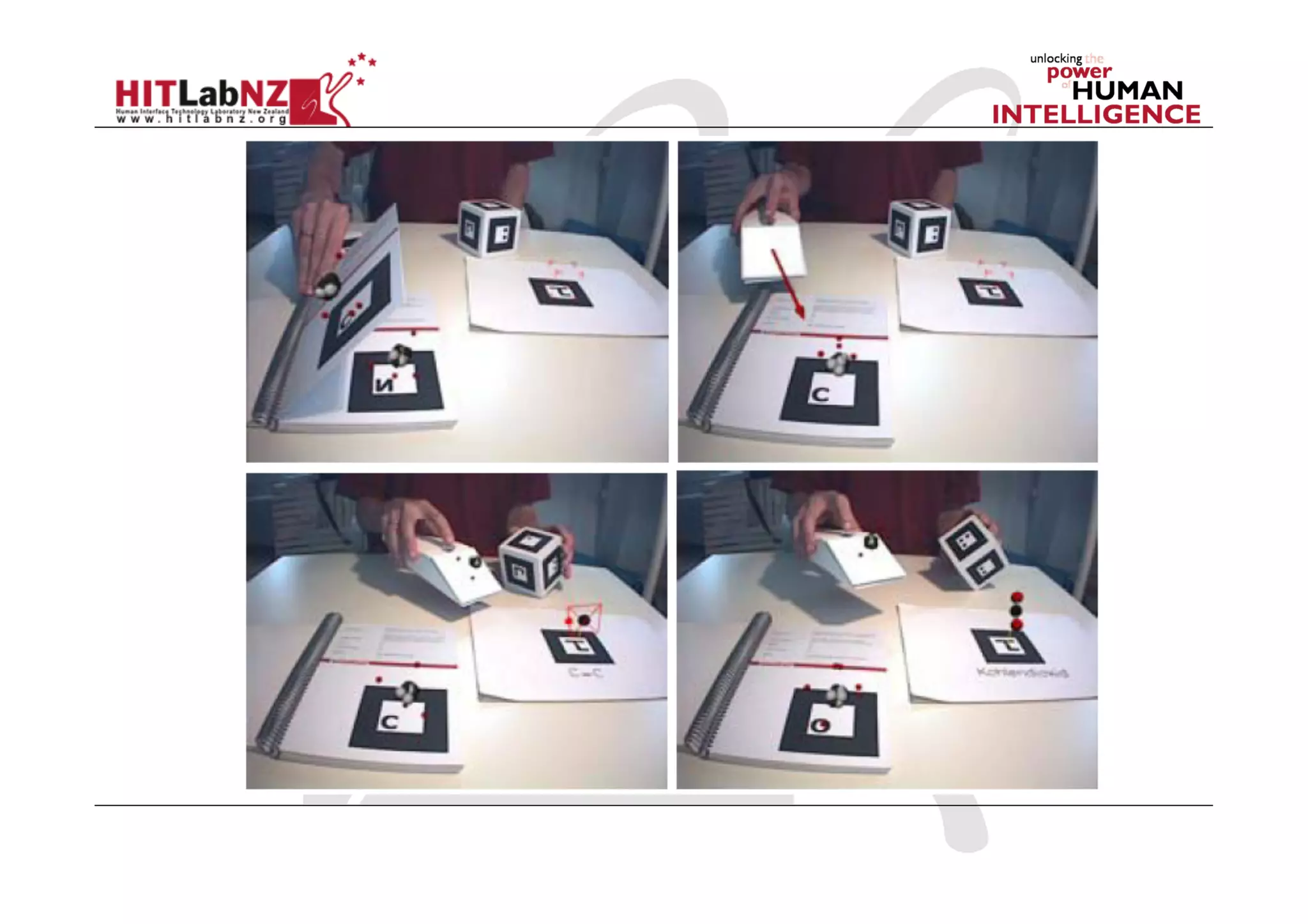
Natural physical manipulations control virtual objects, using a catalog book and paddle operations.
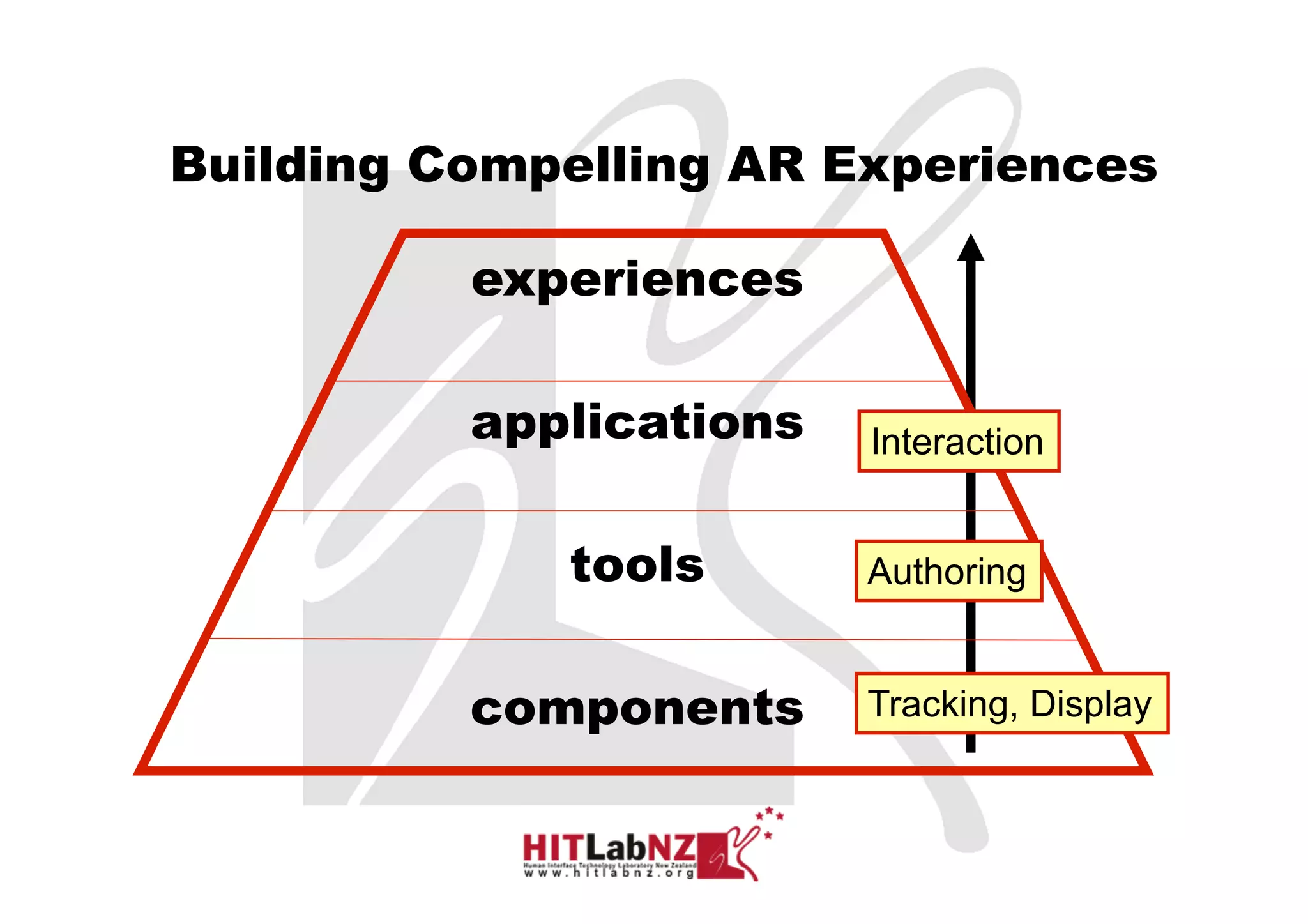
Components needed for compelling AR experiences: applications, interaction, tools, and tracking.
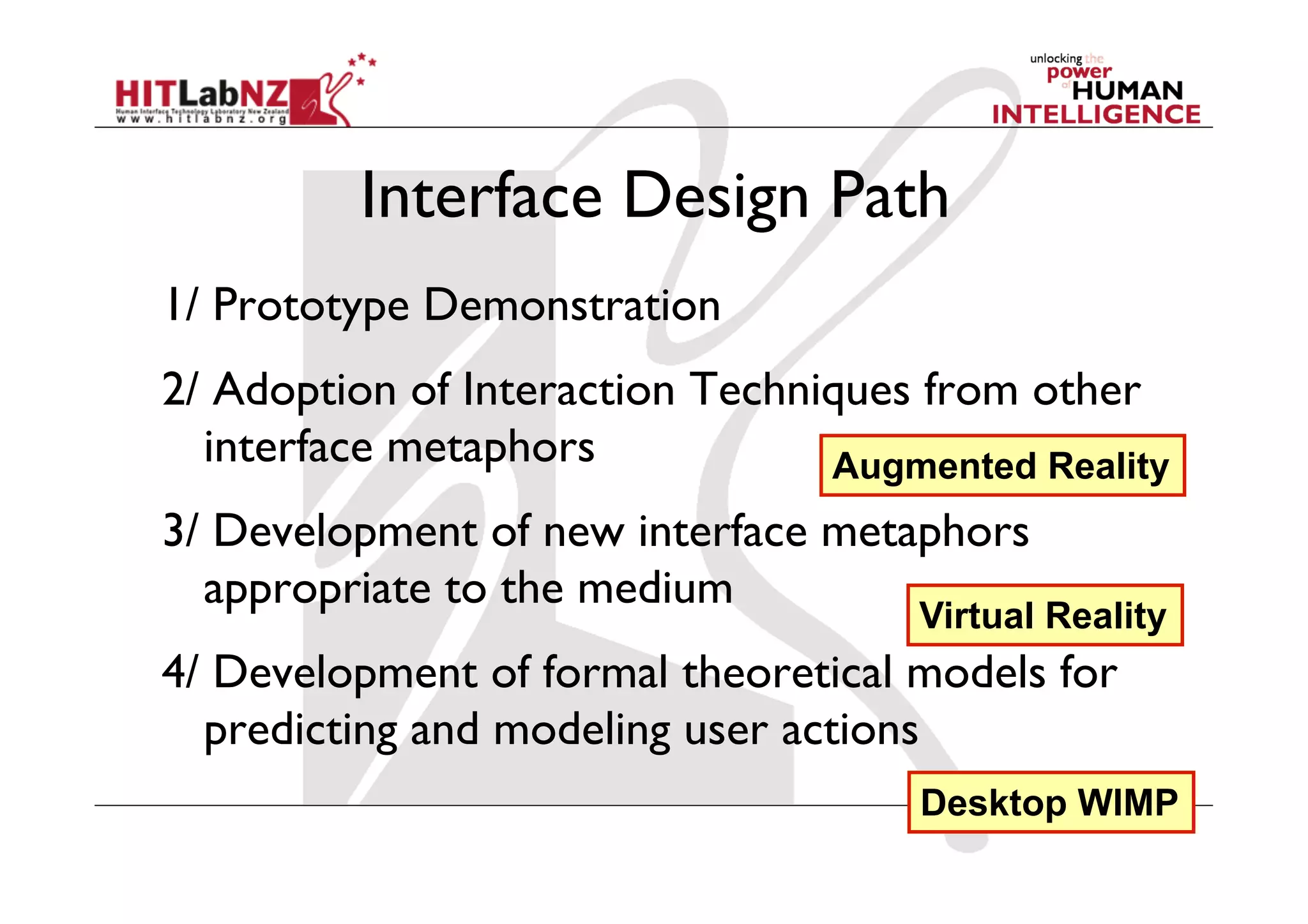
Path for interface design: prototype demos, adopting techniques, creating new metaphors, and formal models development.
Interface metaphors leverage user familiarity to ease understanding of unfamiliar technology.
Spreadsheet interface analogy to ledger sheets enhances interactive and computational capabilities.
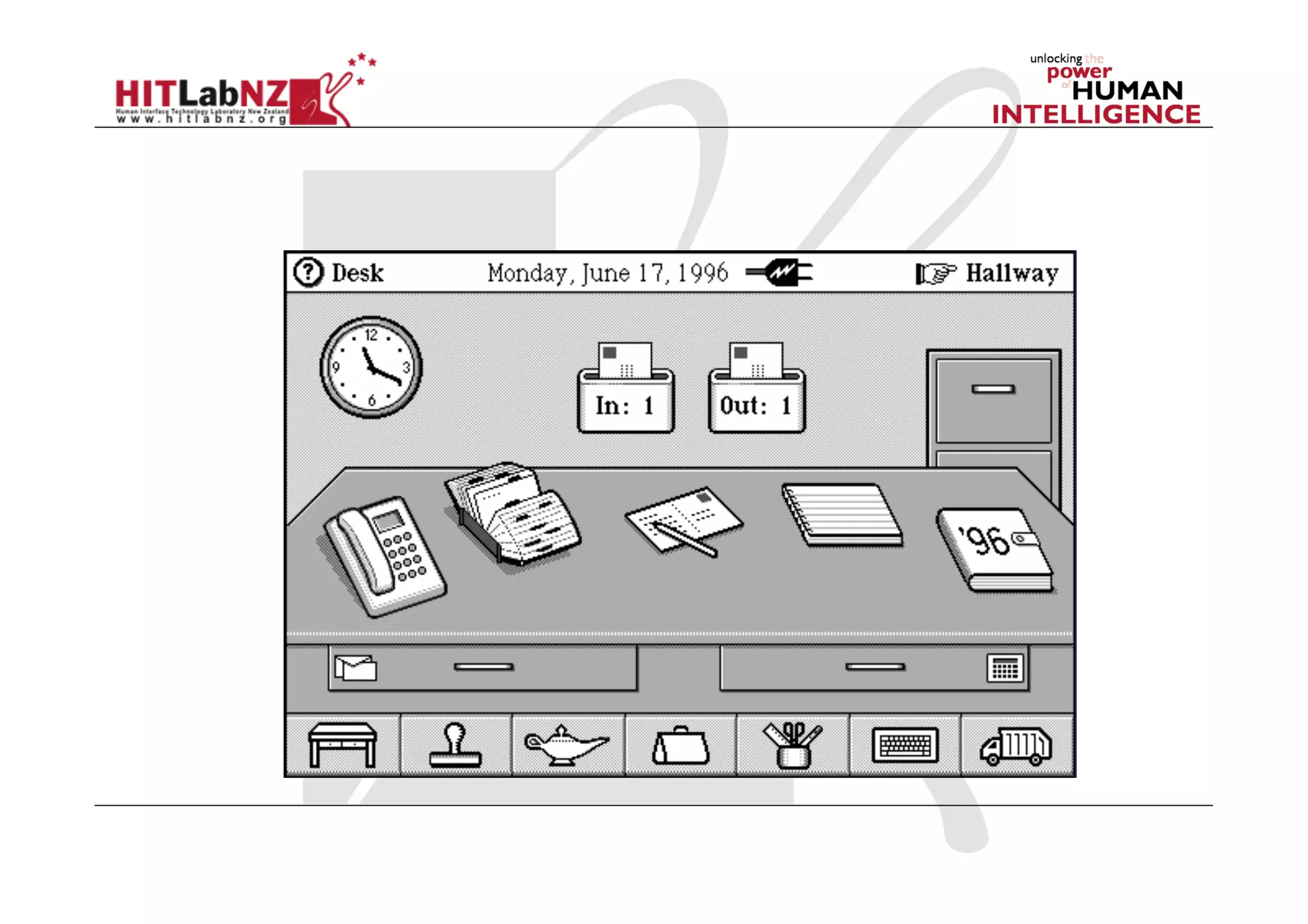
Highlighting simplicity and clarity in applications, aiding user engagement and task management.
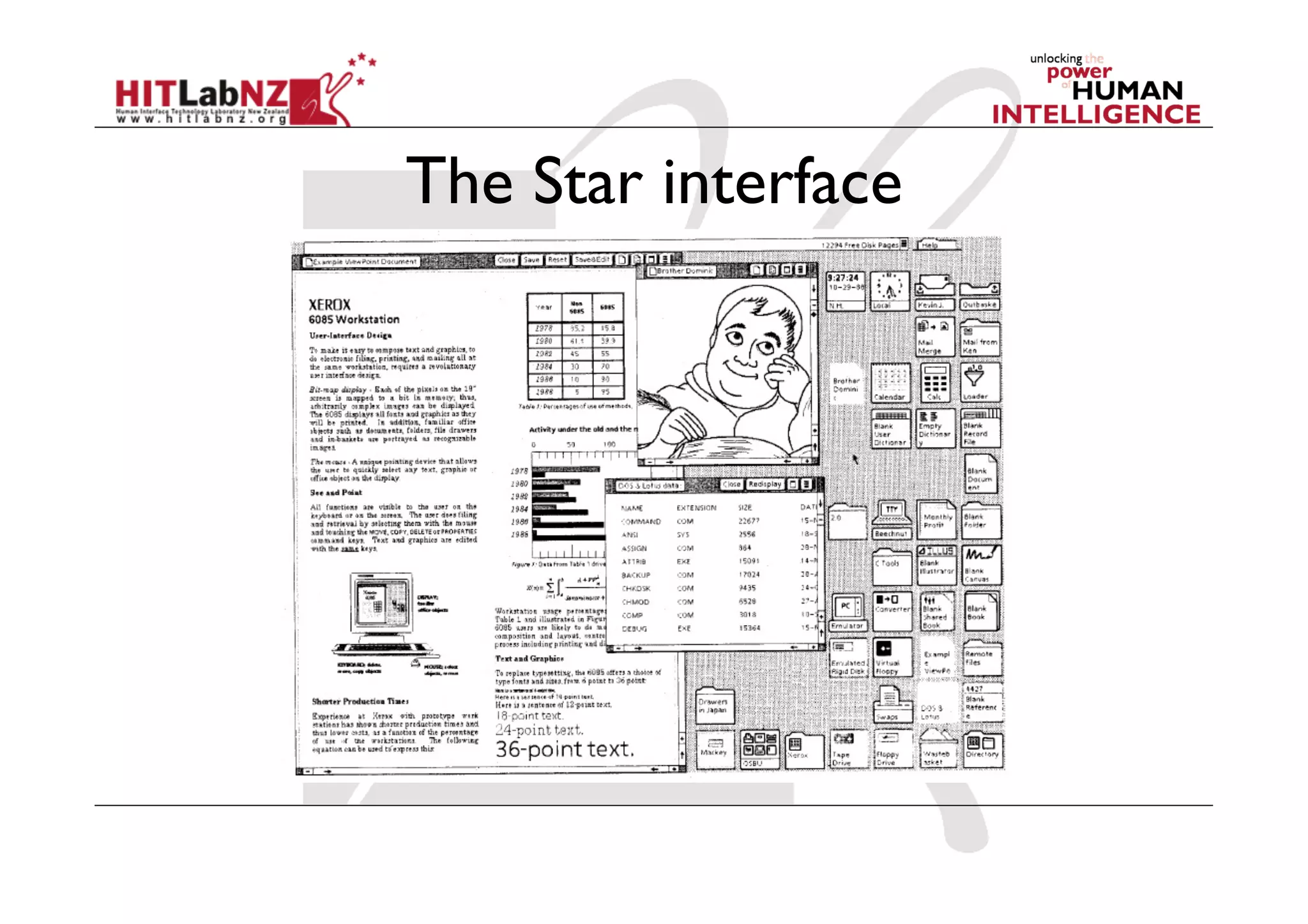
Examining the Star office system made computing accessible and familiar to users.
Interface metaphors simplify learning and accessing underlying conceptual models, increasing accessibility.
Issues relating to interface metaphors: cultural rule-breaking, constraint on design thinking, and potential misapplications.
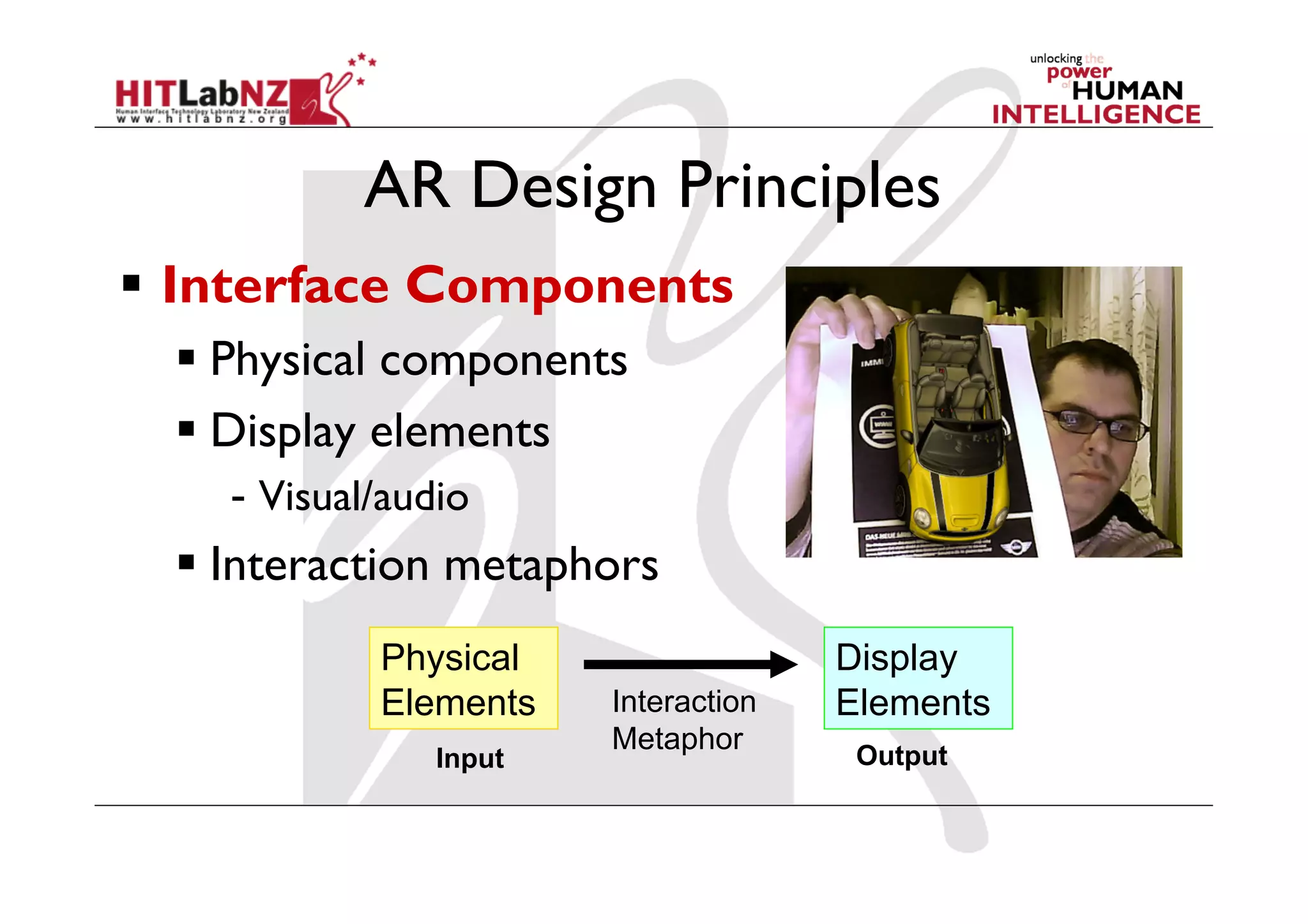
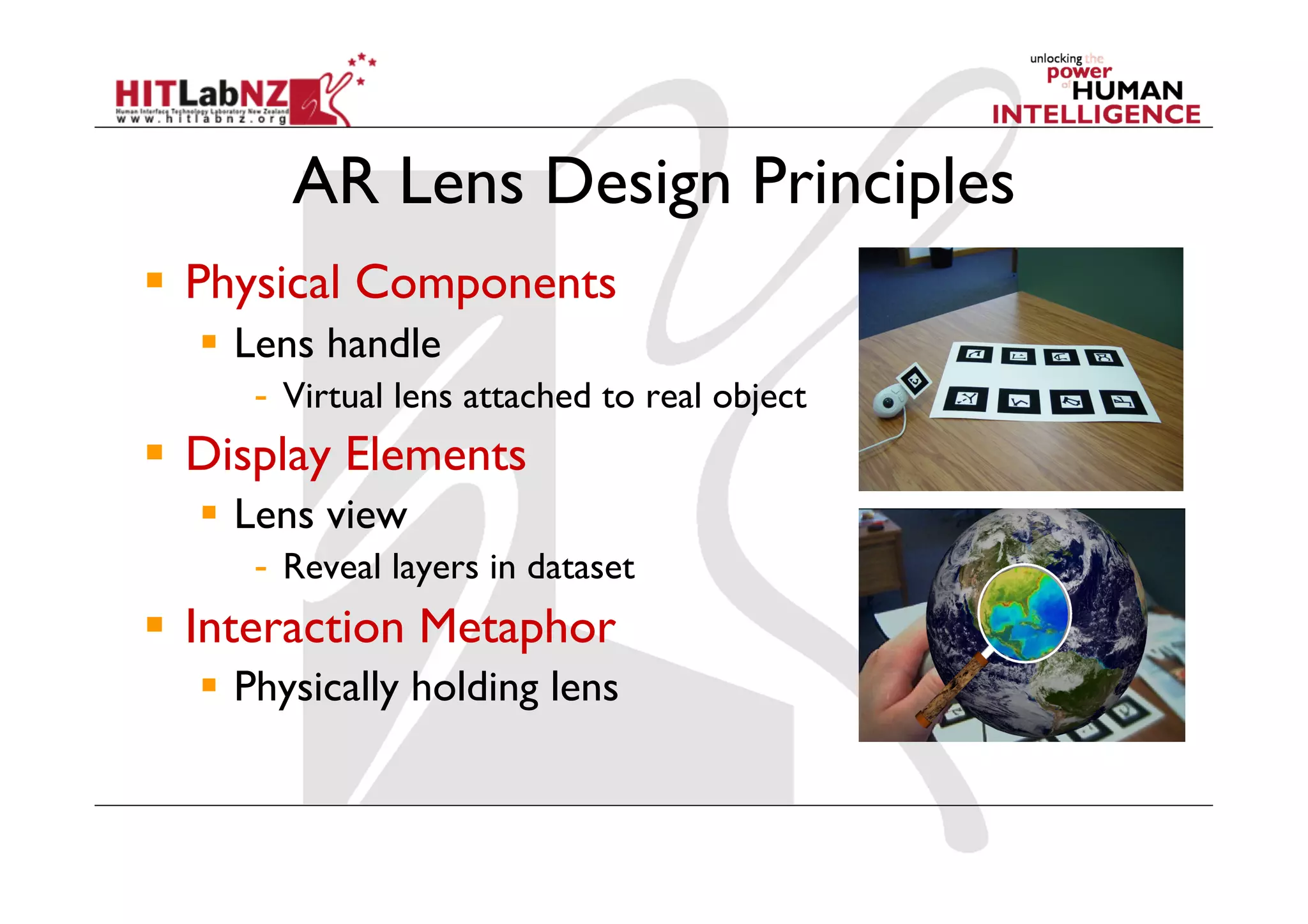
Design principles in AR focus on interface components, including physical and display elements.
Restating AR's ability to enhance TUIs by combining physical and virtual elements for better interaction.
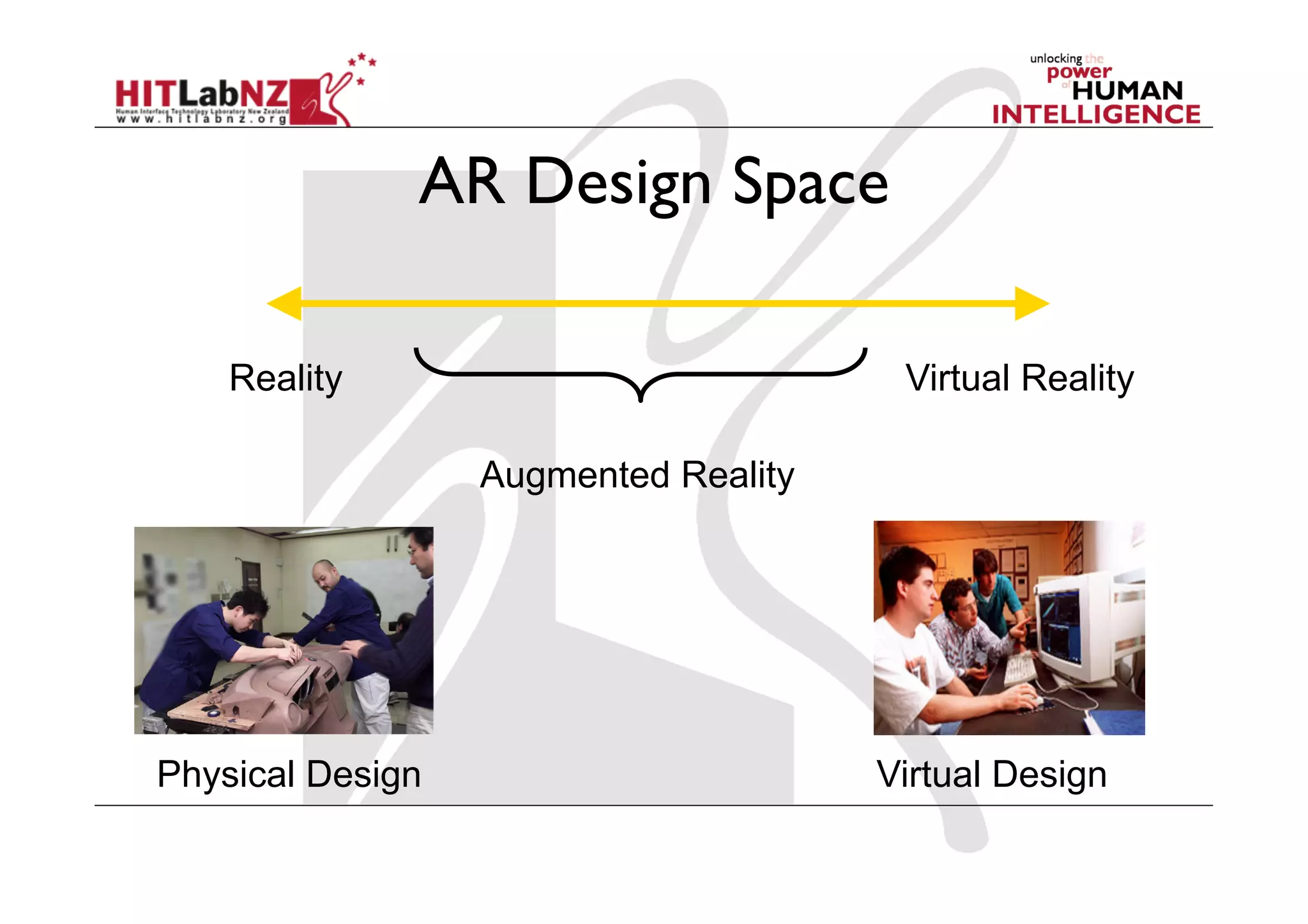
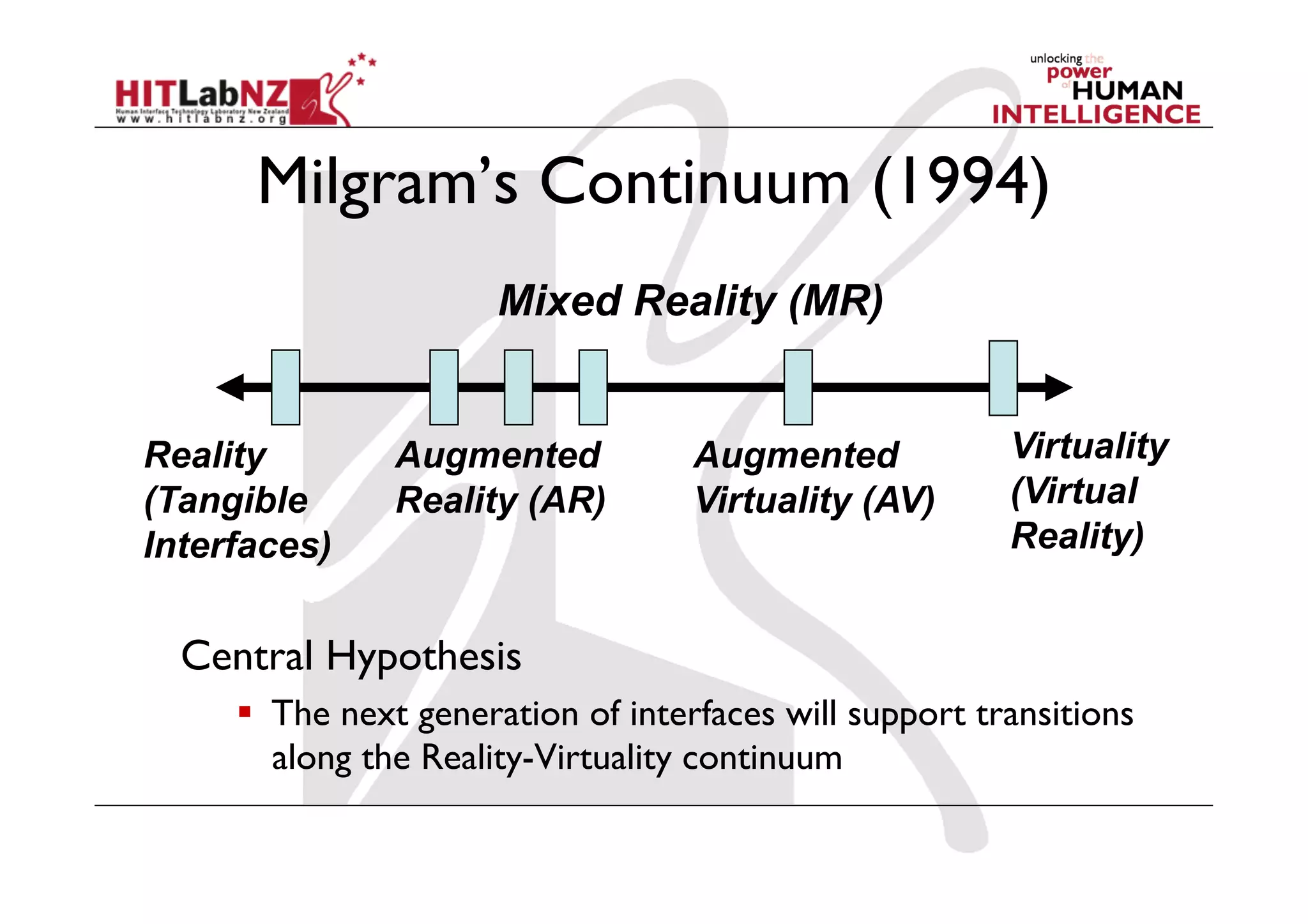
Analyzing the design space of AR, encompassing reality, virtual reality, and the balance between the two.
Principles specific to Tangible AR: spatial interaction, time/multiplexing, and collaborative user experience.
Designing objects with clear affordances, feedback, constraints, and natural mappings for effective use.
Affordances describe how objects invite specific interactions, a critical concept in interface design.
Explaining how virtual interfaces possess perceived rather than actual affordances, contrasting with physical objects.
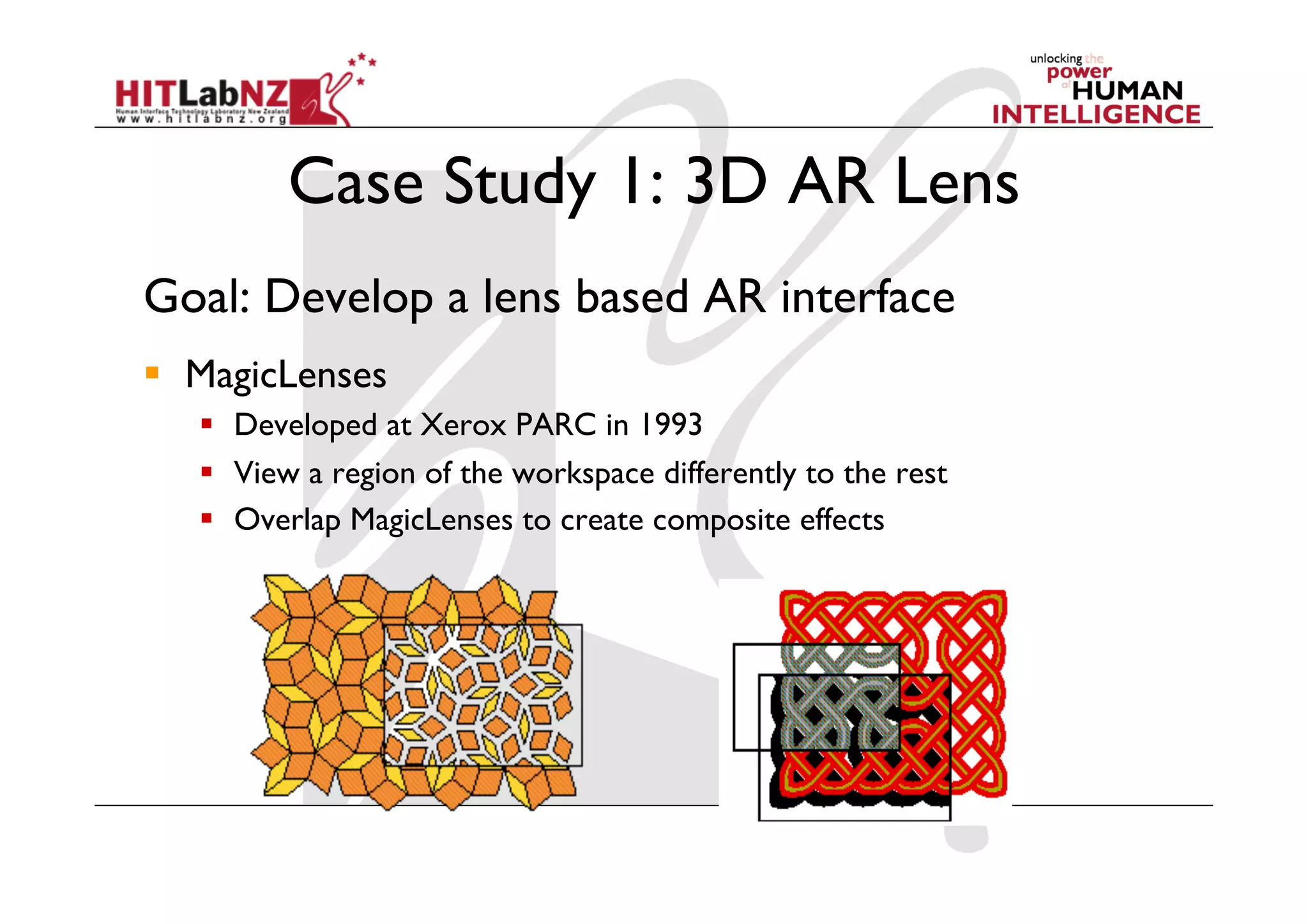
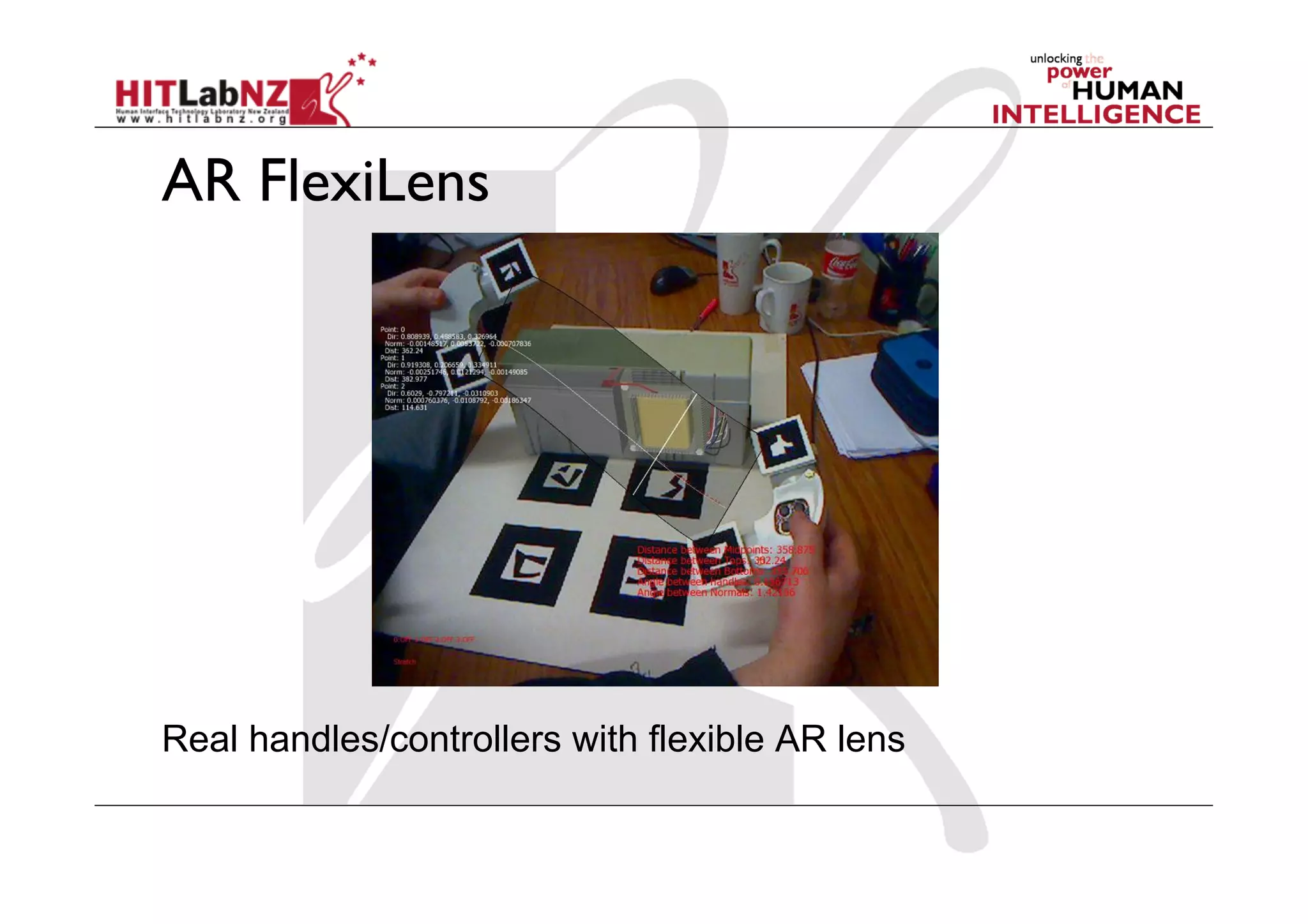
Magic Lenses exemplify lens-based AR interfaces developed for dynamic interaction with workspaces.
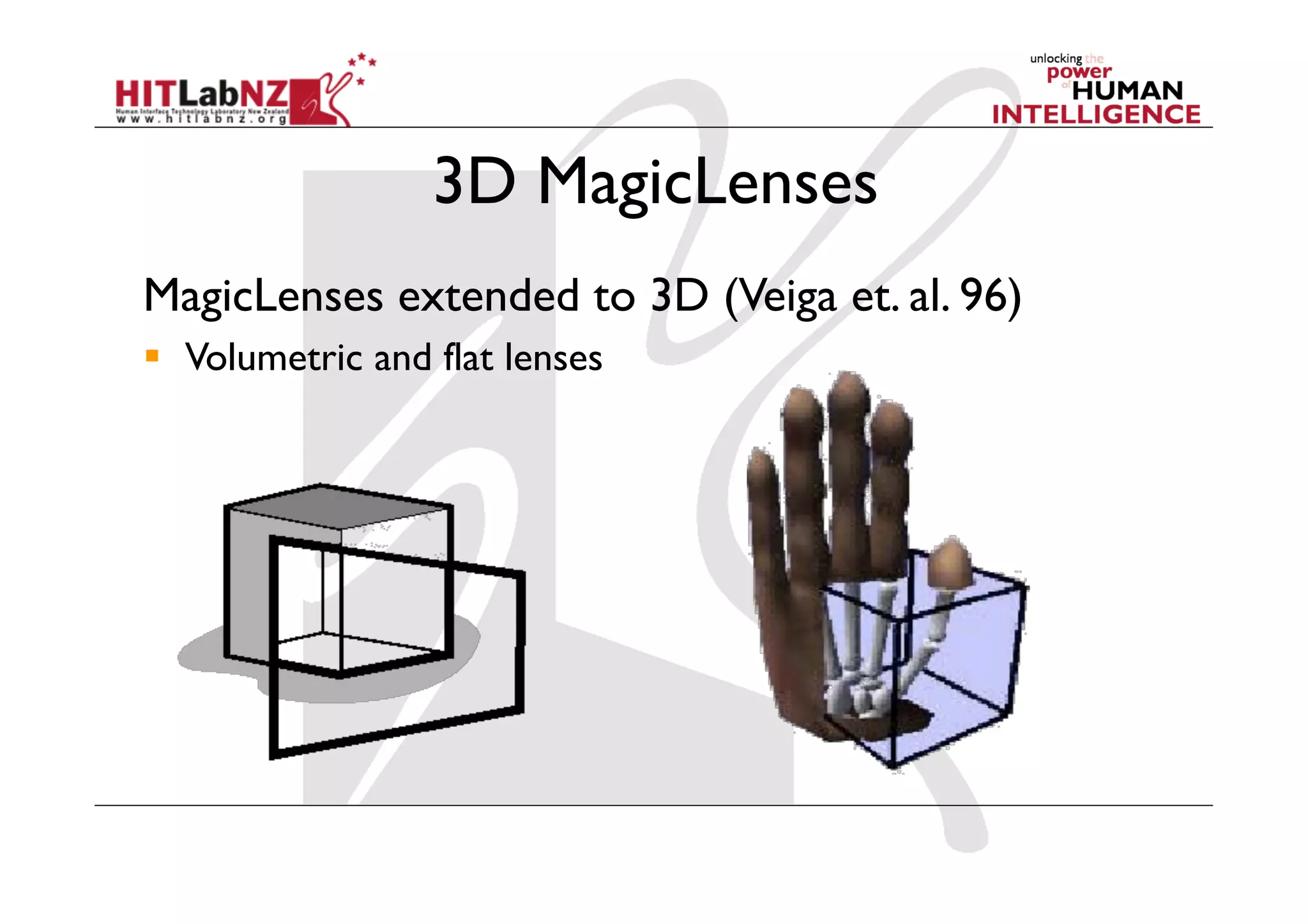
Extending MagicLenses to 3D, allowing complex visualizations in augmented environments.
Principles for AR lens interfaces, emphasizing physical components and virtual interactions for enhanced user experience.
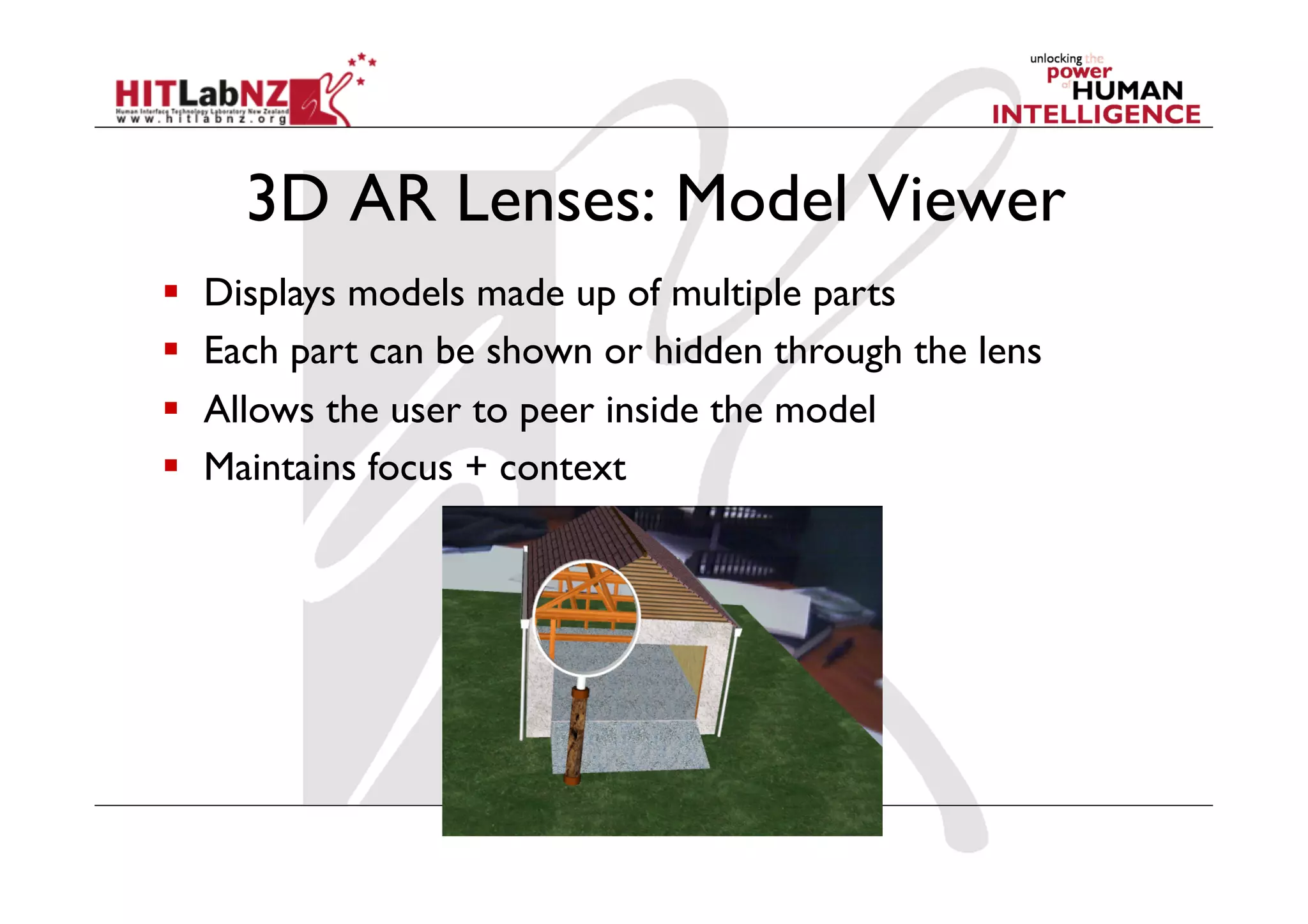
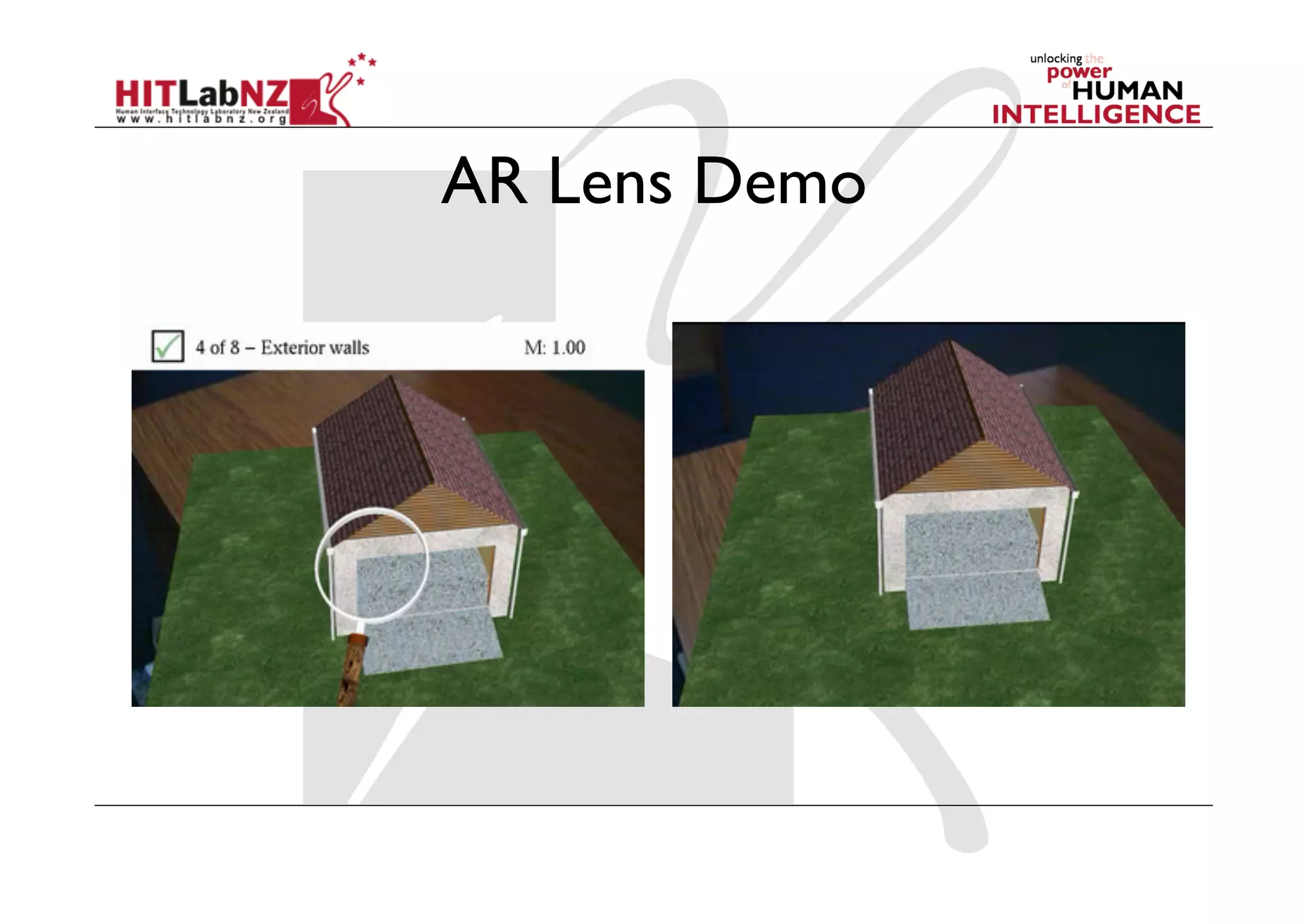
Demo showing model interactions through AR lenses, facilitating visibility of multiple model parts.
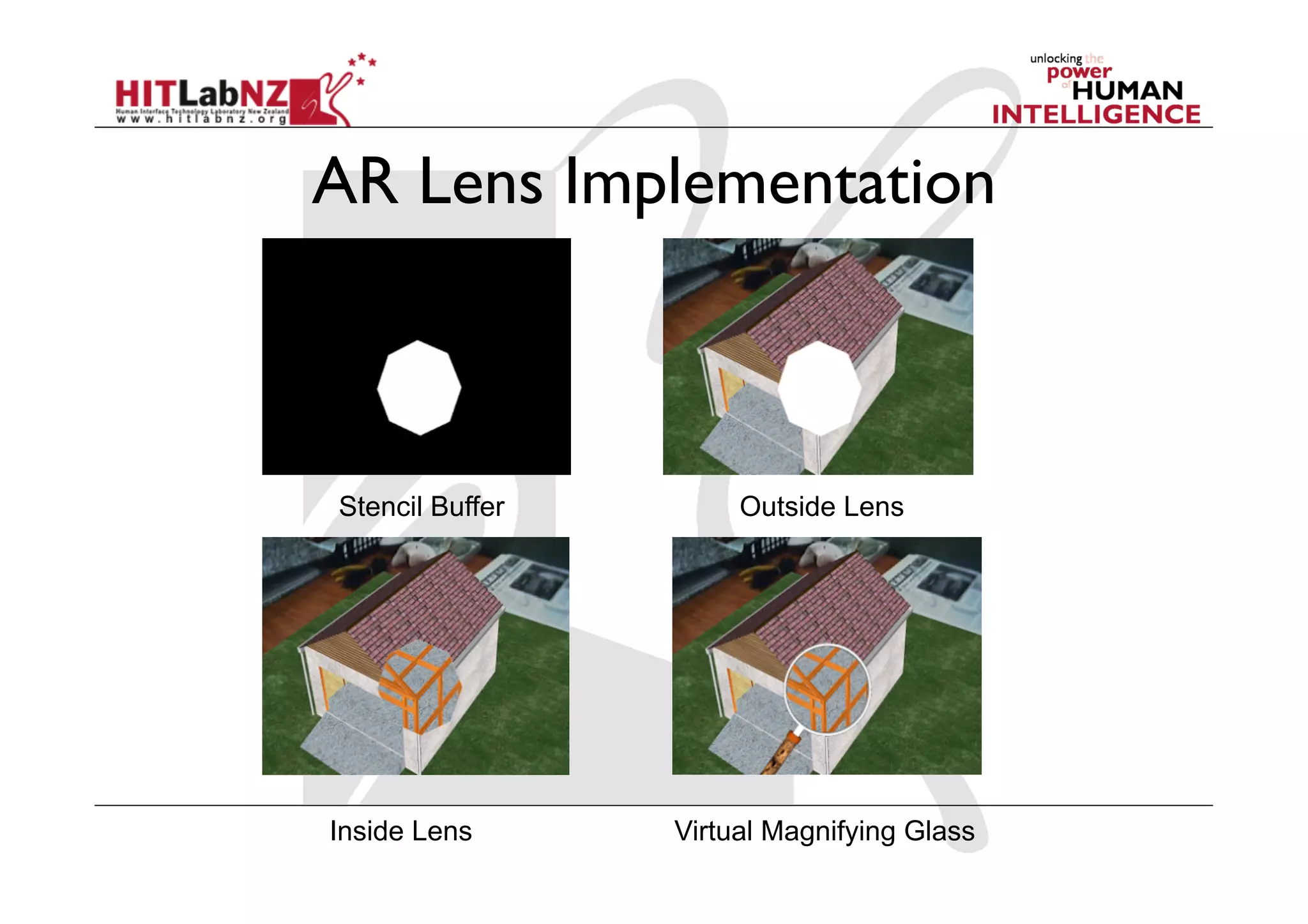
Using lens concepts to filter information, view representations, and facilitate transitions in AR/VR environments.
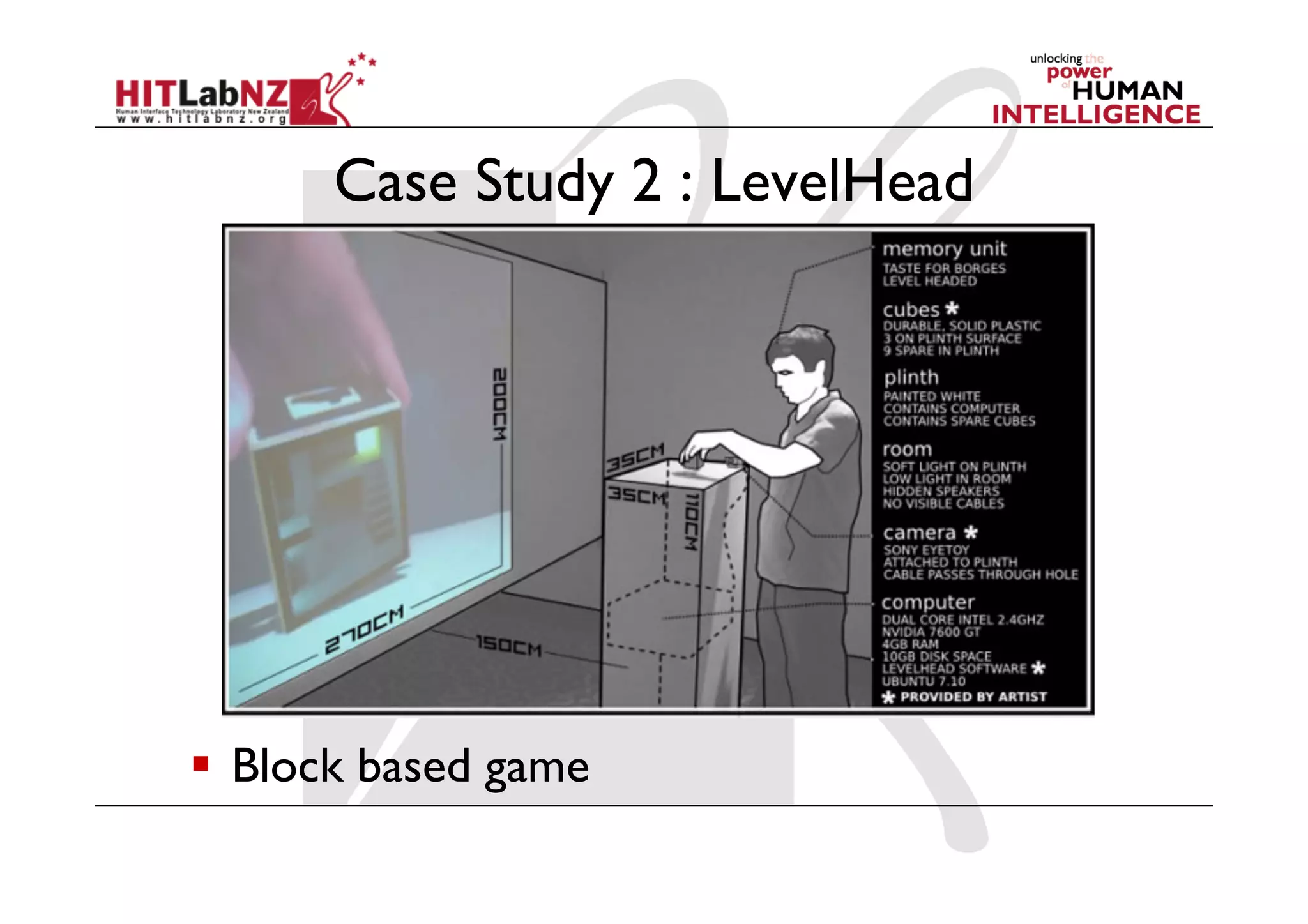
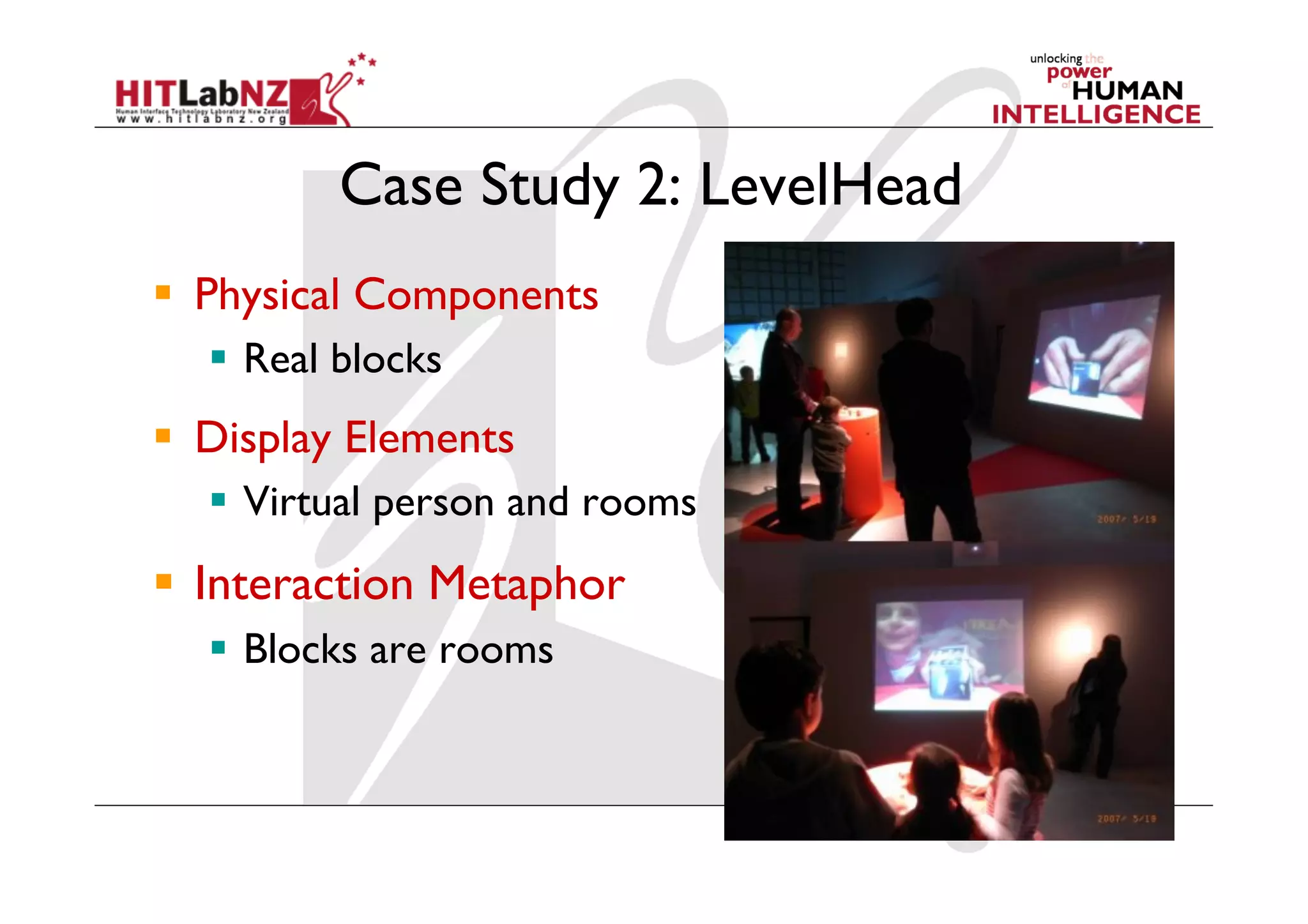
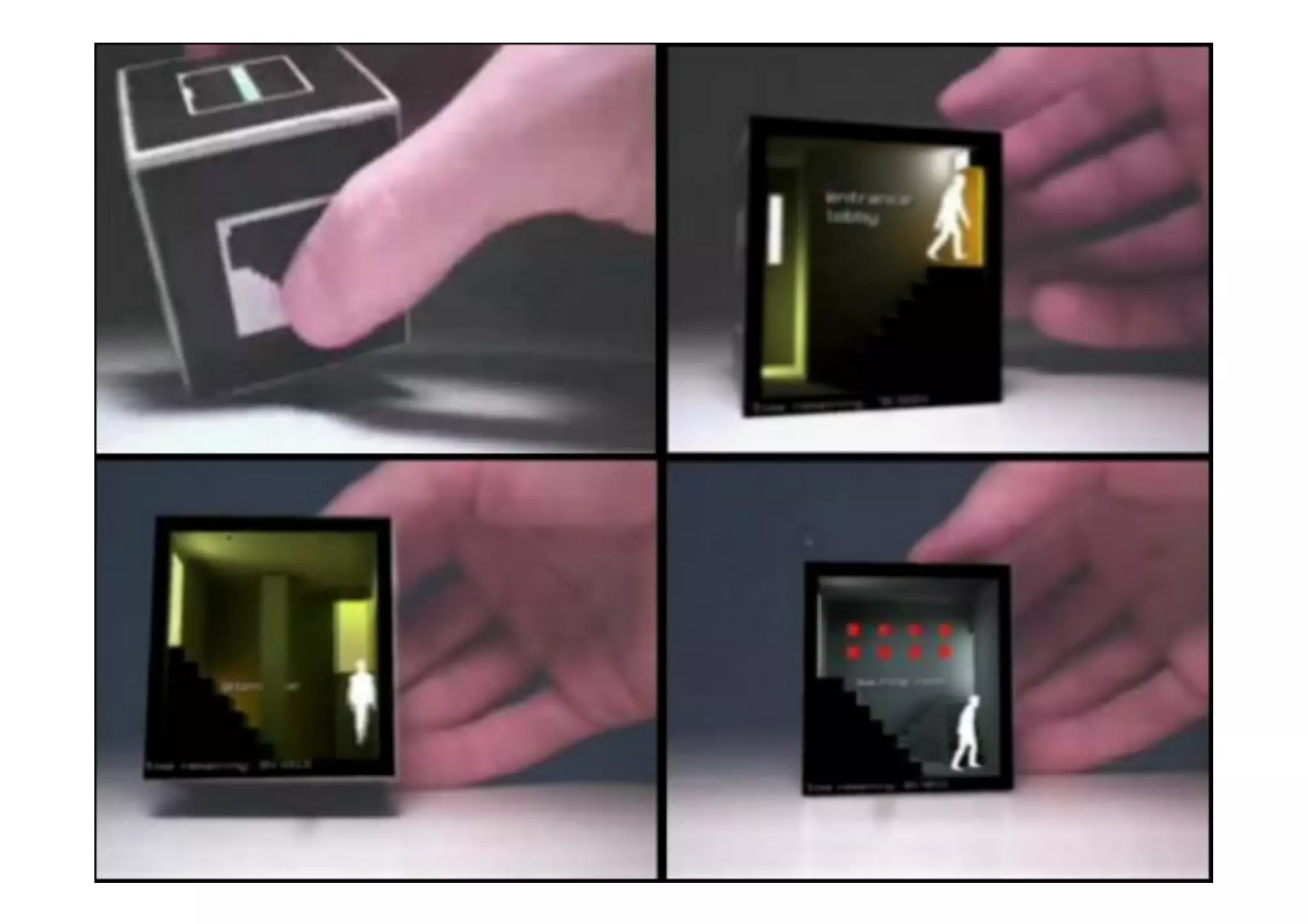
Exploring physical components, virtual elements, and interaction paradigms in a block-based AR game.
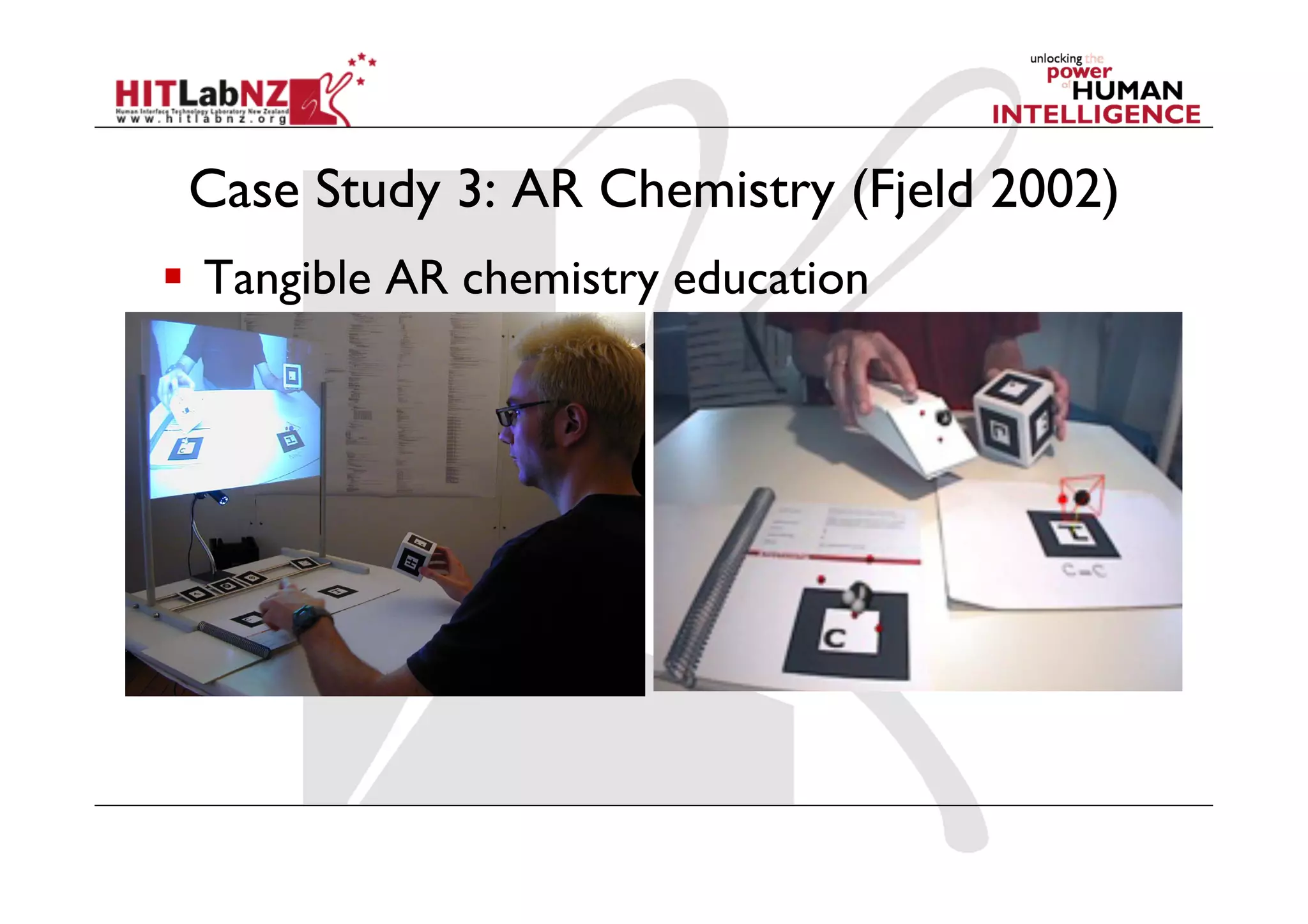
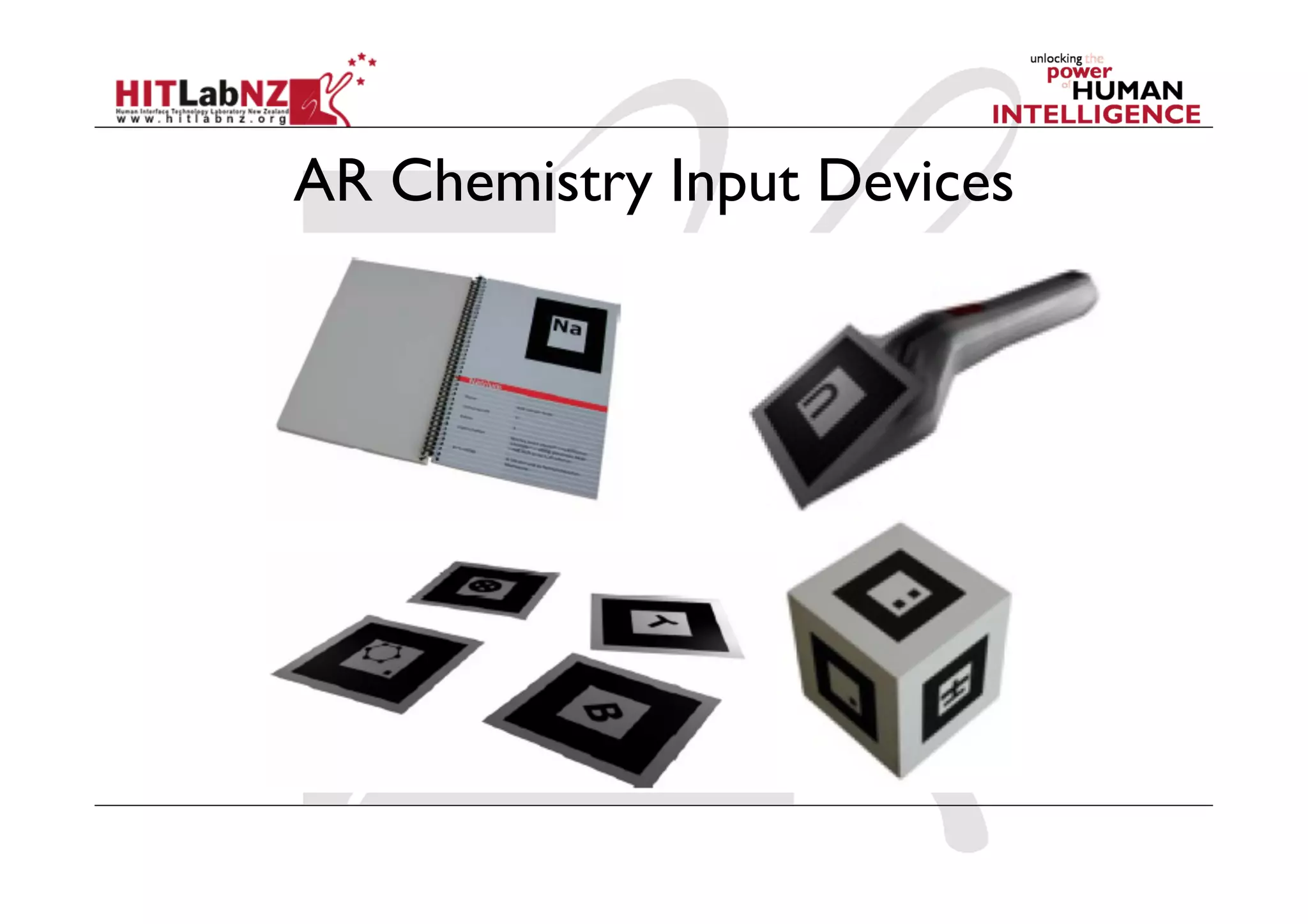
AR application designed for chemistry education, allowing hands-on molecule building with AR markers.
Examining designs supporting smooth transitions from reality to virtual reality using tangible and virtual elements.
Discussing Milgram’s Continuum on mixed reality, emphasizing the need for interfaces that support both AR and VR.
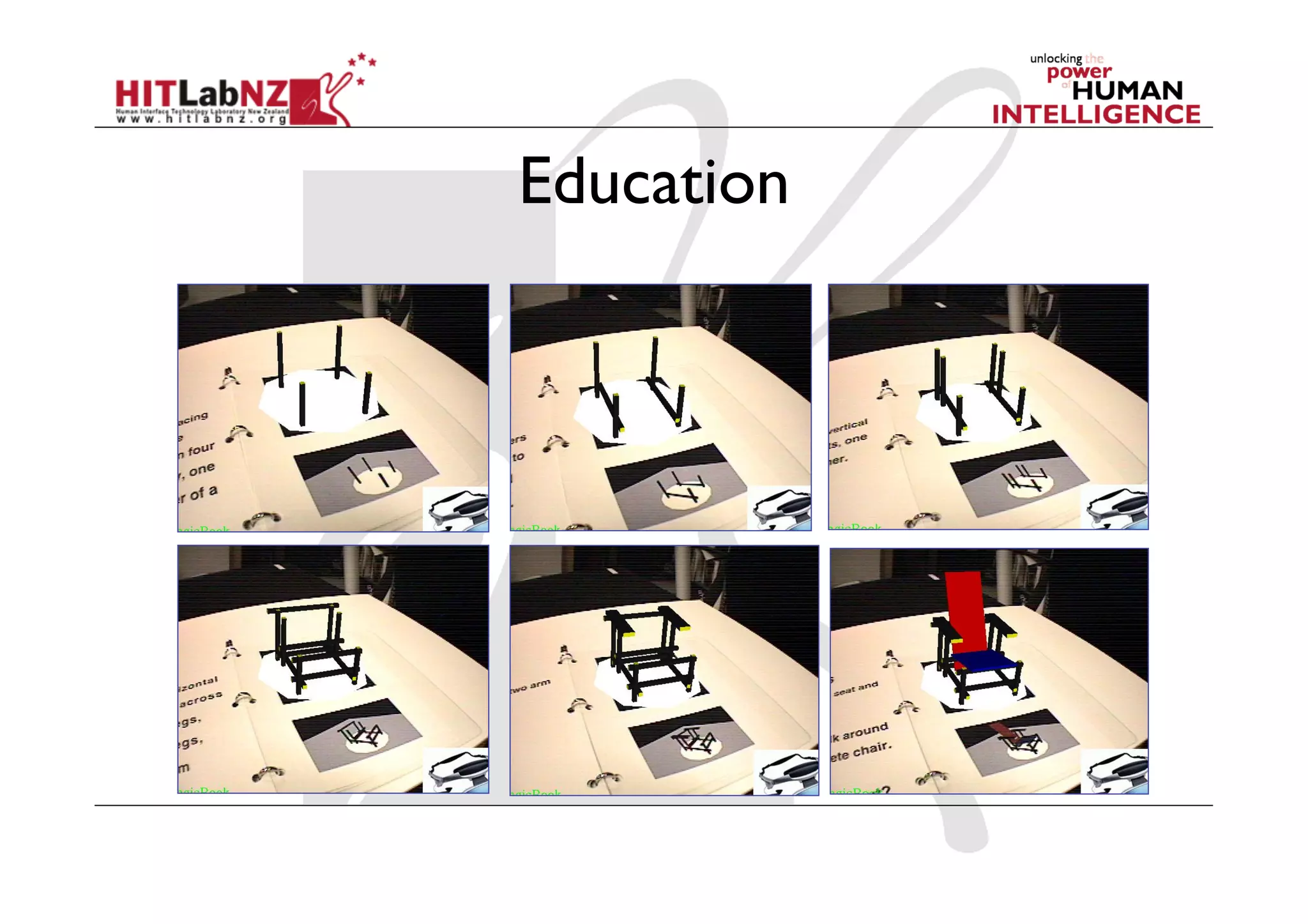
MagicBook aims for seamless reality-virtuality transitions and supports collaborative interactions.
Features of MagicBook include flexible perspective views and invisible integration of digital content.
Collaboration levels in AR, considering physical, AR, and VR elements, emphasizing user independence.
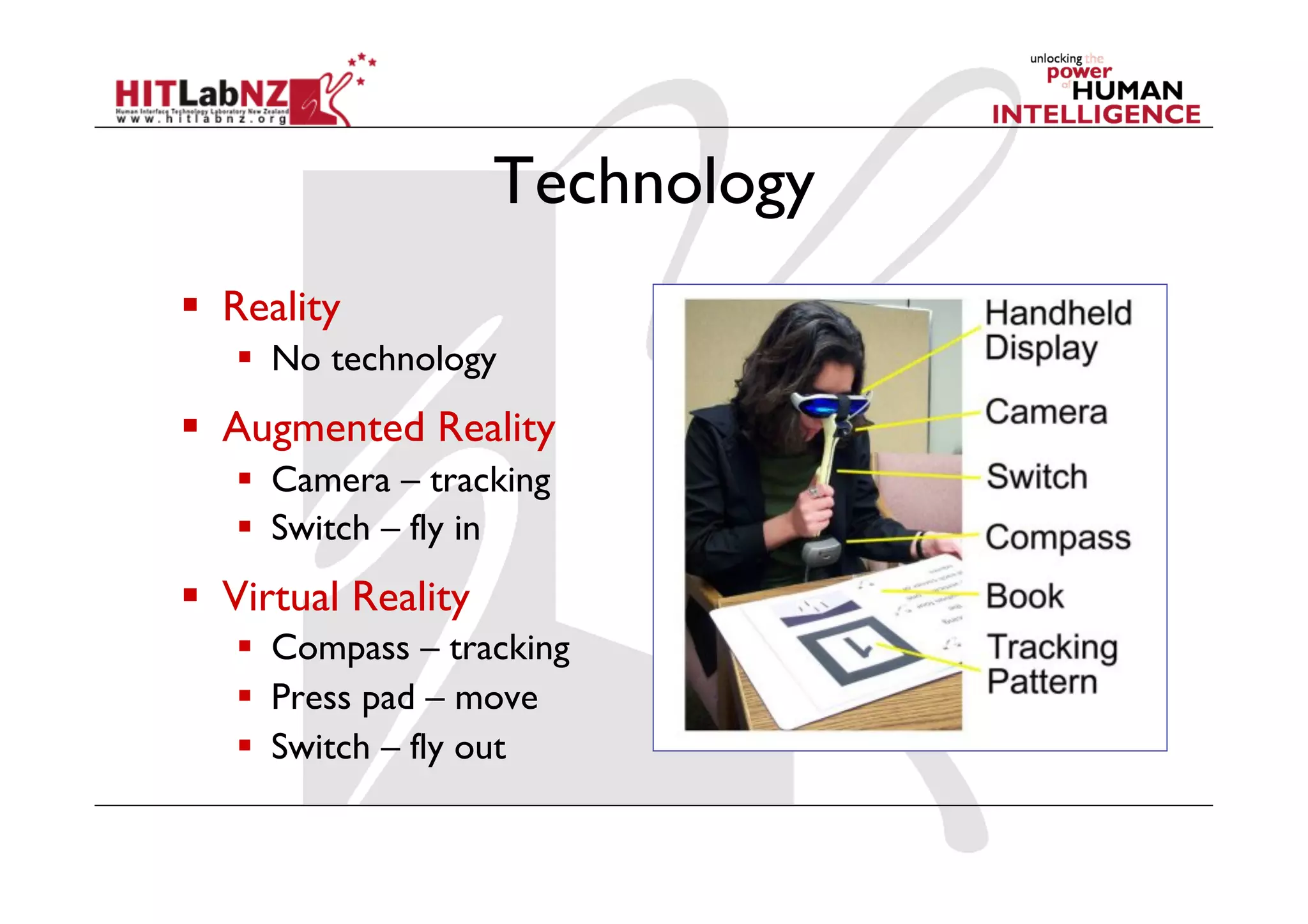
Outlining the technology requirements for AR and VR experiences, detailing practical components underlining transitions.
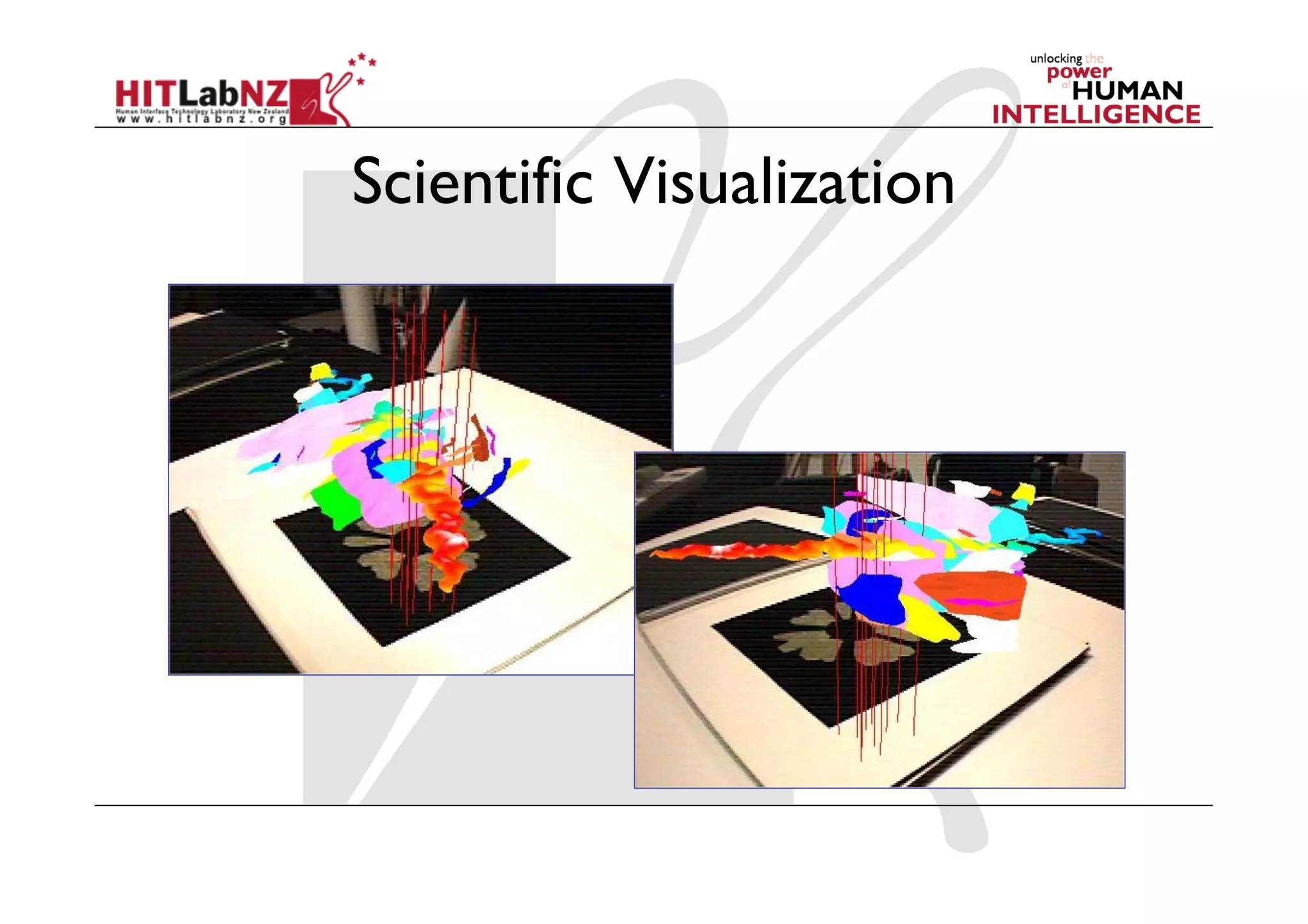
Applications of AR in scientific visualization, emphasizing its role in education and training within various fields.
Summary of essential design considerations for AR interfaces: physical and virtual components, and interface metaphors.
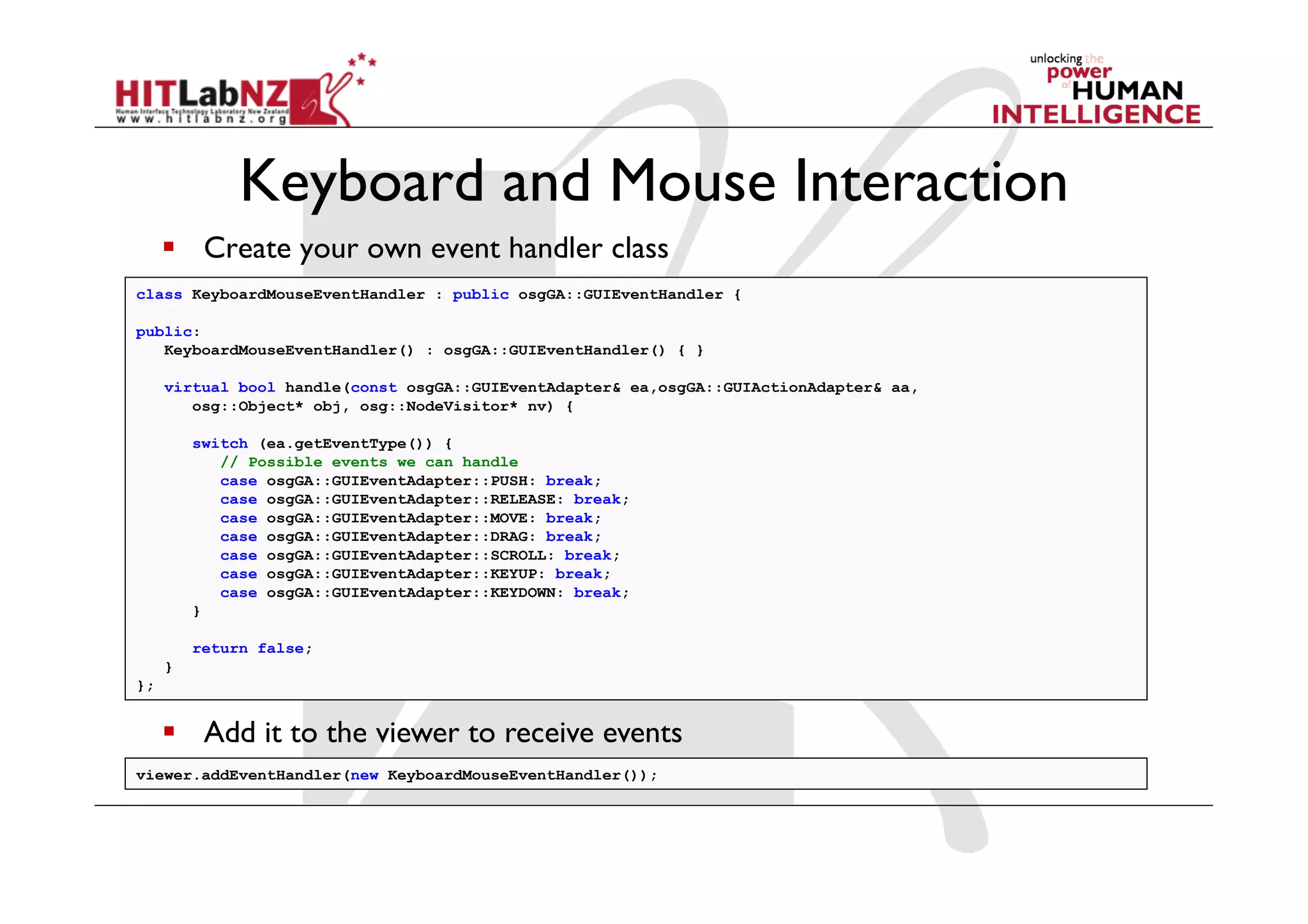
Introduction to OSGART, focusing on keyboard and mouse interactions within augmented reality applications.
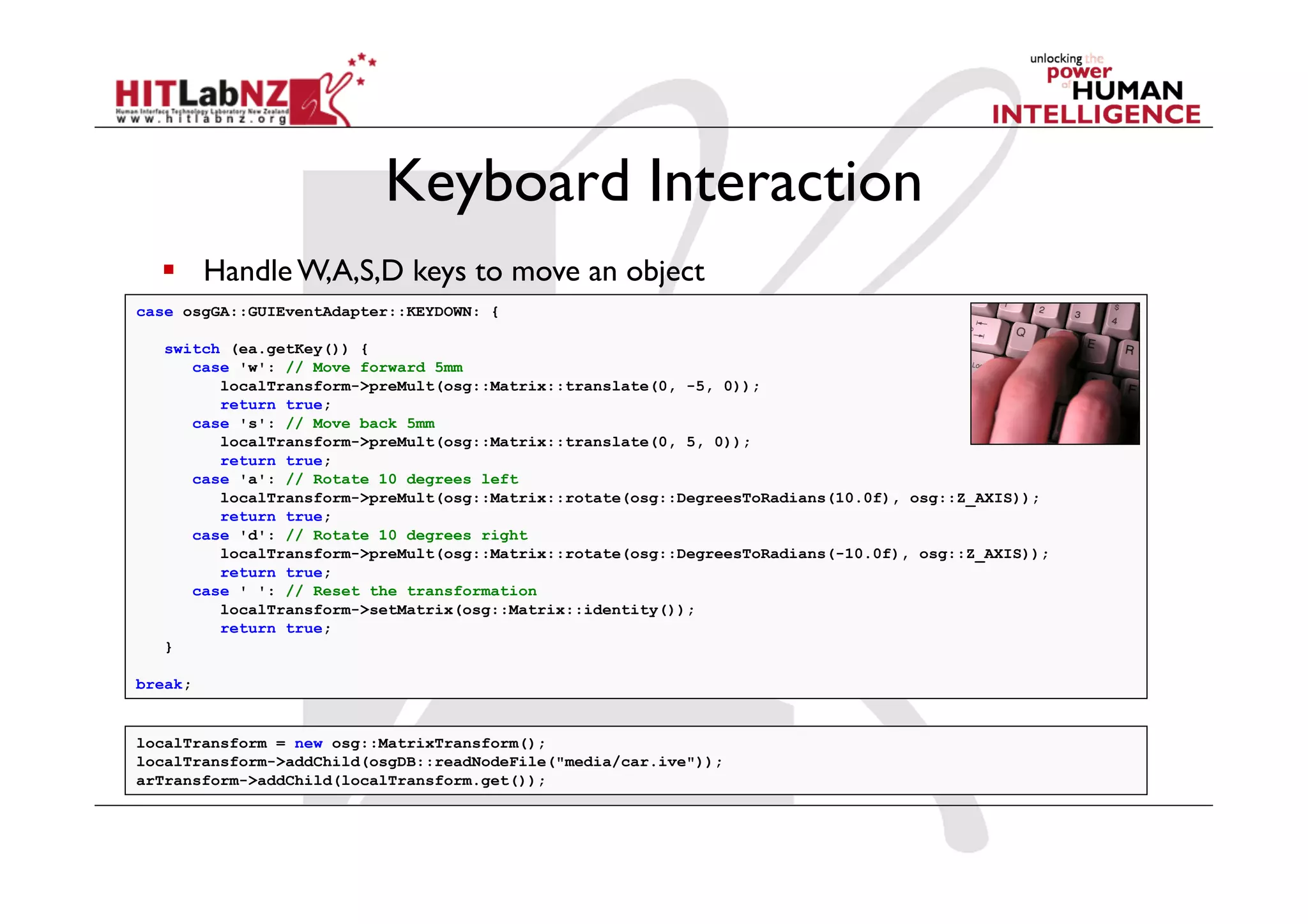
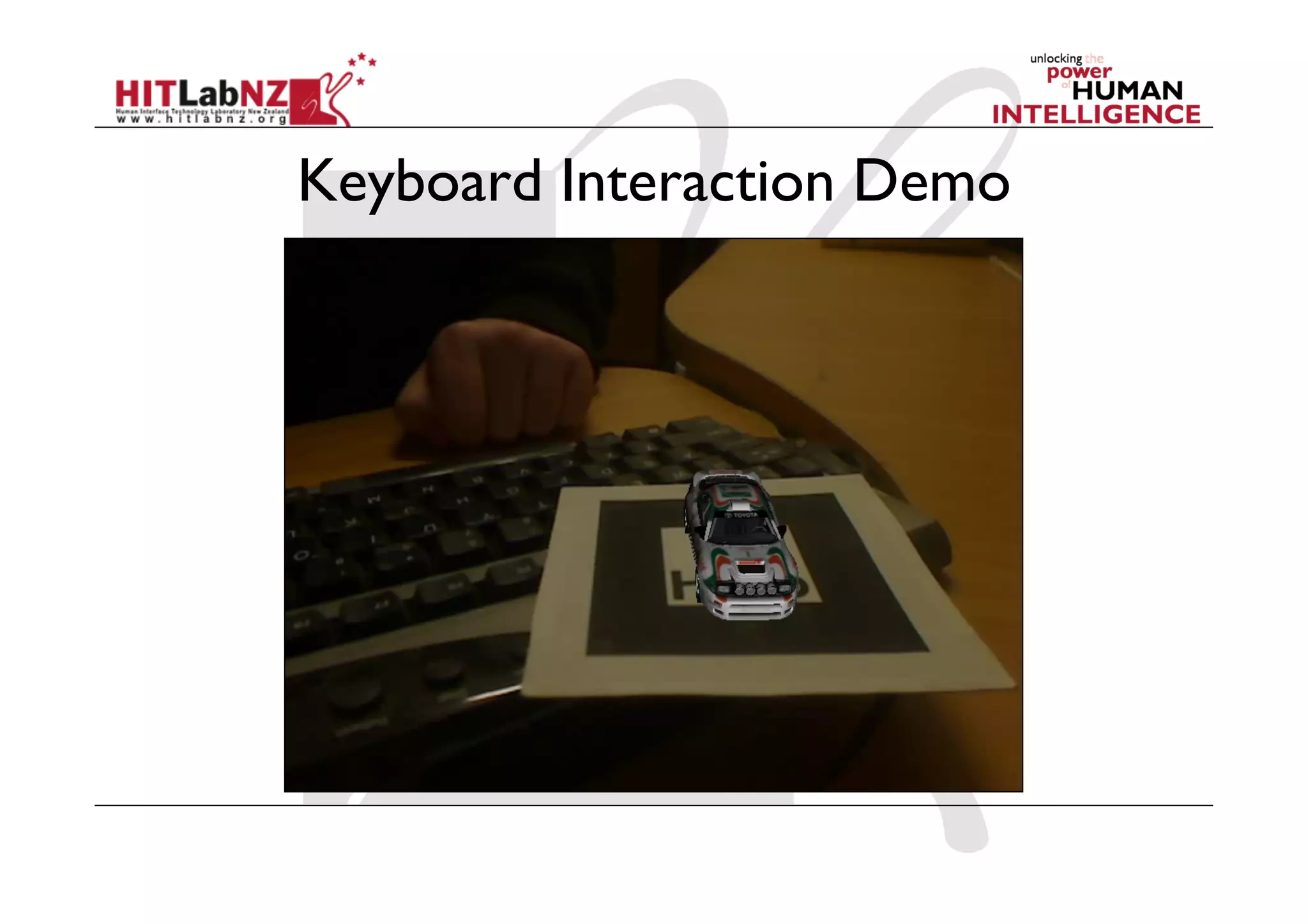
Demonstrating techniques for object manipulation through keyboard input in AR environments.
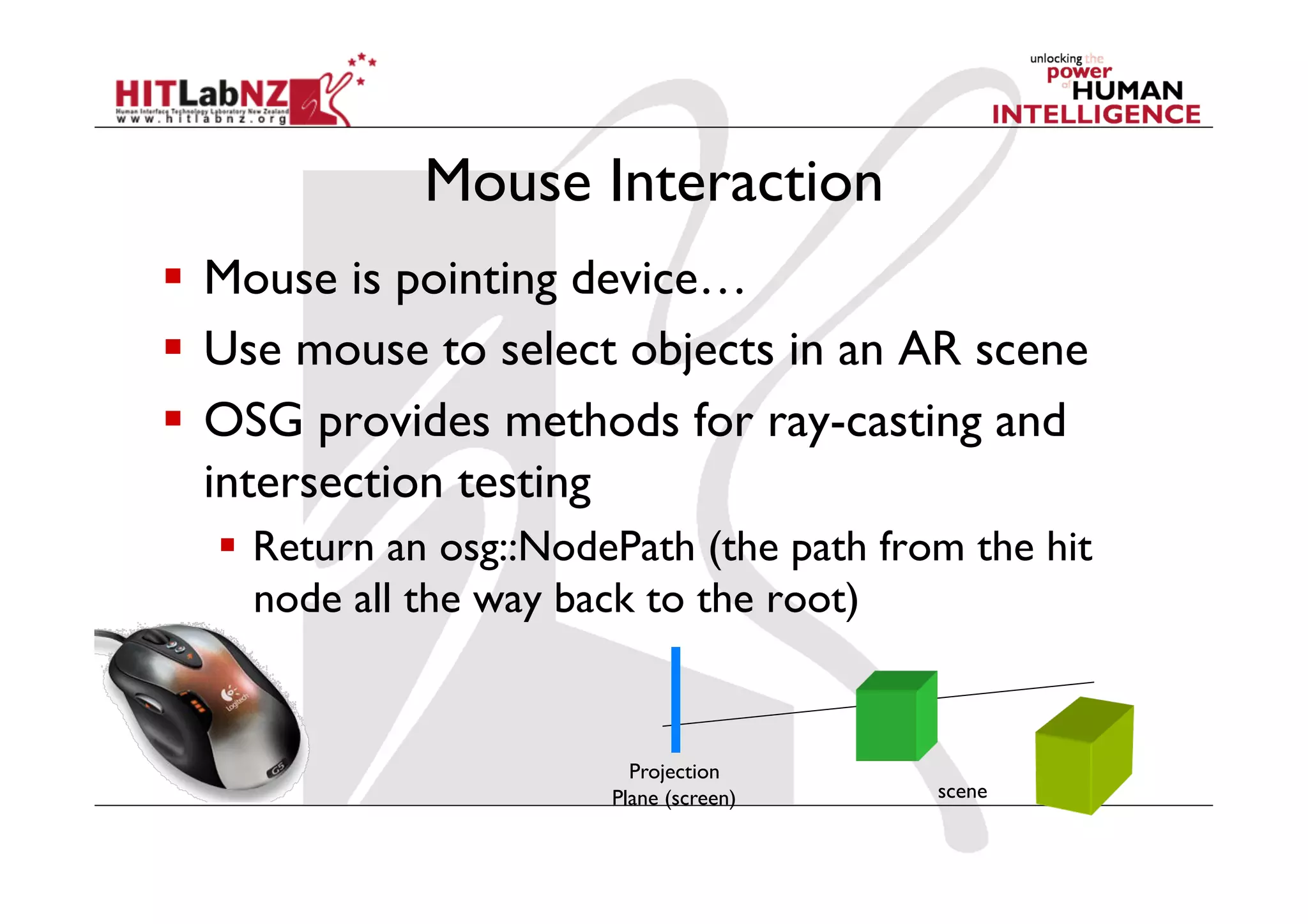
Exploring mouse interaction for object selection in AR, focusing on methods like ray-casting.
Techniques based on proximity calculations between markers for enhanced interactivity in AR.
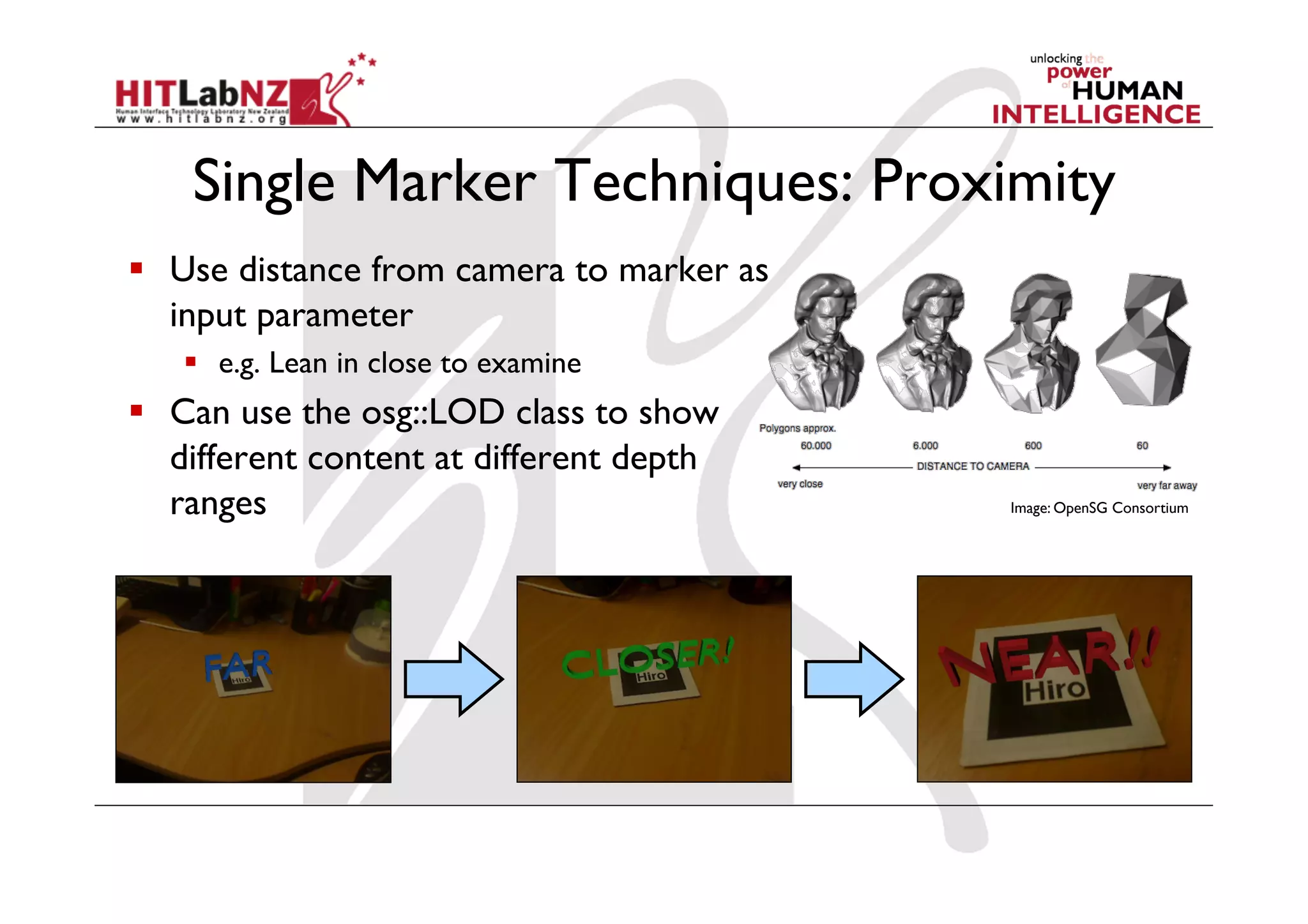
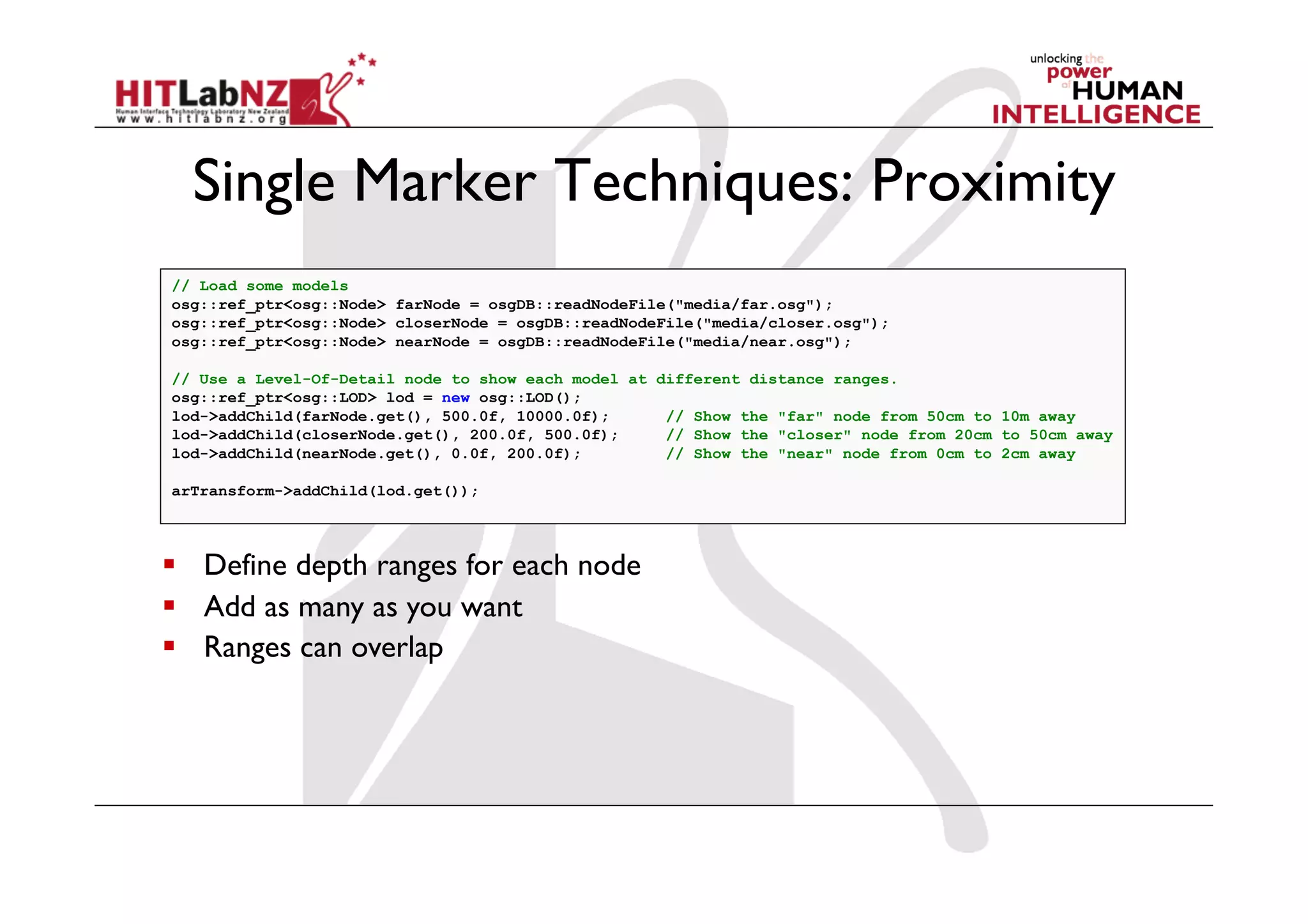
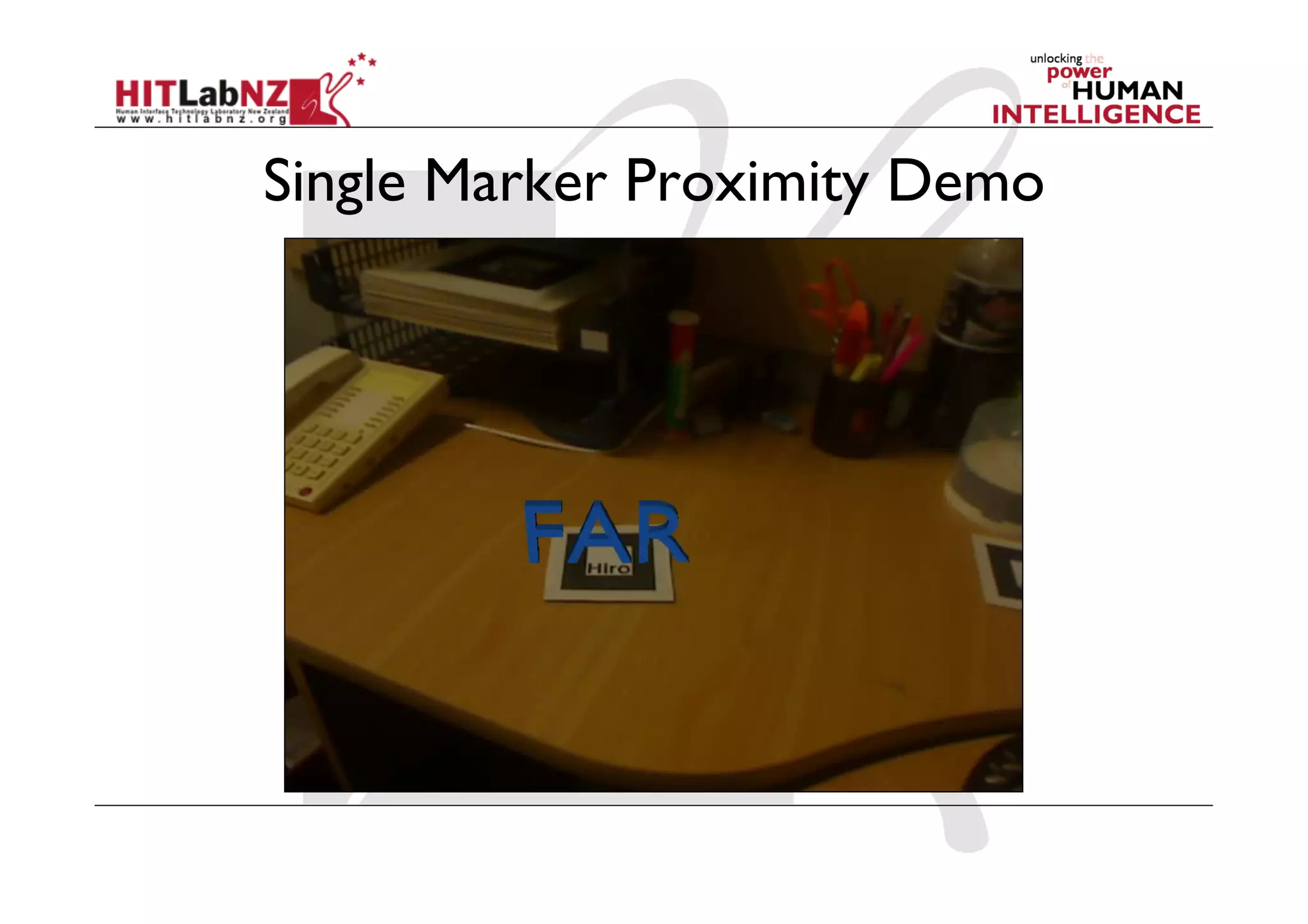
Using depth ranges for single markers to redefine interactions in augmented spaces.
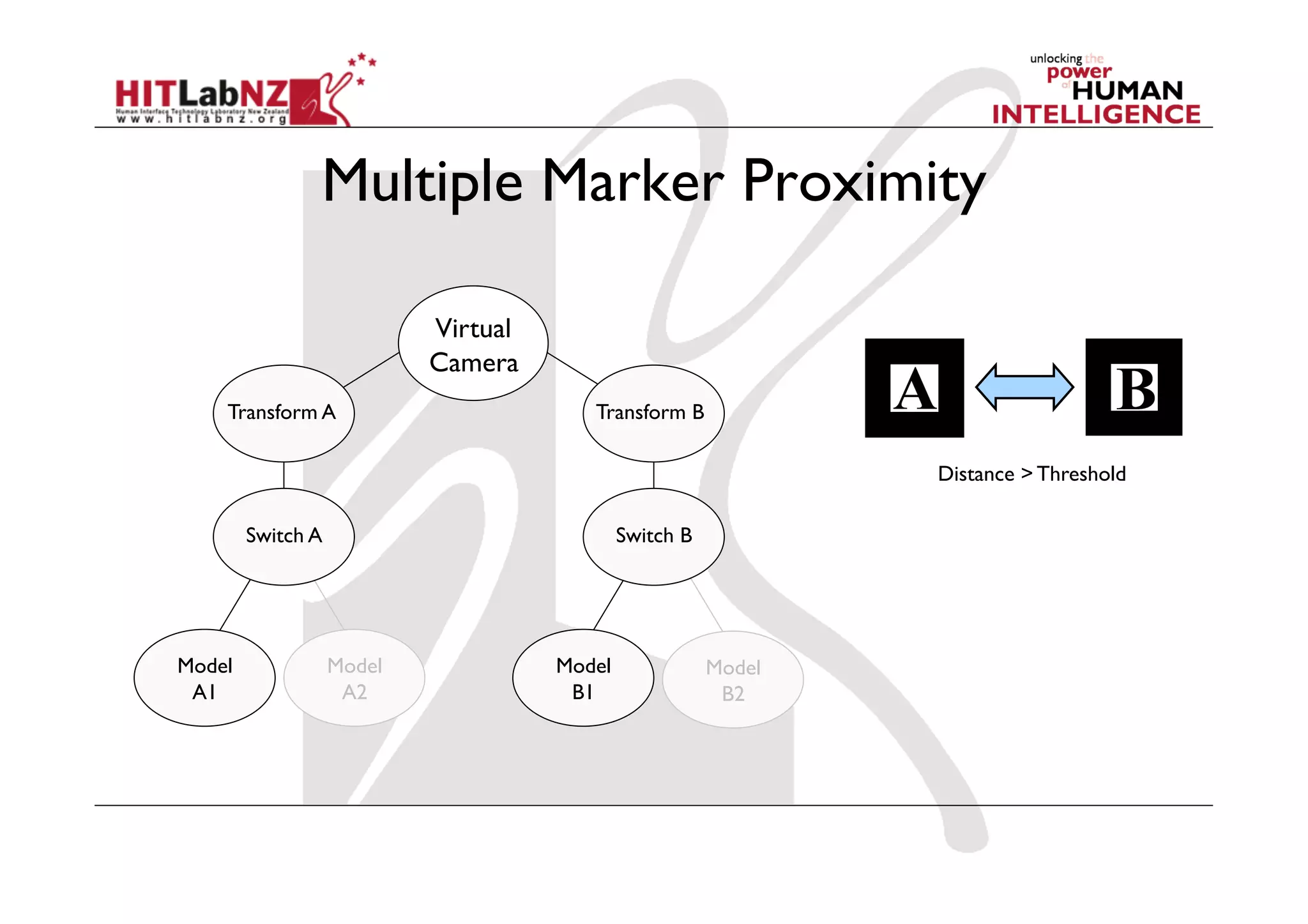
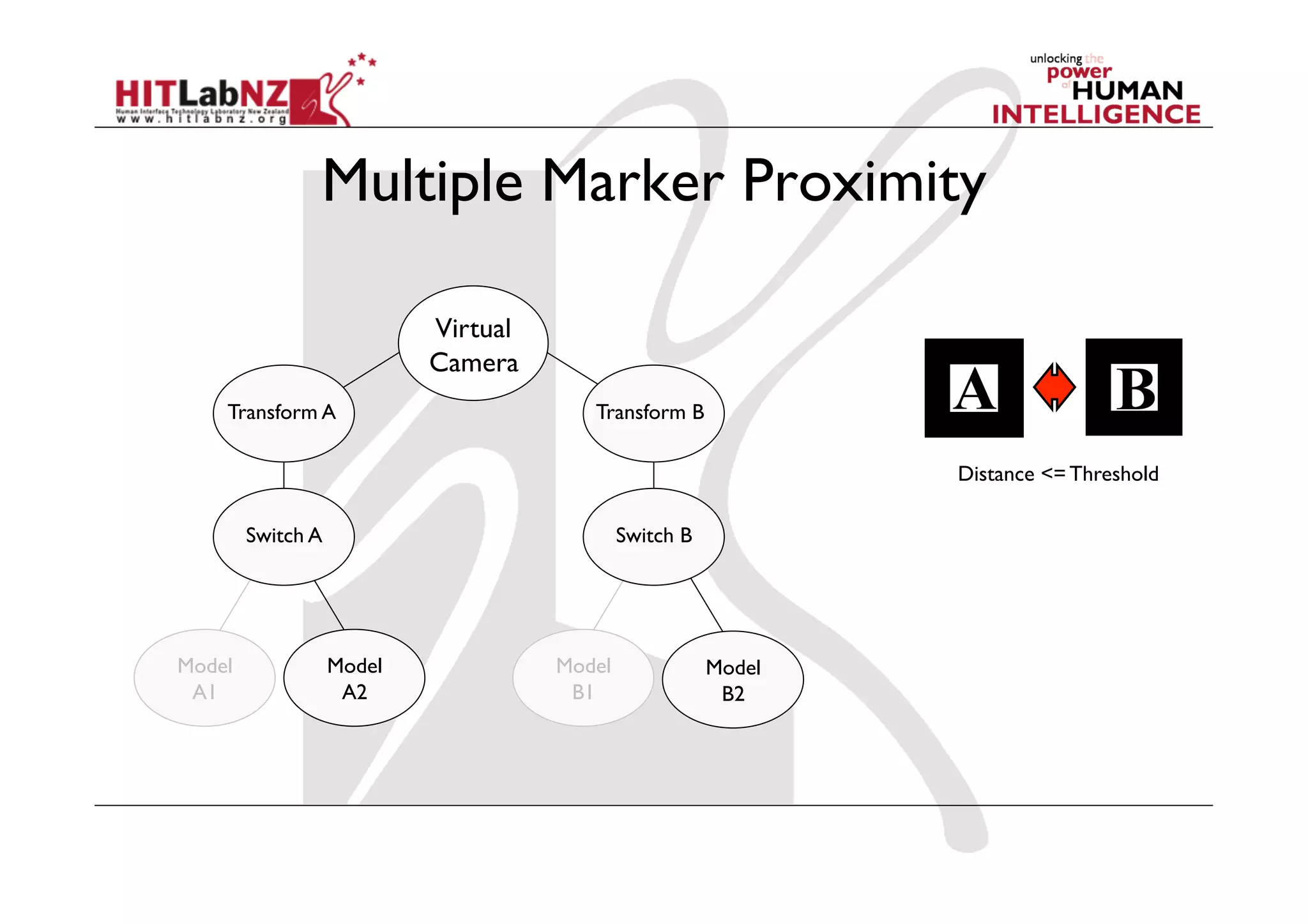
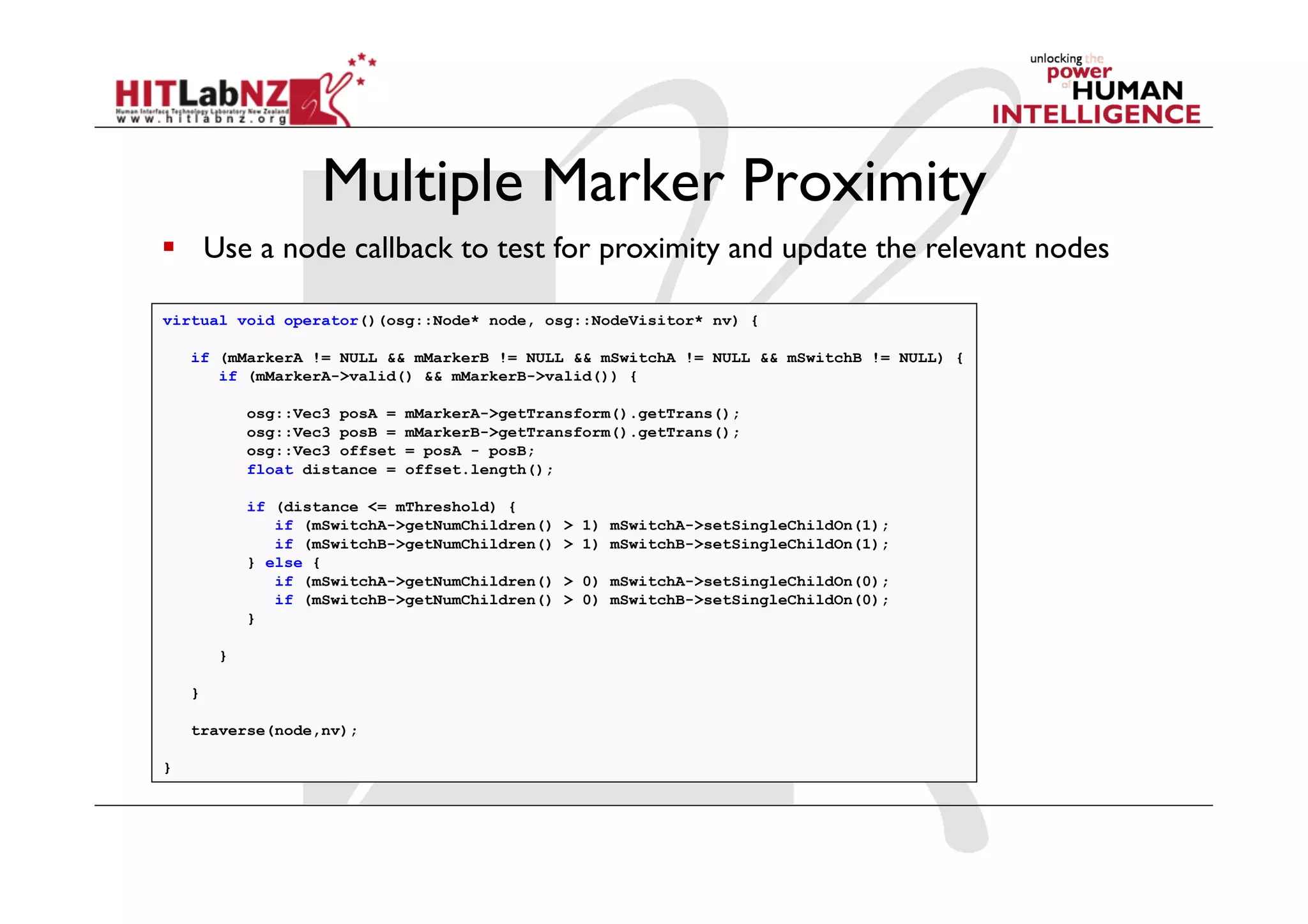
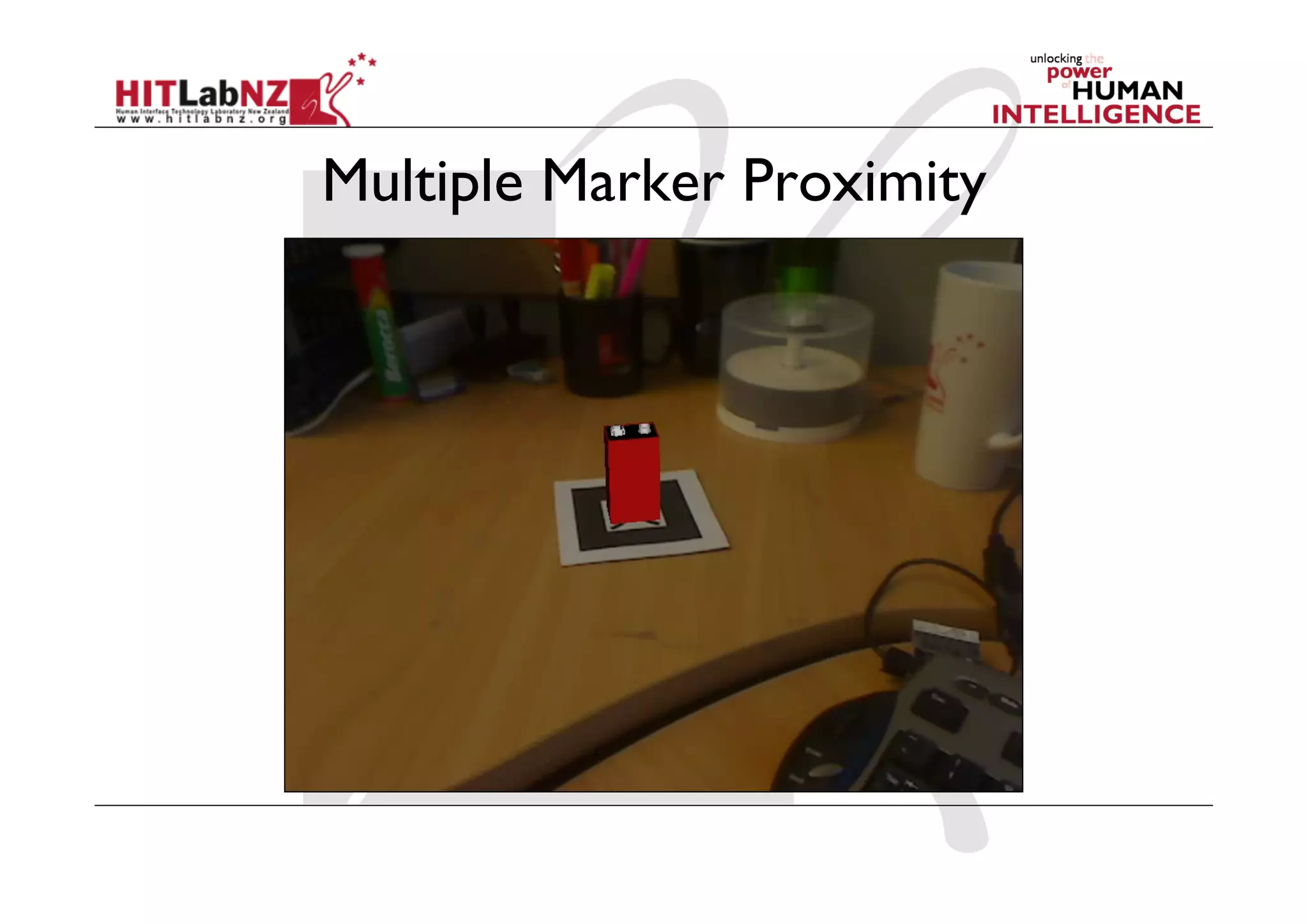
Explains interaction models based on distance between multiple AR markers for tangible interfaces.
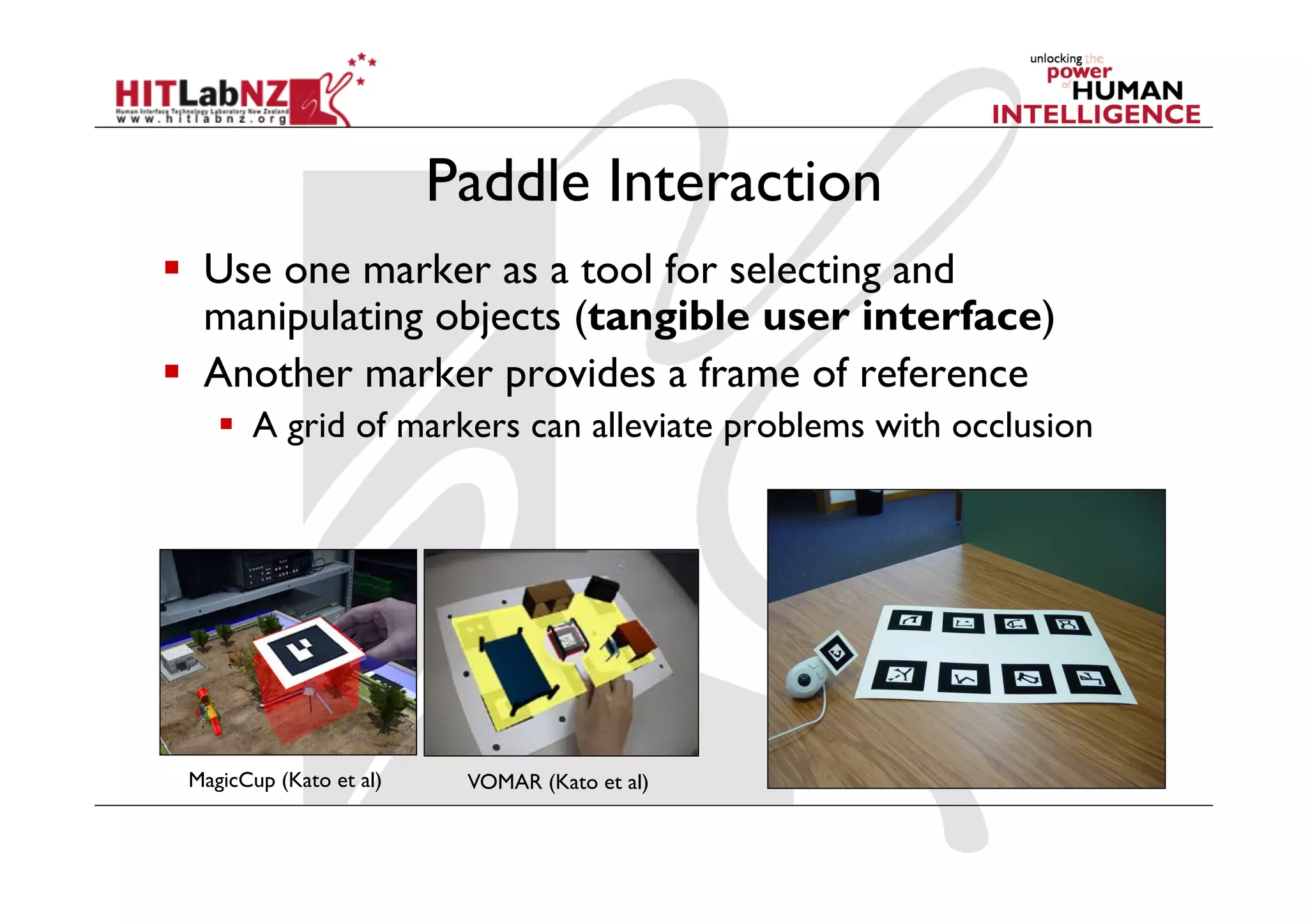
Techniques for using markers as tools in AR environments, allowing manipulation and selection of objects.
Code requirements for developing AR interfaces integrating tangible components for enriched user experiences.
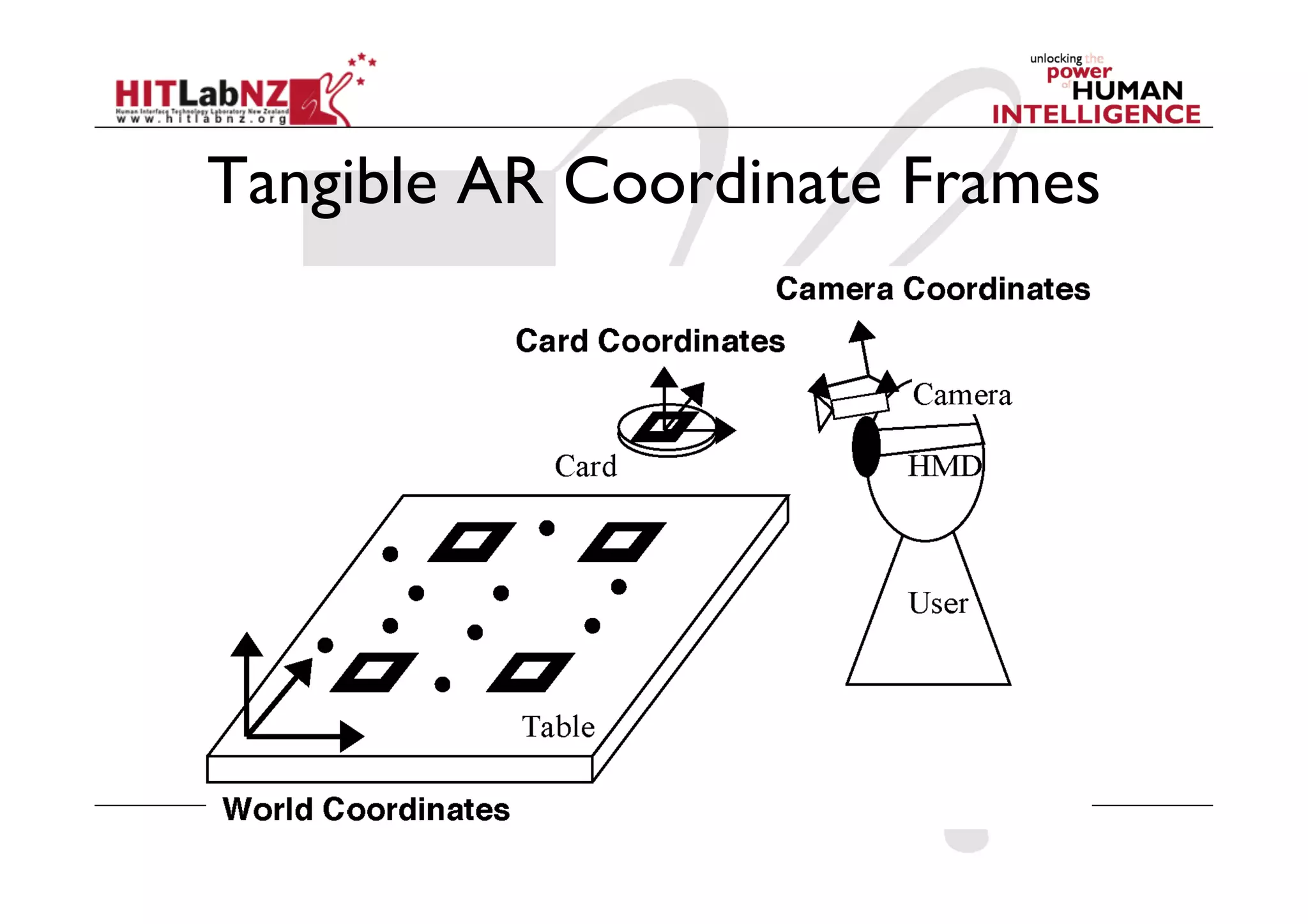
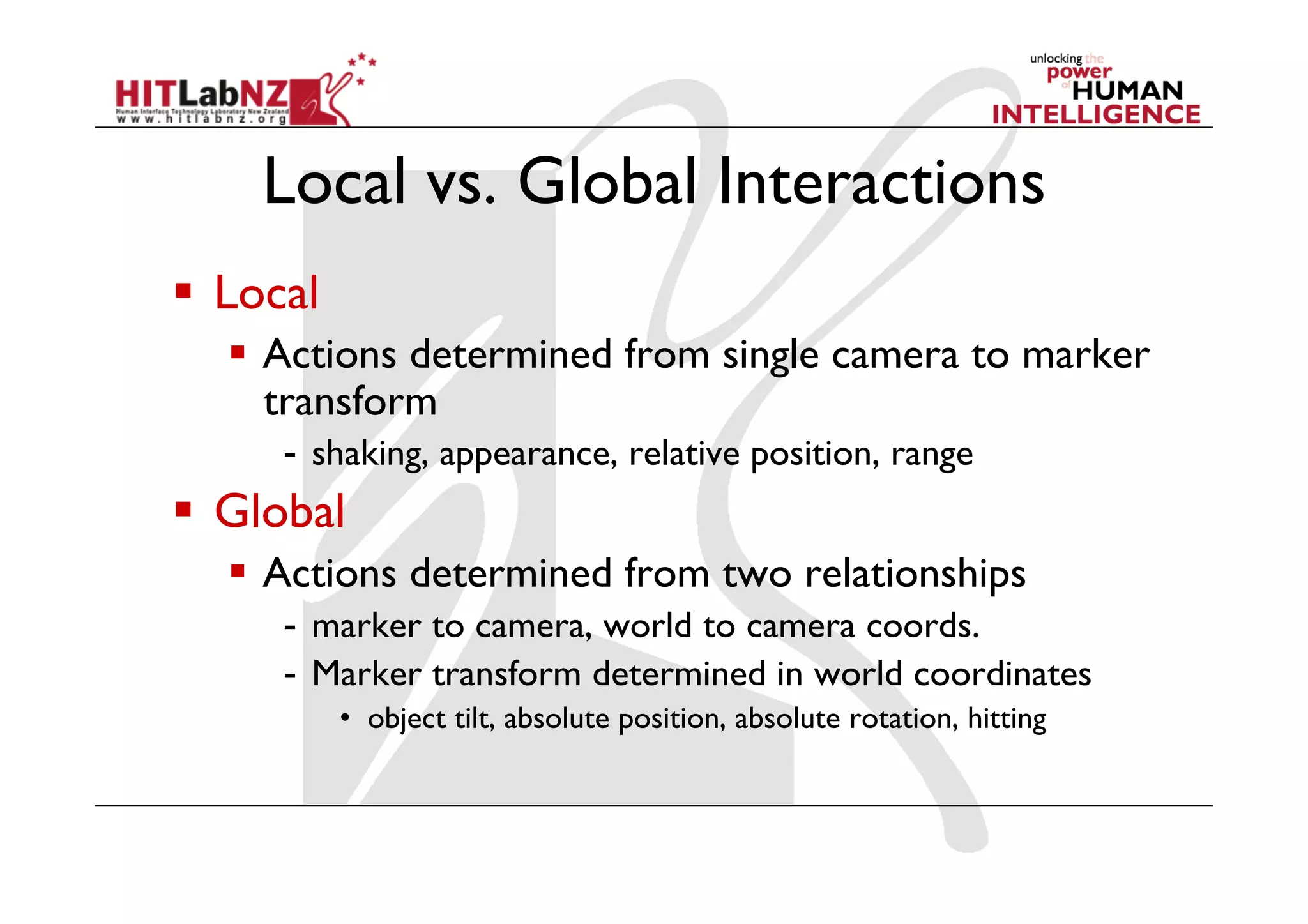
Differentiating actions defined by marker proximity versus global relationships in augmented interactions.
Sample code approach for calculating camera to marker distances to facilitate interaction scenarios in AR.
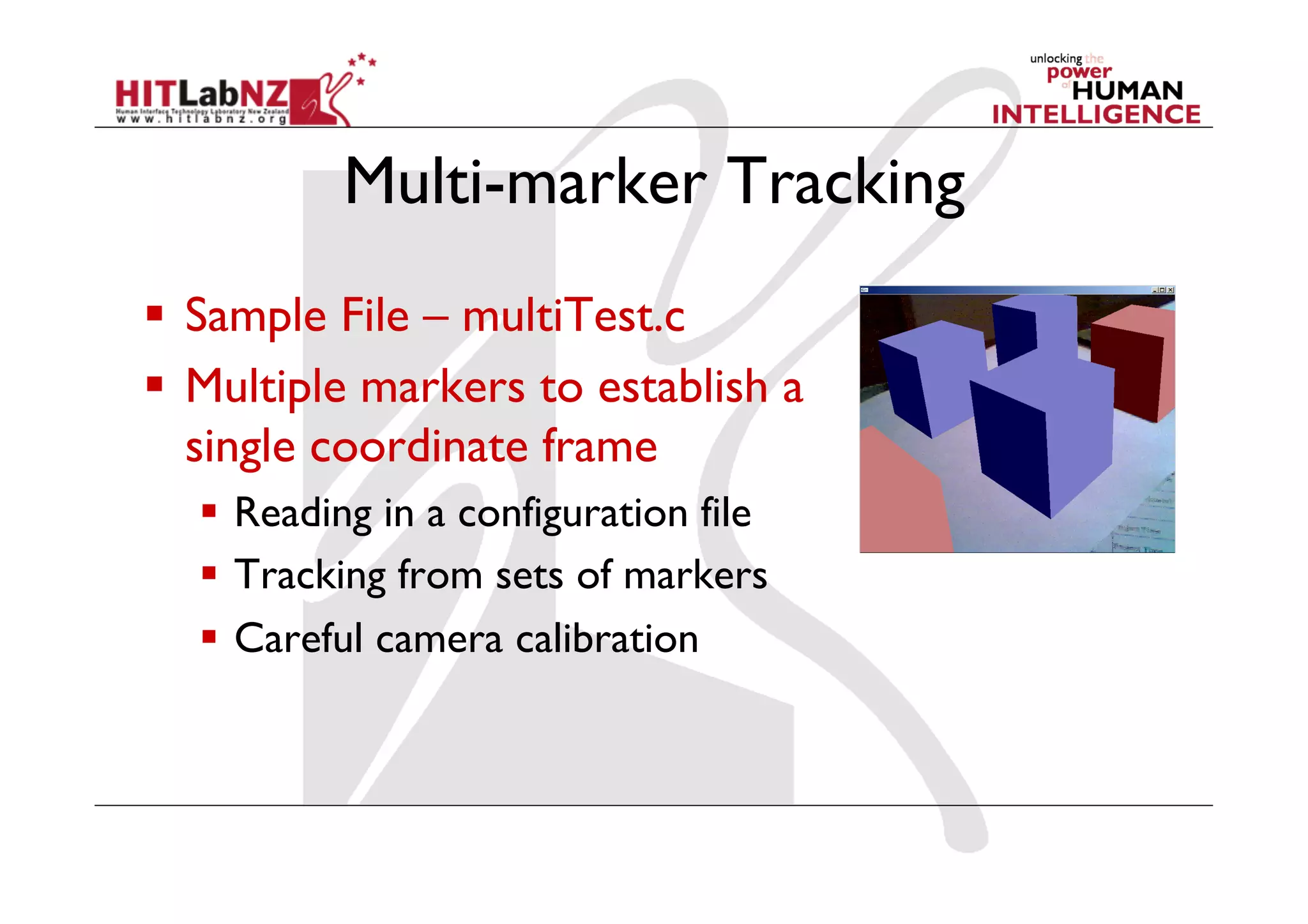
Discussion on loading and managing multiple markers for a cohesive interaction framework in AR.






































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)















