Download as PDF, PPTX
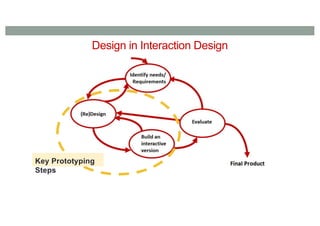
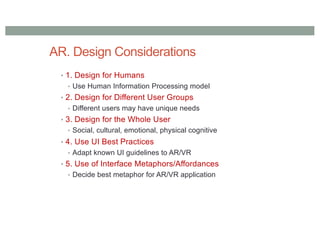
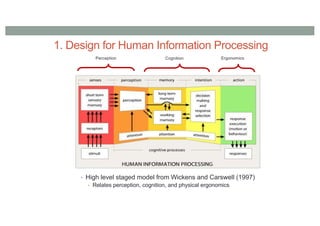










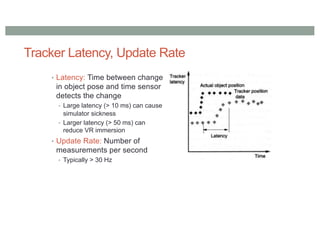




The document provides an overview of design principles and patterns in augmented reality (AR) and virtual reality (VR) interactions, emphasizing the importance of human information processing, cognitive ergonomics, and interface metaphors. It discusses the challenges and best practices for designing AR and VR systems, including considerations for physical and virtual affordances, usability, and immersive experiences. The text also highlights the evolving nature of design guidelines and emphasizes the significance of empirical research and iterative testing in developing effective AR/VR interfaces.












































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)










