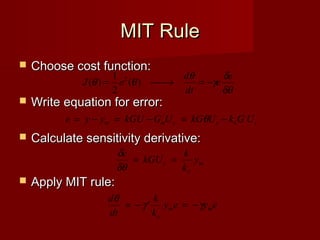
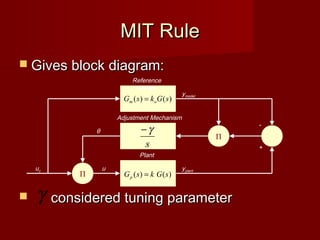
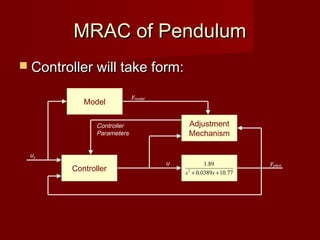
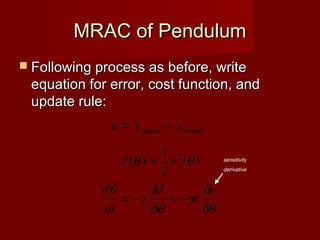
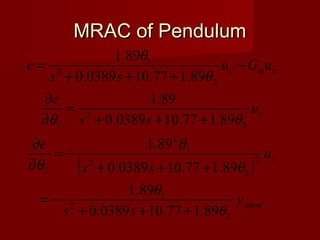
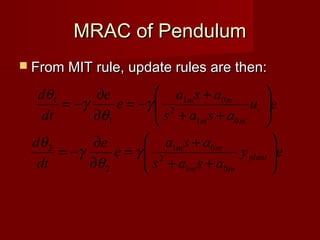
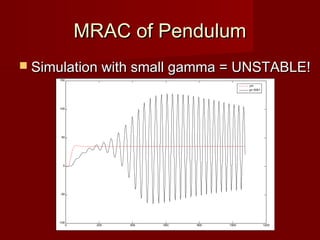
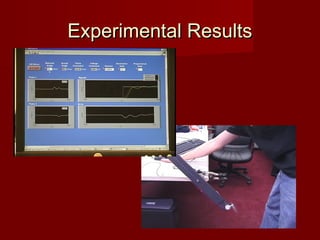
This document discusses model reference adaptive control (MRAC). It provides an overview of the concept, the MIT rule for updating controller parameters, and an example of applying MRAC to control the position of a pendulum. Simulation and experimental results show the controller requires proportional-derivative feedback and tuning to stabilize the unstable pendulum system. More advanced control methods could provide better practical performance than the basic MRAC approach presented.