This document summarizes a study comparing three control methods - PID, IMC, and IMC-PID - for controlling a first-order motor-tachometer system. The key findings are:
1) IMC performs better than PID when near system limitations, as PID can exhibit reset windup causing poor control. IMC avoids this issue.
2) Both IMC and IMC-PID effectively control the system under normal operation. However, IMC has less noise than IMC-PID.
3) When a large disturbance occurs, IMC returns to the setpoint faster than IMC-PID, which overshoots due to integral windup.


![˜g(s) =
Kp
τps + 1
(5)
And the control algorithm for a first-
order process is:
q(s) =
τps + 1
Kp(λs + 1)
(6)
Combining equations 3, 5, and 6 re-
sults in:
c(s) =
τps + 1
λKp
+
1
λKps
(7)
Notice that equation 7 is simply equa-
tion 1 in the frequency domain, and both
are proportional and integral (PI) con-
trollers. The proportional control param-
eter is
τps+1
λKp
and the integration parame-
ter is 1
λKps .
2. The Motor-Tachometer
System
A. Characteristics and
Parameters
It has been shown[2] that a perma-
nent magnet DC motor can be dynam-
ically modeled using the Laplace trans-
form to establish an equation for the
transfer function between an input volt-
age and an output voltage signal. The
motor-tachometer system used in this
project consists of two gears which are
interlocked. One is driven by a signal
from a LabJack between 0 and 5 Volts;
the other is driven by the first, which
is registered by an analog tachometer
as an output voltage signal. The set-
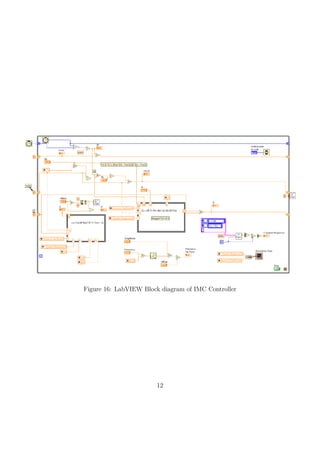
point and the system response are com-
pared in real time using an IMC con-
troller and an IMC-PID controller, im-
plemented through LabVIEW programs
found in Appendix B.
Before the programs can be effec-
tively run, there are several characteristic
parameters that must be determined for
the motor-tachometer system: the time
constant, τp, governs the speed of the re-
sponse to changes in the setpoint; the
process gain, Kp, dictates the magnitude
of the response to changes in input volt-
age; and the minimum driving voltage,
MMin, establishes the signal required to
maintain a dynamic state. Additionally,
the motor requires a minimum voltage in
order to overcome static friction and be-
gin dynamic operation. For the given ex-
perimental system, the minimum voltage
is 2.6 Volts.
B. Identifying System
Parameters
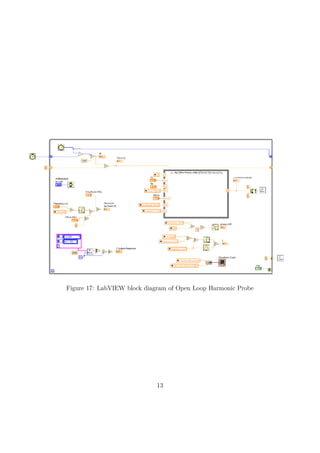
τp, Kp, and MMin are found by first,
probing the system in an open loop with
a known harmonic function, second, de-
veloping a model for how the motor re-
sponds, and, third, carrying out a simple
regression to find the best fitting param-
eters. To ensure dynamic operation, the
motor was set to follow a sinusoidal set-
point established by Equation 8.
M(θ) = Mo + MAsin(ωθ) (8)
Equation 9 establishes a functional
control algorithm for the system to fol-
low the set point.
c(θ) = Kp[(Mo − MMin)[1 − e
−θ
τp ]+
KpMA
τp(ω2 + 1
τ2
p
)
[ωe
−θ
τp +
sin(ωθ + φ)
τpcos(φ)
]
(9)
When the system reaches steady-
state, the exponential decay terms ap-
3](https://image.slidesharecdn.com/che272-170328204655/85/Process-Control-Final-Report-3-320.jpg)
![proach zero and the response simplifies
to Equation 10.
c(θ) = Kp[(Mo − MMin)+
MA
τ2
p ω2 + 1
sin(ωθ + φ)
cos(φ)
]
(10)
The characteristic parameters τp,
Kp, and MMin were regressed by mini-
mizing the sum of the squared residuals
between the actual system response and
the calculated response using Equation 9.
Table 1 displays the IMC control param-
eters found using this method, and Table
2 displays the IMC parameters found to
work over the widest range of input fre-
quencies and the IMC-PID proportional
and integral control parameters from
them. Also displayed in Table 2 are PID
parameters found empirically.
Table 1: Parameters (top) are fixed
inputs, system characteristics (mid-
dle) are altered to minimize the sum
of the squared residuals (bottom)
between the system response and the
model.
C. Tuning λ
Once the characteristic parameters
of the first-order system are determined,
these values can be used in the IMC al-
gorithm and the program can be exe-
cuted to determine how well the system
responds to a setpoint. The only other
parameter that needs to be tuned is λ,
a tunable time constant for the output
response. As λ is decreased, the system
will respond more quickly to error. How-
ever, for processes where disturbances are
frequent, a small λ may cause the con-
troller to over correct and lead to poor
process control because of this noise am-
plification effect. In these cases, a more
robust model may be needed which will
in effect be able to “ignore” more process
noise. To institute a more robust model,
all that is needed is a larger λ. The opti-
mal value of λ for the motor system was
found to be 0.1, and this value was used
to calculate the IMC-PID parameters in
Table 2.
PID IMC IMC-PID
kp = 1.44 τp = 0.85 kp = 2.17
ki = 2.5 Kp = 3.89 ki = 2.57
kd = 0.30 MMin = 2.43V kd = 0
Table 2. Parameters that yielded best
control
3. Results
A. Comparison of PID, IMC,
and IMC-PID Controllers
These three control strategies were
compared at the same operating condi-
tions using the parameters in Table 2
to see which gave the most accurate re-
sponse. The conditions were as follows:
after reaching a steady-state the con-
trollers set the motor to follow a sine
wave of frequency 1.2 Hz, amplitude 1.25
Volts, and an offset of 2.75 Volts. At least
two periods at a time were captured in
the following figures.
4](https://image.slidesharecdn.com/che272-170328204655/85/Process-Control-Final-Report-4-320.jpg)