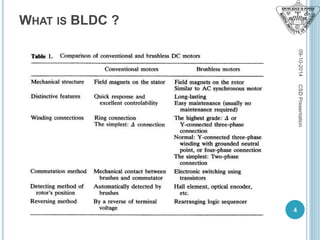
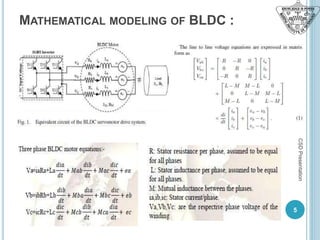
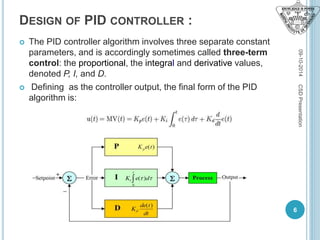
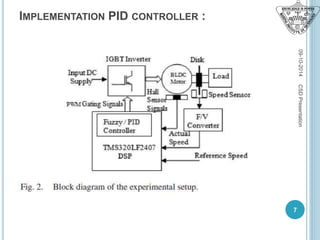
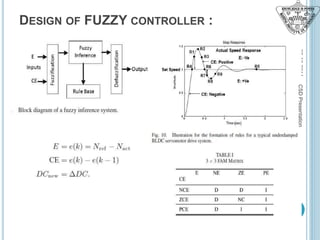
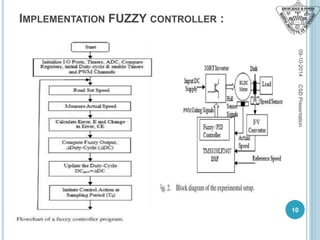
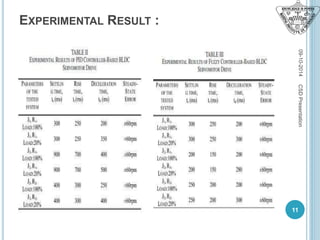
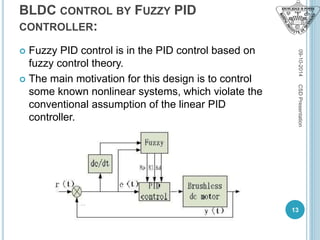
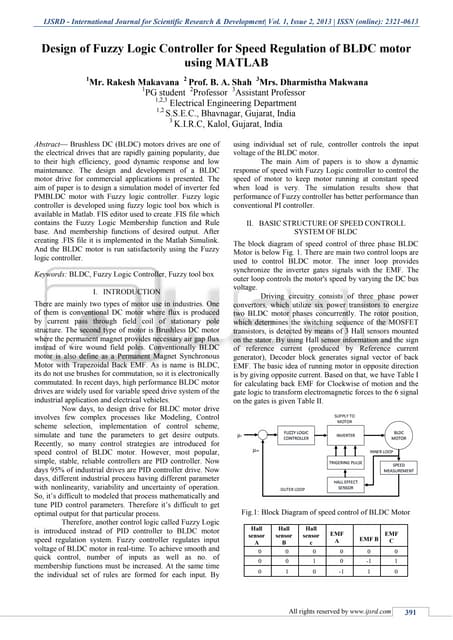
This document compares PID and fuzzy logic control methods for controlling brushless DC motors. It provides the mathematical model of a BLDC motor and describes the design and implementation of PID and fuzzy logic controllers. Experimental results show that while PID controllers perform adequately, fuzzy logic controllers can better handle nonlinearities and parameter variations. A fuzzy PID controller is also proposed to take advantage of both methods for robust BLDC motor speed control.


































































![[000007]](https://cdn.slidesharecdn.com/ss_thumbnails/000007-211028000533-thumbnail.jpg?width=640&height=640&fit=bounds)



















