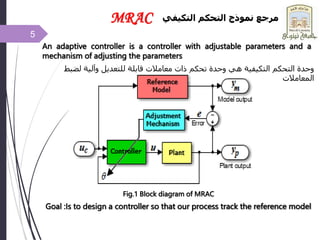
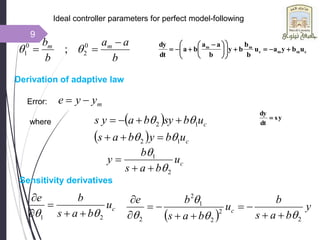
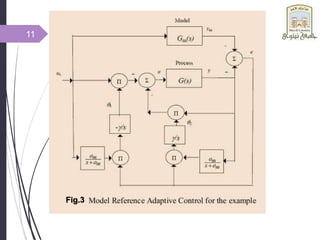
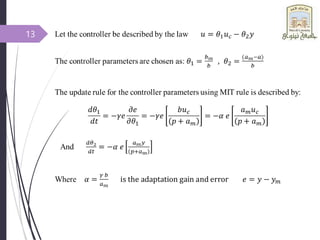
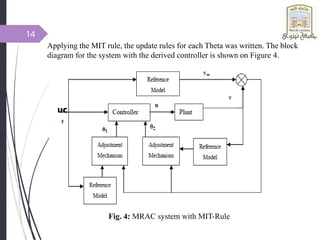
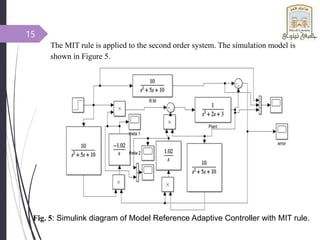
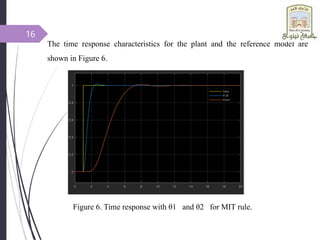
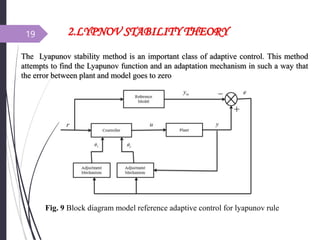
This document introduces adaptive control and model reference adaptive control (MRAC). It discusses two methods for parameter adaptation in MRAC - the MIT rule and Lyapunov stability theory. The MIT rule uses a gradient descent approach to minimize the error between the plant and reference model. Lyapunov stability theory finds a Lyapunov function and adaptation mechanism to drive the error to zero. Examples are provided to illustrate applying each method to an adaptive controller for a second order system. Simulation results show the plant output tracking the reference model in both cases.