Download as PDF, PPTX




![with
known
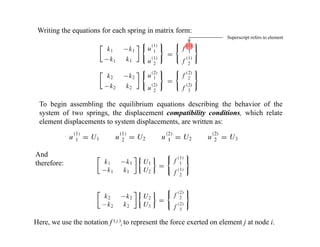
{F} = [K] {X}
unknown
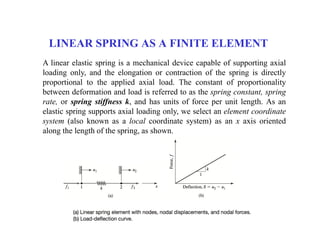
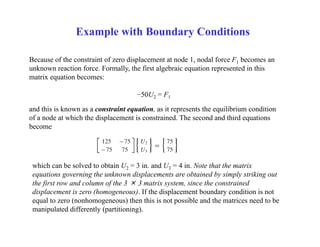
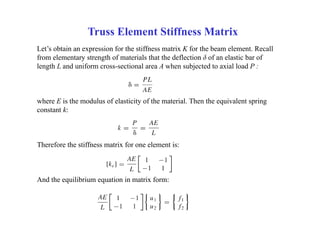
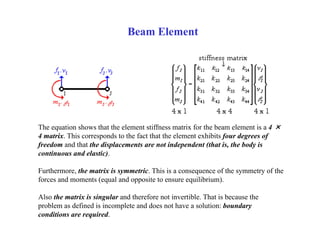
The equation shows that the element stiffness matrix for the linear spring element
is a 2 × 2 matrix. This corresponds to the fact that the element exhibits two nodal
displacements (or degrees of freedom) and that the two displacements are not
independent (that is, the body is continuous and elastic).
Furthermore, the matrix is symmetric. This is a consequence of the symmetry of
the forces (equal and opposite to ensure equilibrium).
Also the matrix is singular and therefore not invertible. That is because the
problem as defined is incomplete and does not have a solution: boundary
conditions are required.](https://image.slidesharecdn.com/introductiontofiniteelementanalysis-140130111720-phpapp02/85/Introduction-to-finite-element-analysis-25-320.jpg)




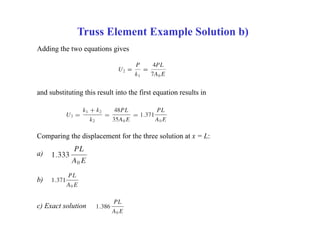



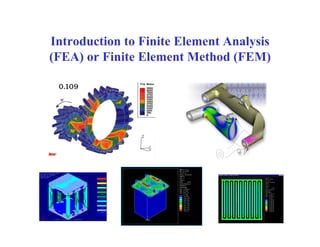
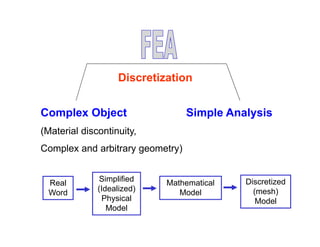
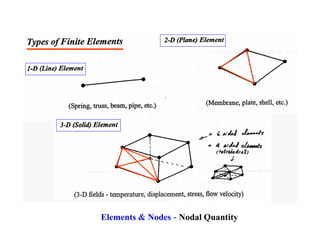
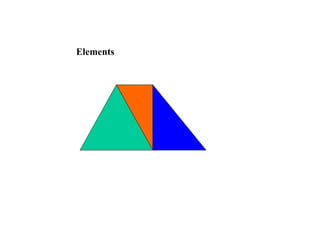
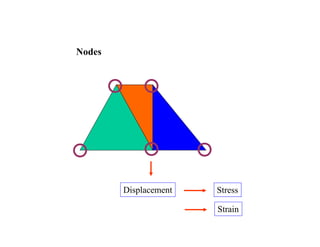
The document provides an introduction to finite element analysis (FEA) or the finite element method (FEM). It describes FEA as a numerical method used to solve engineering and mathematical physics problems that cannot be solved through analytical methods due to complex geometries, loadings, or material properties. FEA involves discretizing a complex model into smaller, simpler elements connected at nodes, then applying the governing equations to obtain a numerical solution for the unknown primary variable (usually displacement) at nodes. Secondary variables like stress are then determined from nodal displacements. The process involves preprocessing, solving, and postprocessing steps.























































































