FEA Introduction
Numericalmethod used for solving problems
that cannot be solved analytically (e.g., due to
complicated geometry, different materials)
Well suited to computers
Originally applied to problems in solid
mechanics
Other application areas include heat transfer,
fluid flow, electromagnetism
3.
Finite Element MethodPhases
Preprocessing
Geometry
Modeling analysis type
Mesh
Material properties
Boundary conditions
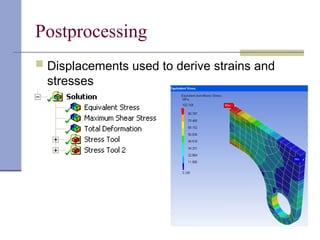
Solution
Solve linear or nonlinear algebraic equations
simultaneously to obtain nodal results
(displacements, temperatures)
Postprocessing
Obtain other results (stresses, heat fluxes)
4.
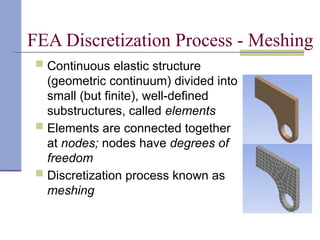
FEA Discretization Process- Meshing
Continuous elastic structure
(geometric continuum) divided into
small (but finite), well-defined
substructures, called elements
Elements are connected together
at nodes; nodes have degrees of
freedom
Discretization process known as
meshing
5.
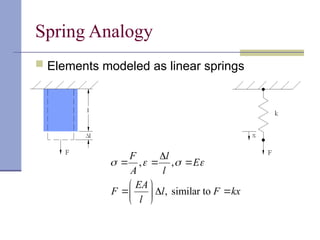
Spring Analogy
Elementsmodeled as linear springs
, ,
, similar to
F l
E
A l
EA
F l F kx
l
6.
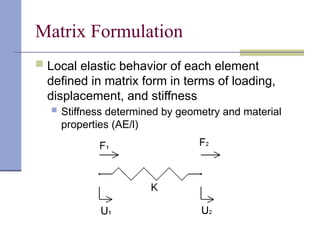
Matrix Formulation
Localelastic behavior of each element
defined in matrix form in terms of loading,
displacement, and stiffness
Stiffness determined by geometry and material
properties (AE/l)
7.
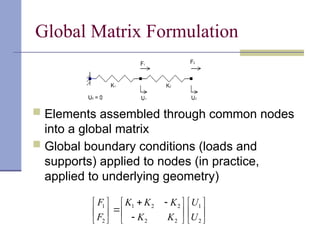
Global Matrix Formulation
Elements assembled through common nodes
into a global matrix
Global boundary conditions (loads and
supports) applied to nodes (in practice,
applied to underlying geometry)
1 1 2 2 1
2 2 2 2
F K K K U
F K K U
8.
Solution
Matrix operationsused to determine unknown
dof’s (e.g., nodal displacements)
Run time proportional to #nodes/elements
Error messages
“Bad” elements
Insufficient disk space, RAM
Insufficiently constrained
FEA Prerequisites
FirstPrinciples (Newton’s Laws)
Body under external loading
Area Moments of Inertia
Stress and Strain
Principal stresses
Stress states: bending, shear, torsion, pressure,
contact, thermal expansion
Stress concentration factors
Material Properties
Failure Modes
Dynamic Analysis
See Chapter 2 of Building Better Products with FEA, Vince Adams and
Abraham Askenazi, Onward Press, 1999
11.
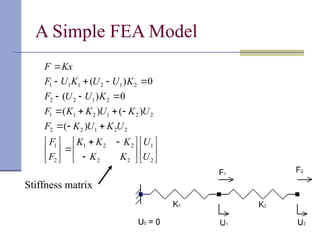
A Simple FEAModel
2
1
2
2
2
2
1
2
1
2
2
1
2
2
2
2
1
2
1
1
2
1
2
2
2
1
2
1
1
1
)
(
)
(
)
(
0
)
(
0
)
(
U
U
K
K
K
K
K
F
F
U
K
U
K
F
U
K
U
K
K
F
K
U
U
F
K
U
U
K
U
F
Kx
F
Stiffness matrix
12.
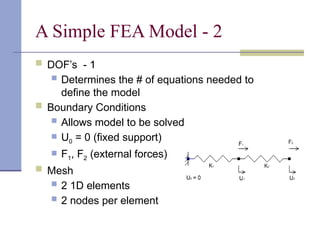
A Simple FEAModel - 2
DOF’s - 1
Determines the # of equations needed to
define the model
Boundary Conditions
Allows model to be solved
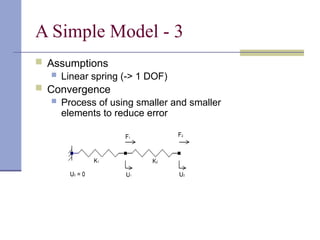
U0 = 0 (fixed support)
F1, F2 (external forces)
Mesh
2 1D elements
2 nodes per element
13.
A Simple Model- 3
Assumptions
Linear spring (-> 1 DOF)
Convergence
Process of using smaller and smaller
elements to reduce error