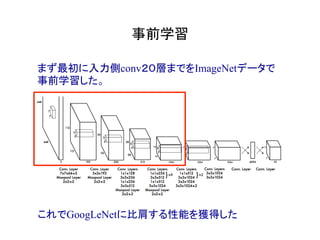
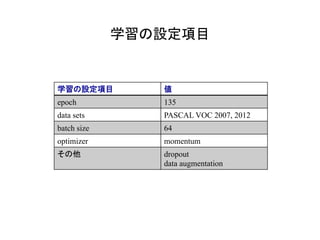
This document introduces YOLO detection model made by J. Redmon, et al. You can easily understand YOLO model if you read this. Only Japanese.
![今回取り上げるのはこれ
[1] J Redmon, et al.”You Only Look Once: Unified, Real-
Time Object Detection”arXiv:1506.02640v5 9 May 2016.
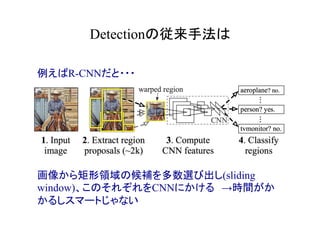
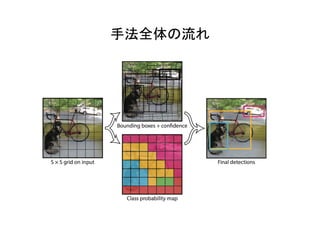
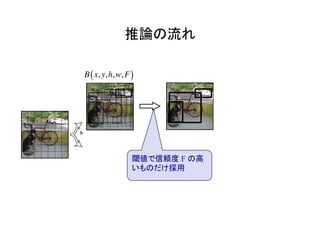
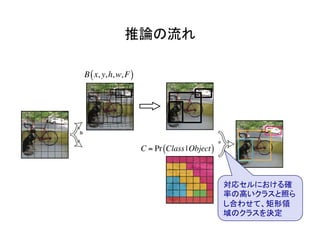
物体検出において、1つのモデルで矩形の候補領域と分類
を同時に行うことで早い速度を達成した!](https://image.slidesharecdn.com/yolodetectionpdf-170105193718/85/Introduction-to-YOLO-detection-model-2-320.jpg)













![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/200515dlseminar-200515082345-thumbnail.jpg?width=640&height=640&fit=bounds)






































![Infinite SVM [改] - ICML 2011 読み会](https://cdn.slidesharecdn.com/ss_thumbnails/isvm-icml11a-110719050617-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)




















