This slideshare introduce to the literature 'Multimodal Deep Learning for Robust RGB-D Object Recognition'. You can easily understand it.
![今回取り上げるのはこれ
[1]A. Eitel, et al.”Multimodal Deep Learning for Robust
RGB-D Object Recognition”, arXiv:1057.06821v2, 2015
CNNを使った教師あり手法でRGB-Dデータから物体認識
を行った!](https://image.slidesharecdn.com/mdlforrgbd-160729193505/75/introduce-to-Multimodal-Deep-Learning-for-Robust-RGB-D-Object-Recognition-2-2048.jpg)
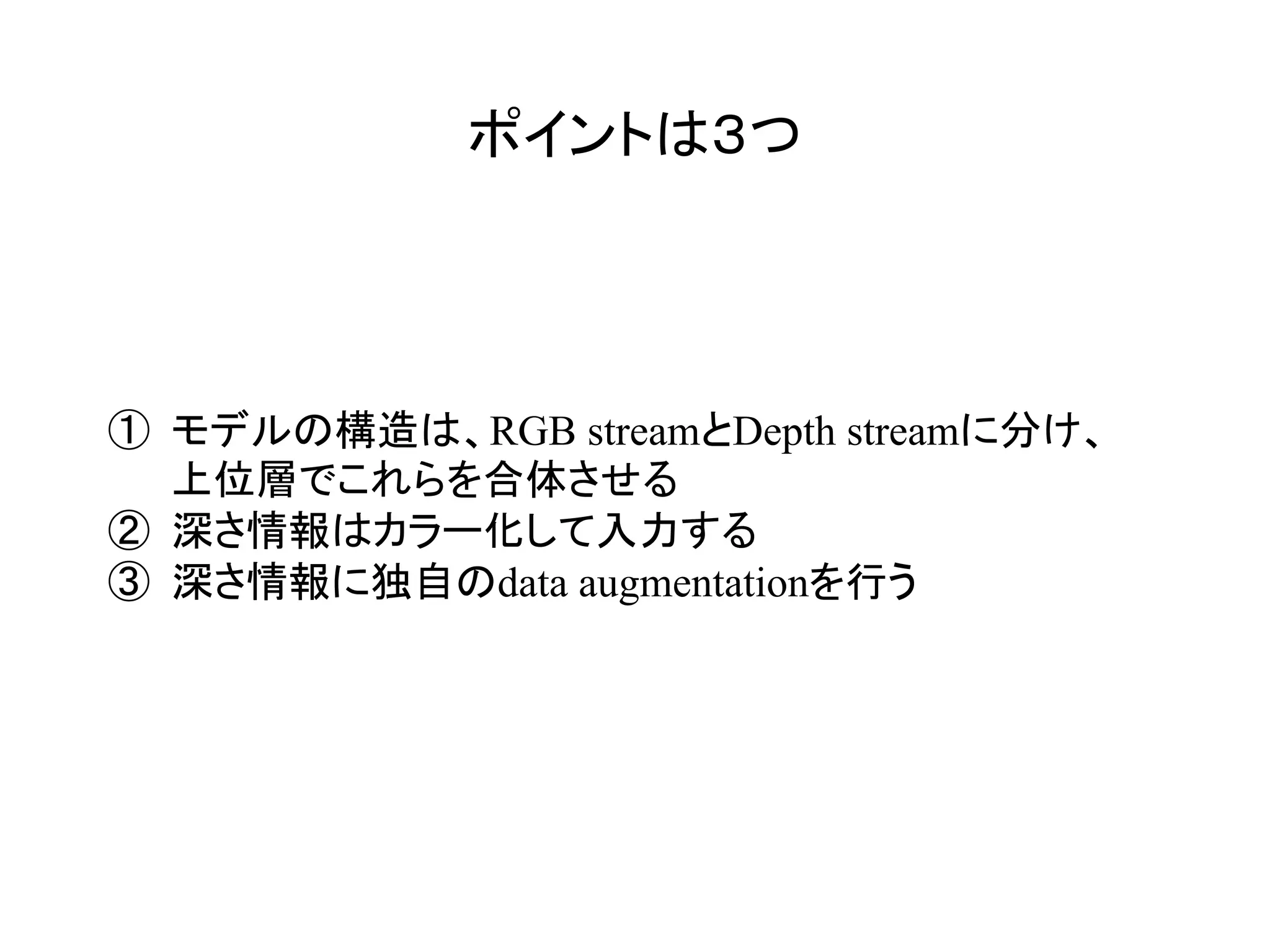
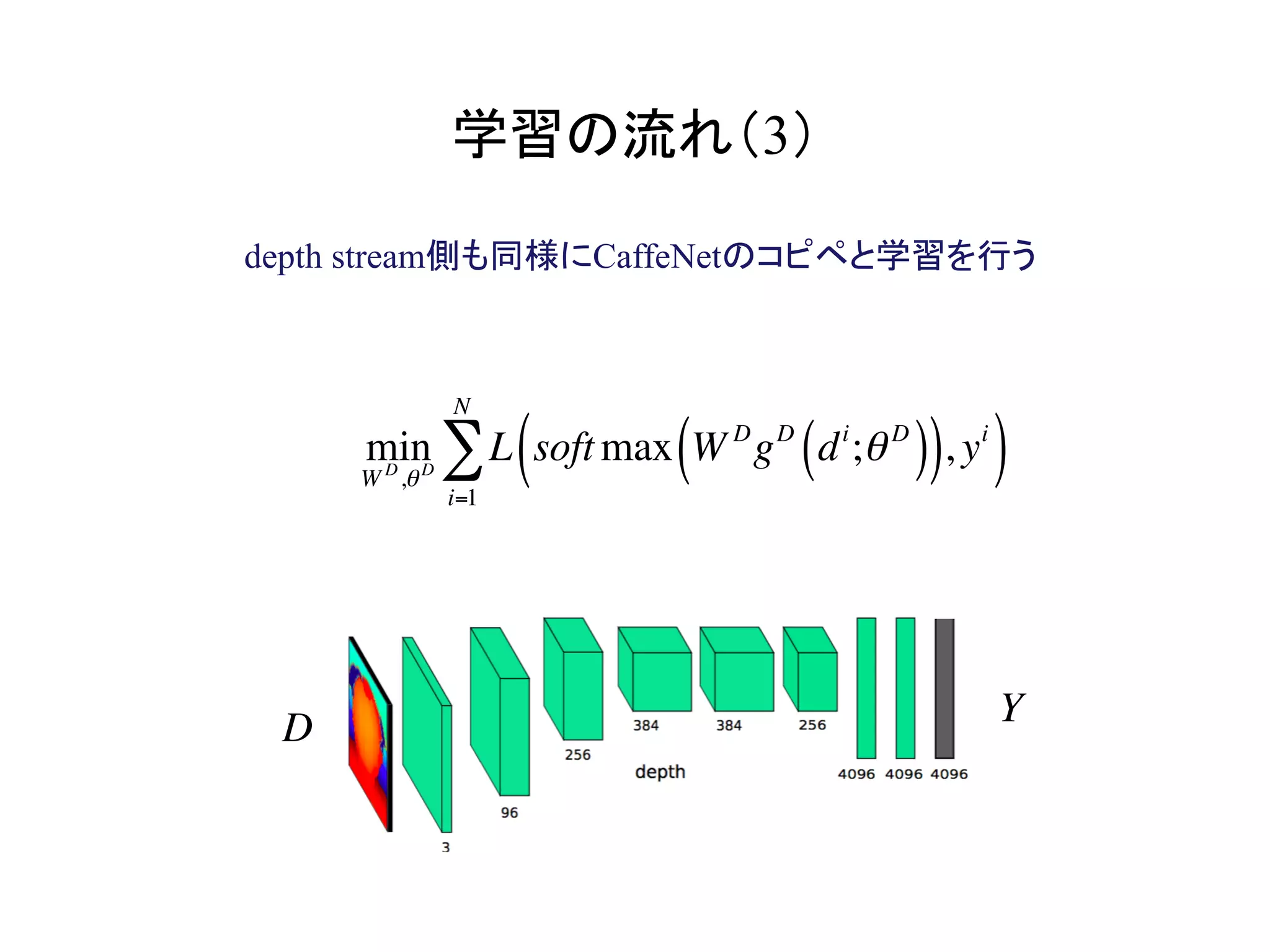
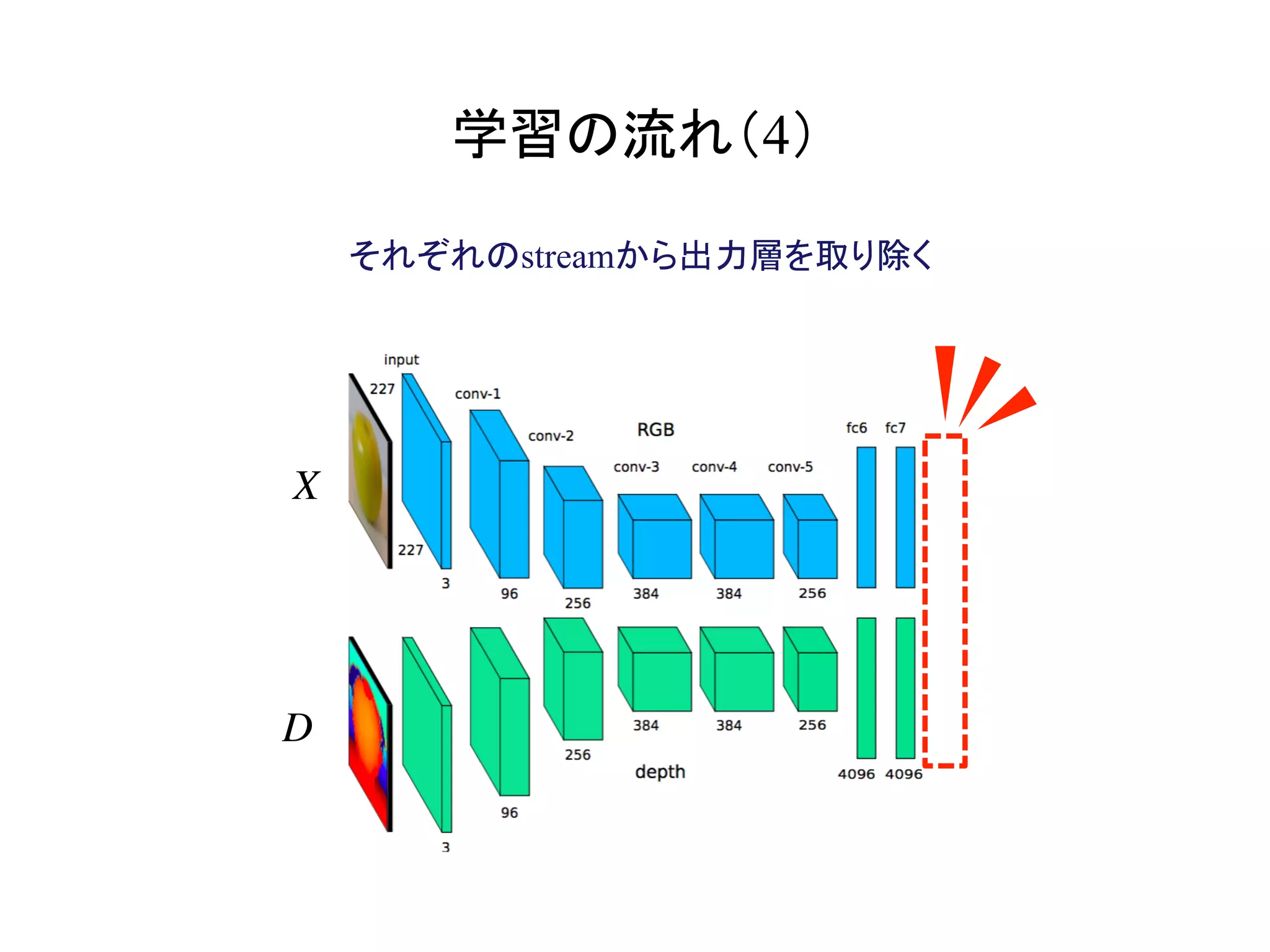
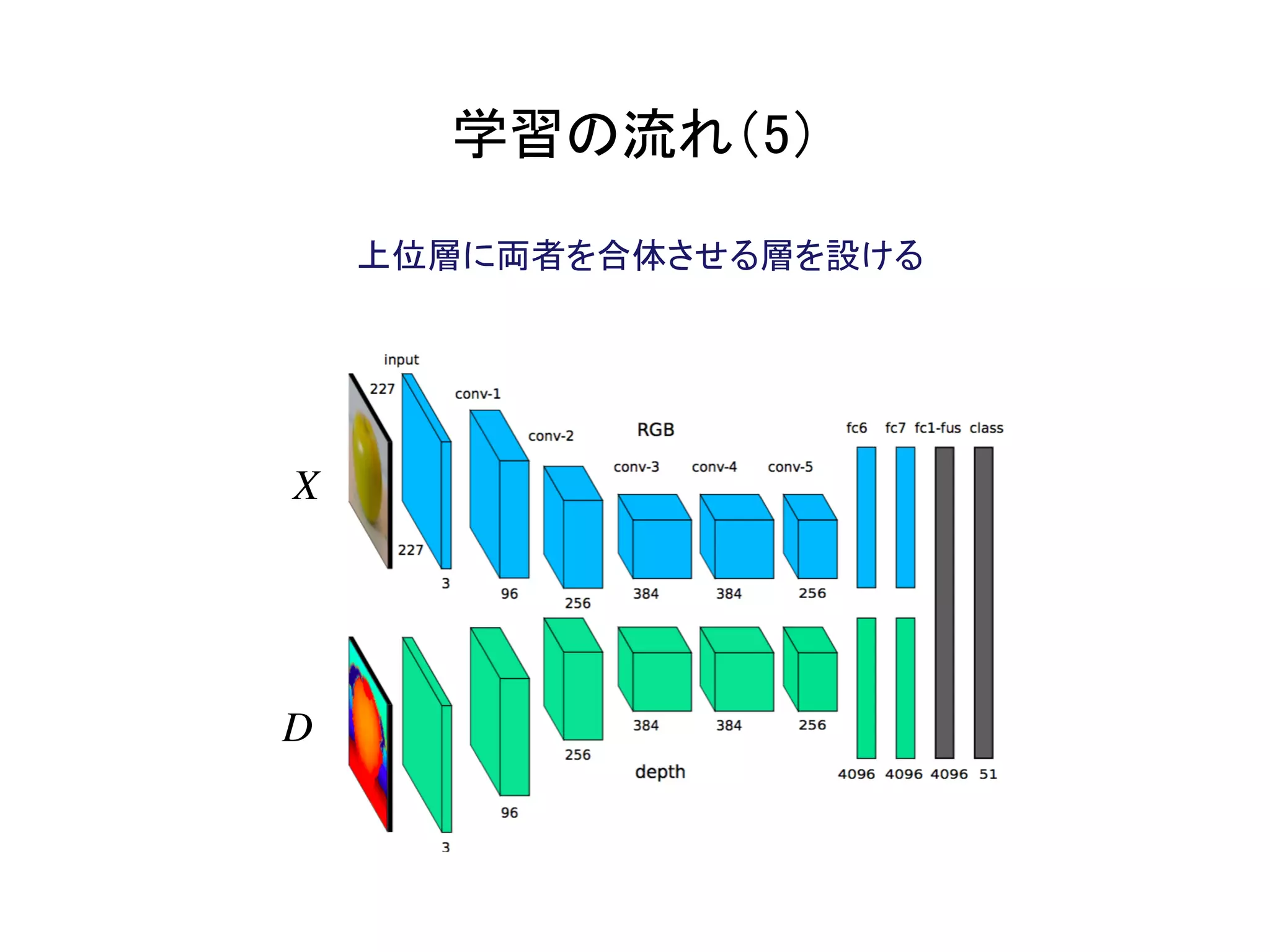
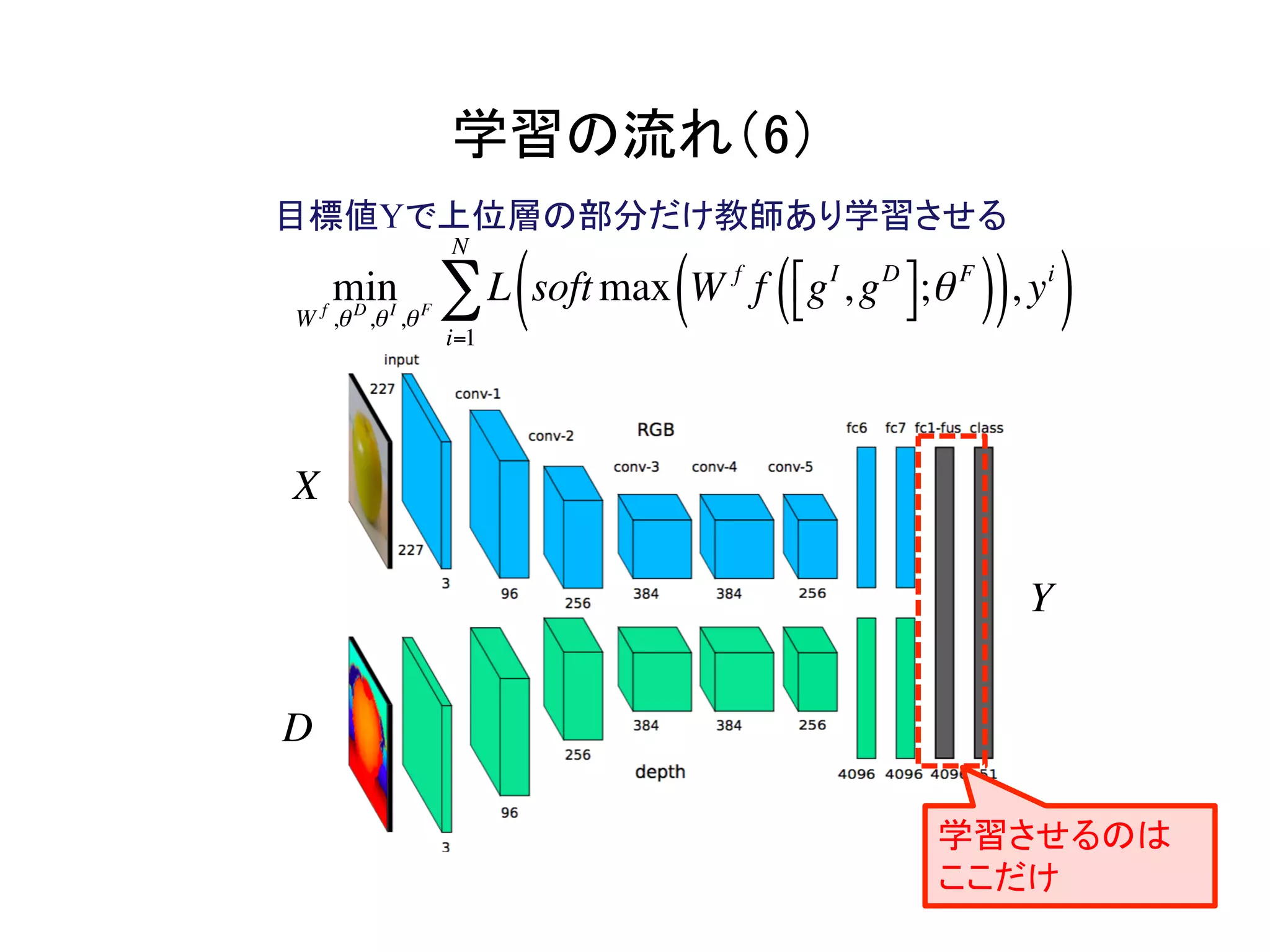
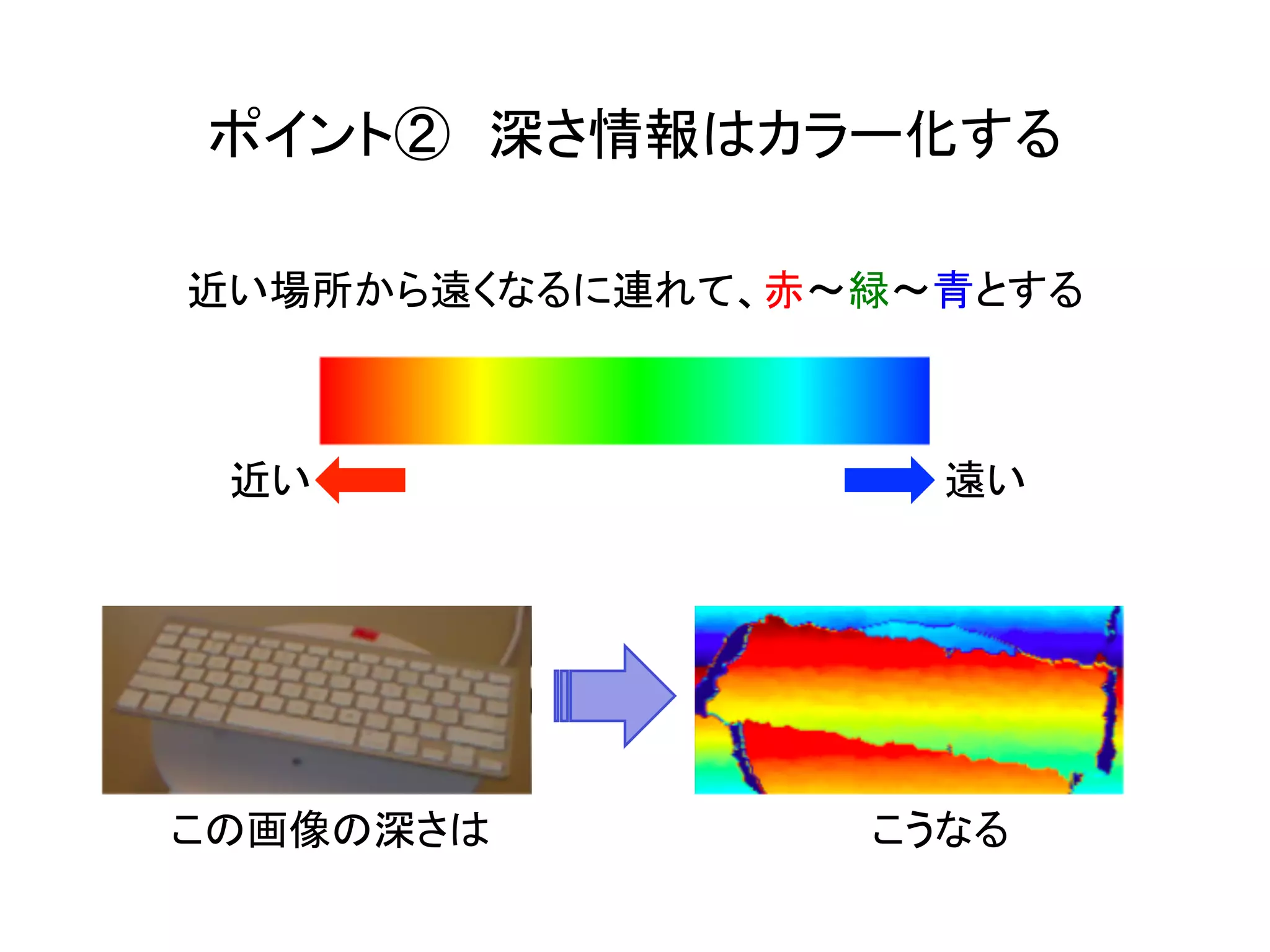
![ポイント① モデルの構造
色情報を畳み込むRGB streamと深さ情報を畳み込むdepth streamが
あり、上位層で合体する
RGB stream
[1]のFigure 1よりdepth stream](https://image.slidesharecdn.com/mdlforrgbd-160729193505/75/introduce-to-Multimodal-Deep-Learning-for-Robust-RGB-D-Object-Recognition-4-2048.jpg)


![[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...](https://cdn.slidesharecdn.com/ss_thumbnails/181214dlpointnet-181214053349-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]Learning Task Informed Abstractions](https://cdn.slidesharecdn.com/ss_thumbnails/20210709akuzawa-210709021836-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks](https://cdn.slidesharecdn.com/ss_thumbnails/yokota20190621dlhack-190621022108-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination](https://cdn.slidesharecdn.com/ss_thumbnails/20200313furutav2-200313025657-thumbnail.jpg?width=640&height=640&fit=bounds)




















![[DL輪読会]Stereo Magnification: Learning view synthesis using multiplane images, +α](https://cdn.slidesharecdn.com/ss_thumbnails/stereomagnification-201002033144-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...](https://cdn.slidesharecdn.com/ss_thumbnails/struct2depth0301-190304050917-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]Unsupervised Learning of 3D Structure from Images](https://cdn.slidesharecdn.com/ss_thumbnails/sugihara-161213071700-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Deep Face Recognition: A Survey](https://cdn.slidesharecdn.com/ss_thumbnails/20181221-181221023935-thumbnail.jpg?width=640&height=640&fit=bounds)






















