This document discusses the z-transform, which is a mathematical tool used to analyze discrete-time control systems. The z-transform plays a similar role for discrete systems as the Laplace transform does for continuous systems. The document covers the definition of the z-transform, its region of convergence in the z-plane, methods for taking the inverse z-transform, properties of the z-transform, and how to use MATLAB for z-transforms.
![Z-Transform
Bilateral Forward z-transform
Bilateral Inverse z-transform
n
n
znhzH )(
R
n
dzzzH
j
nh 1
)(
2
1
][
](https://image.slidesharecdn.com/z-trasnforminmatlab-190712084321/85/Z-trasnform-Inverse-Z-transform-in-matlab-9-320.jpg)
![Convergence
Region of Z-
transform
Region of convergence (ROC)
Since the z-transform can be interpreted as the Fourier
transform of the product of the original sequence x[n]
and the exponential sequence r-n, it is possible for the z-
transform to converge even if the Fourier transform does
not.
Because
X(z) is convergent (i.e. bounded) i.e., Σx[n]r-n <∞, if x[n]
is absolutely summable.
n
n
n
n
znxznxzX](https://image.slidesharecdn.com/z-trasnforminmatlab-190712084321/85/Z-trasnform-Inverse-Z-transform-in-matlab-11-320.jpg)
![Continue..
Eg., x[n] = u[n] is absolutely summable if r>1. This
means that the z-transform for the unit step exists with
ROC |z|>1.
In fact, convergence of the power series X(z) depends
only on |z|.
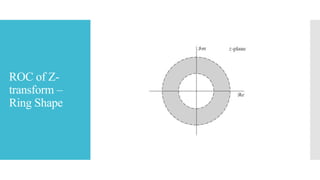
If some value of z, say z = z1, is in the ROC, then all
values of z on the circle defined by |z|=| z1| will also be
in the ROC.
Thus the ROC will consist of a ring in the z-plane.
n
n
znx](https://image.slidesharecdn.com/z-trasnforminmatlab-190712084321/85/Z-trasnform-Inverse-Z-transform-in-matlab-12-320.jpg)
















![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)