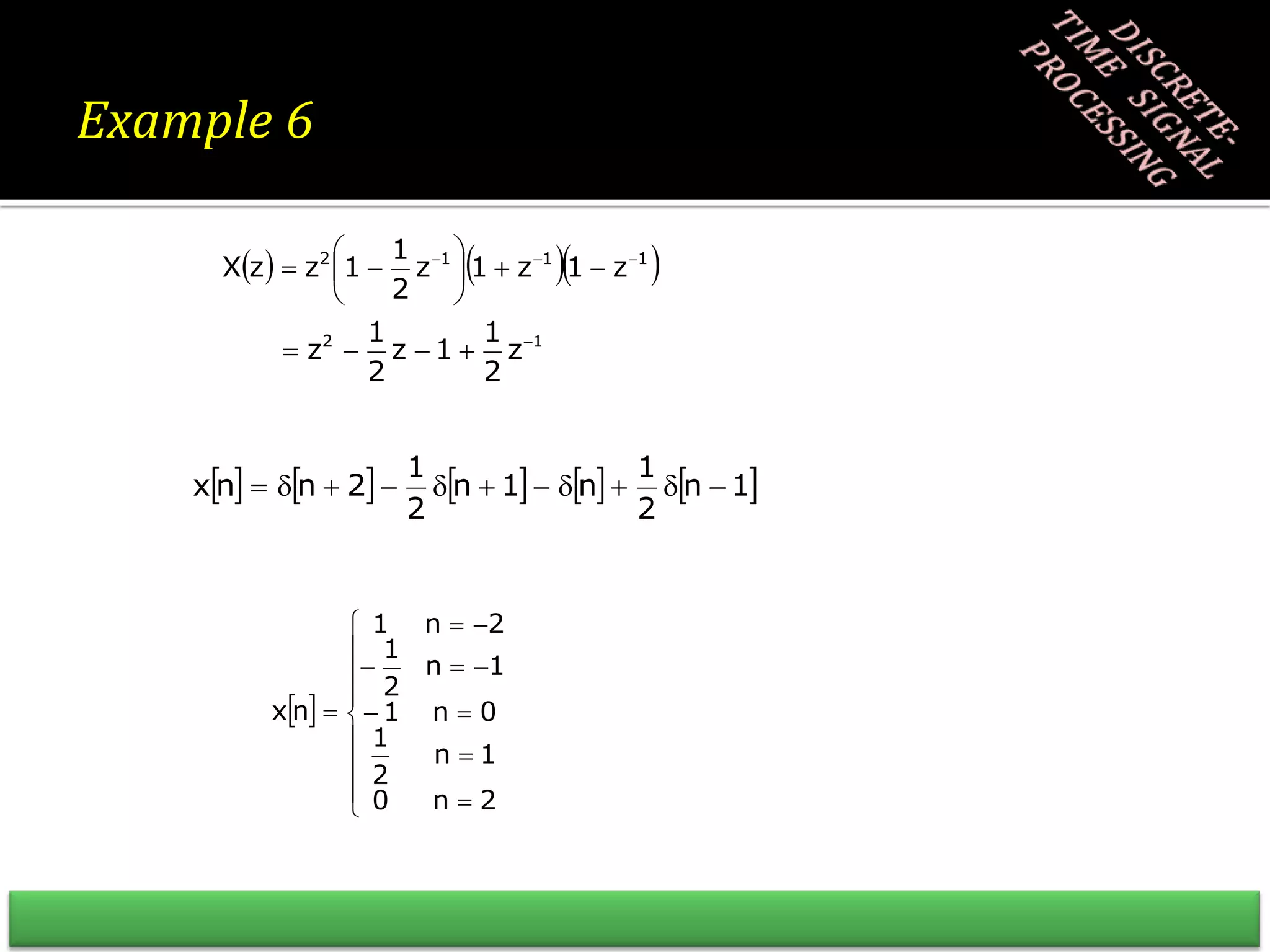
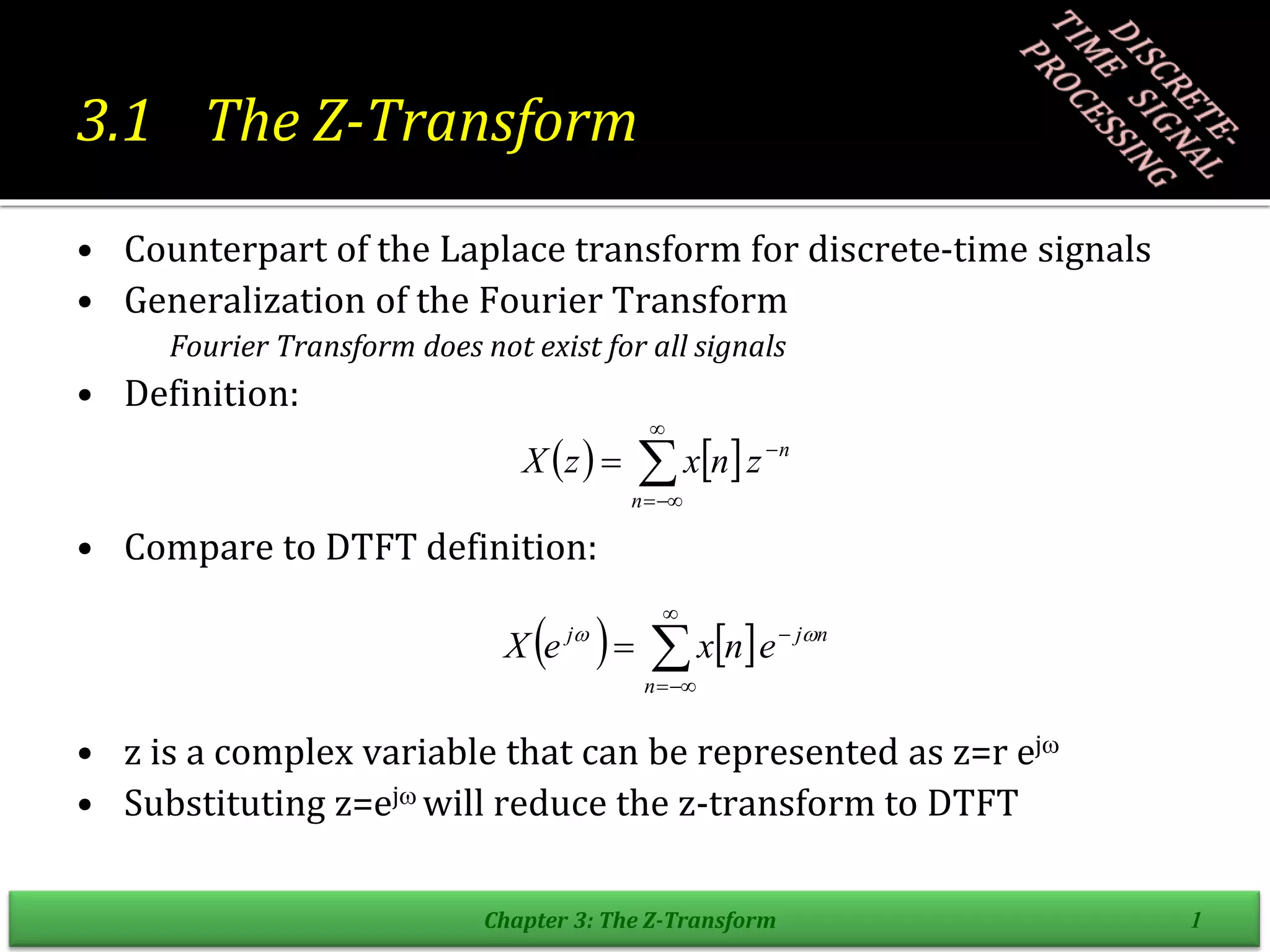
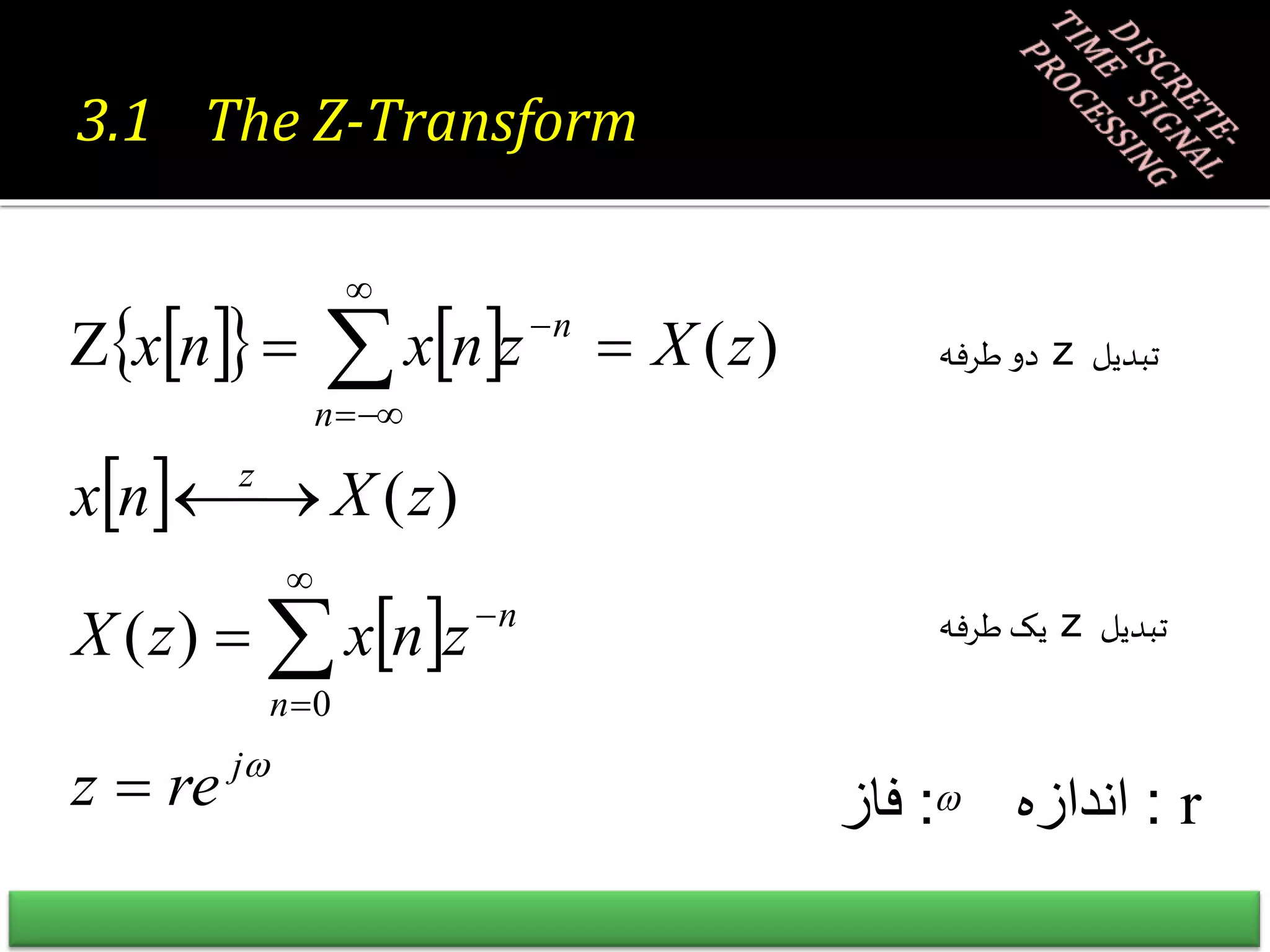
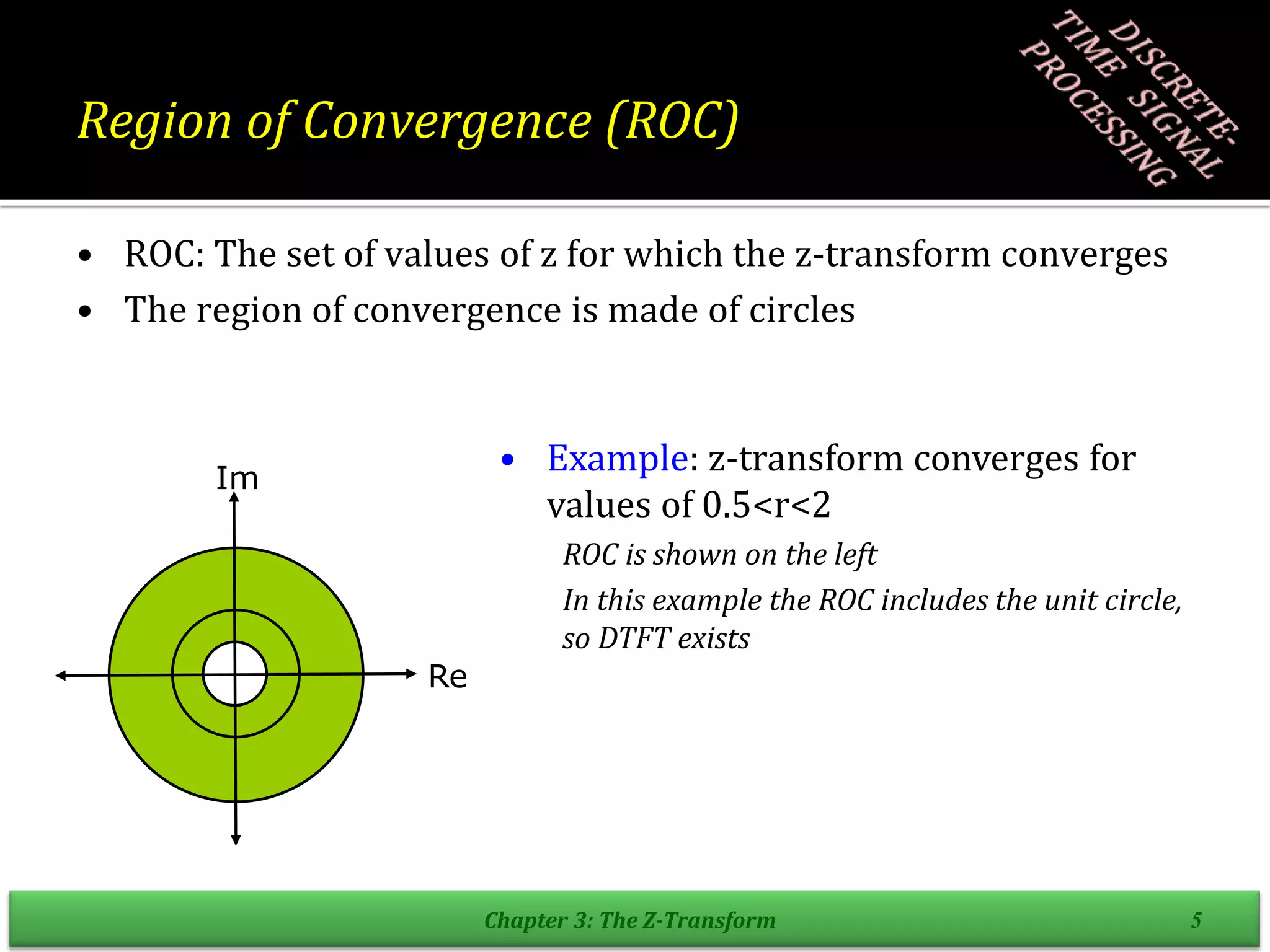
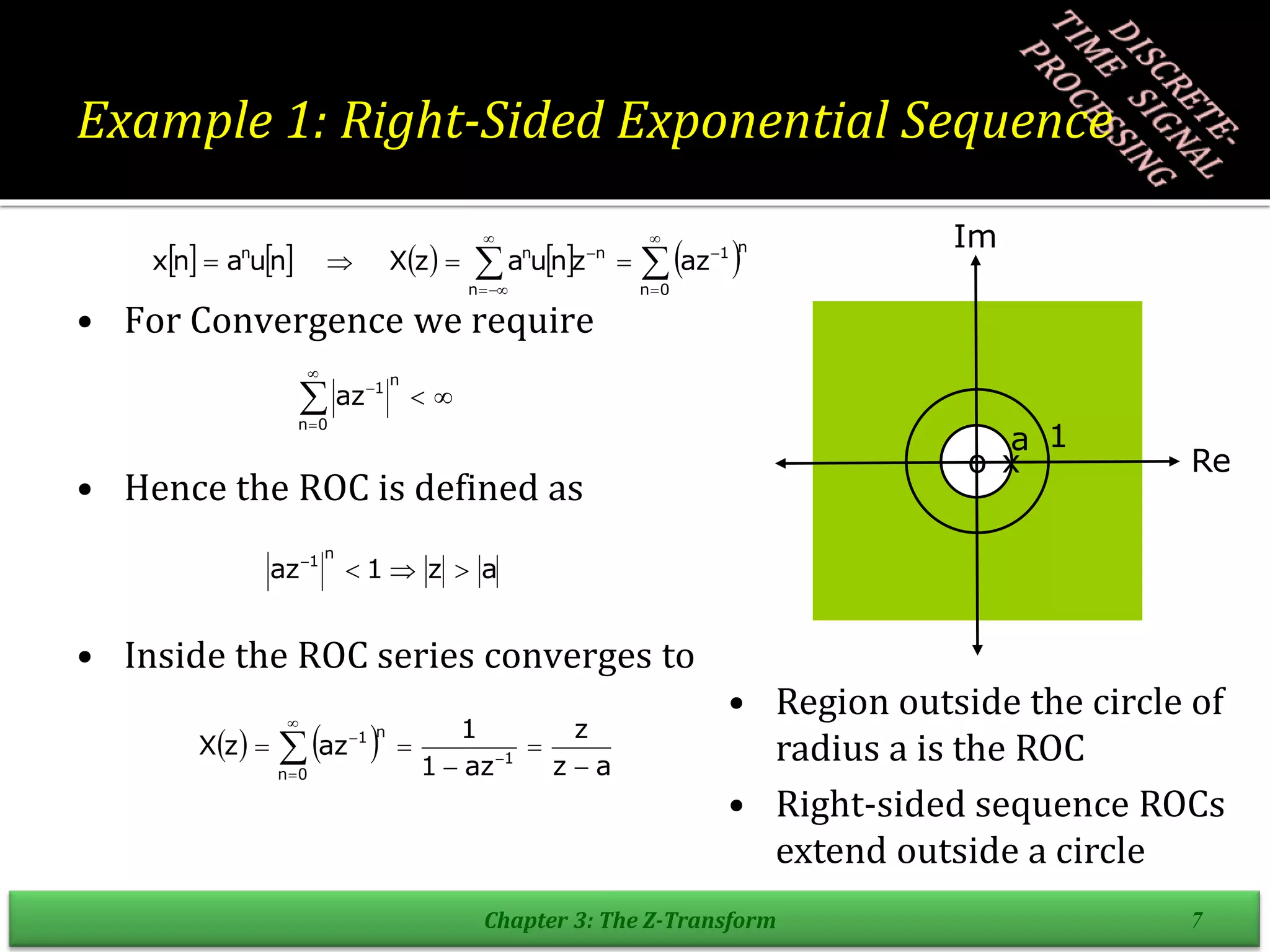
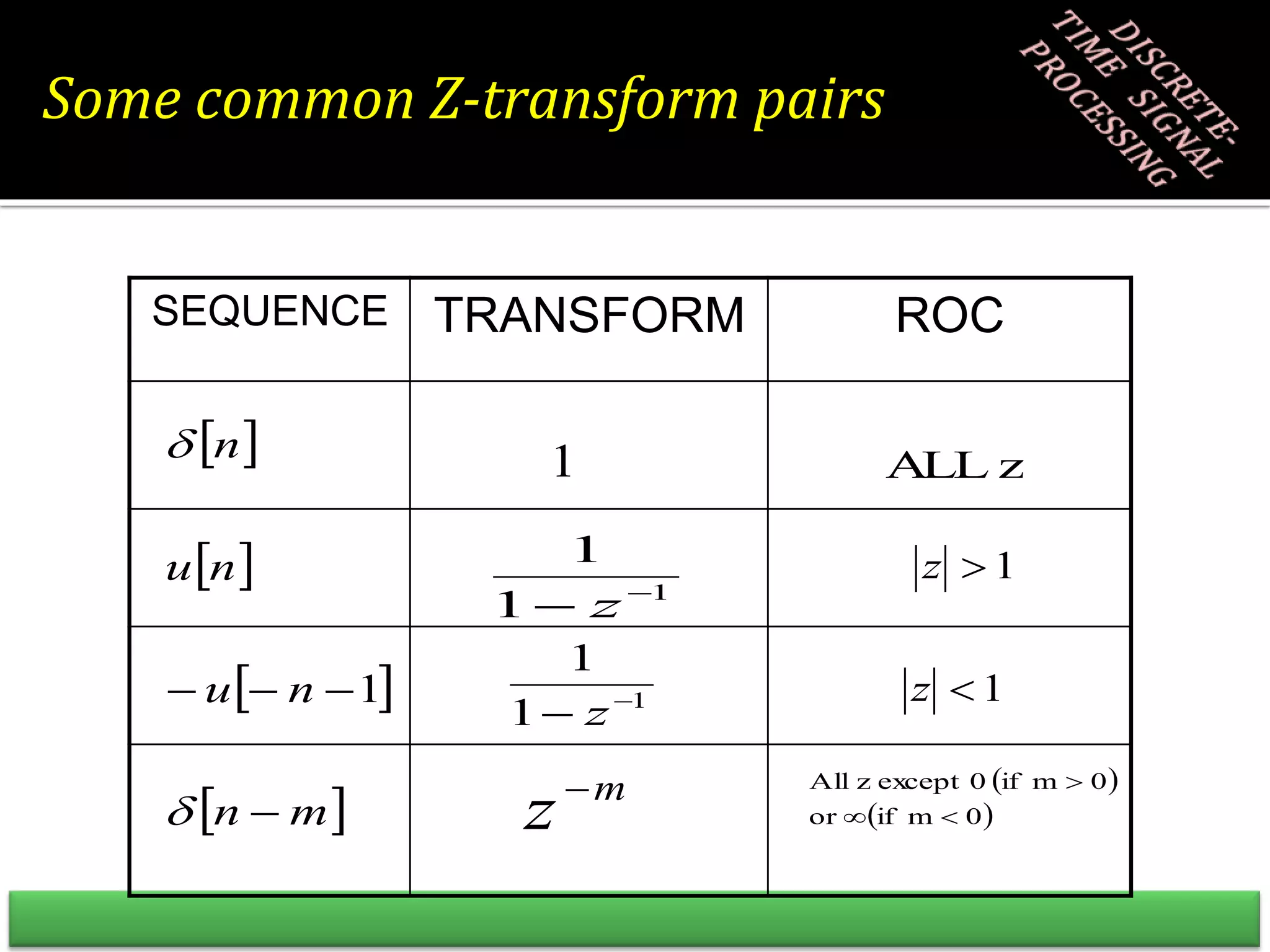
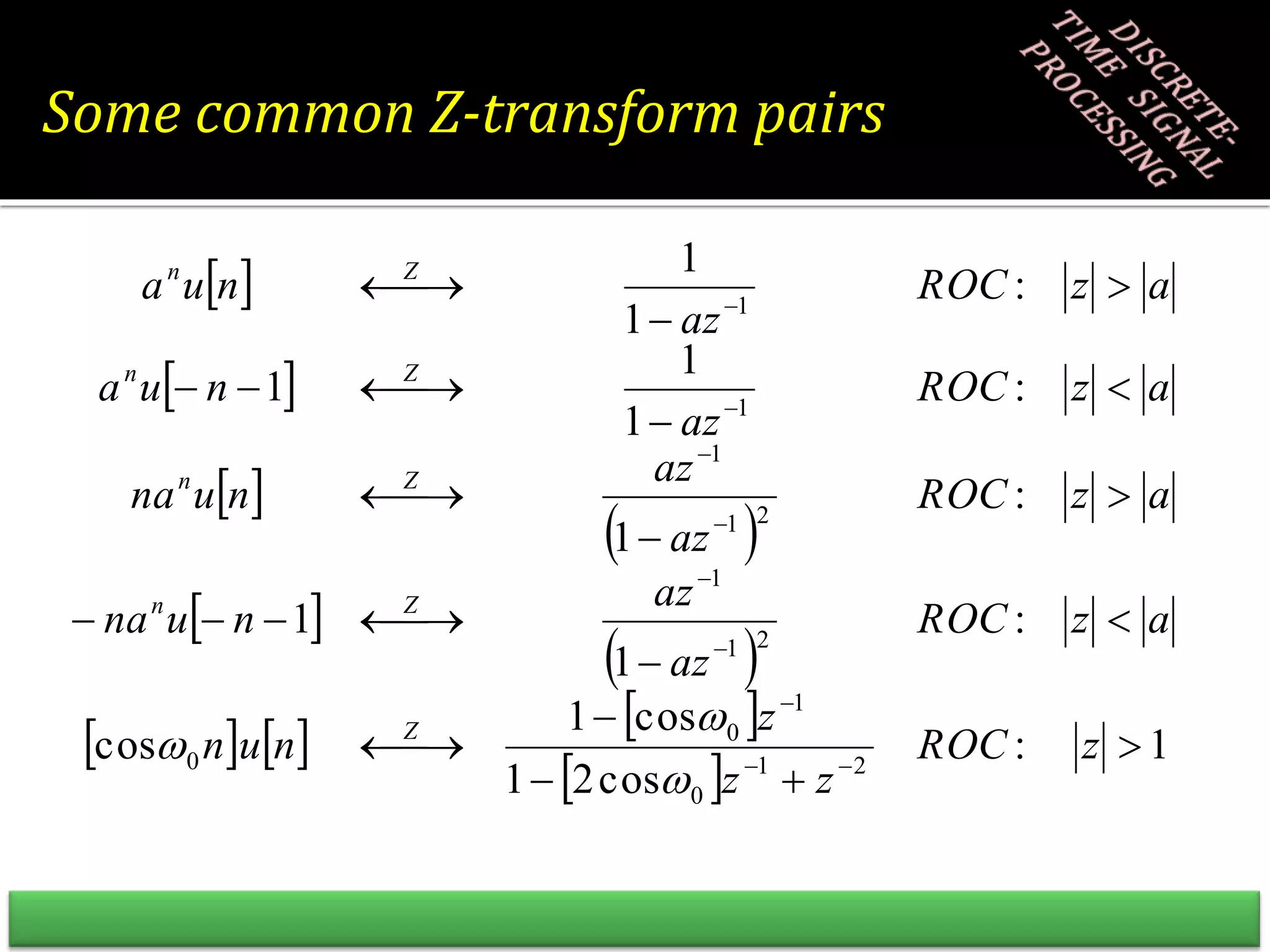
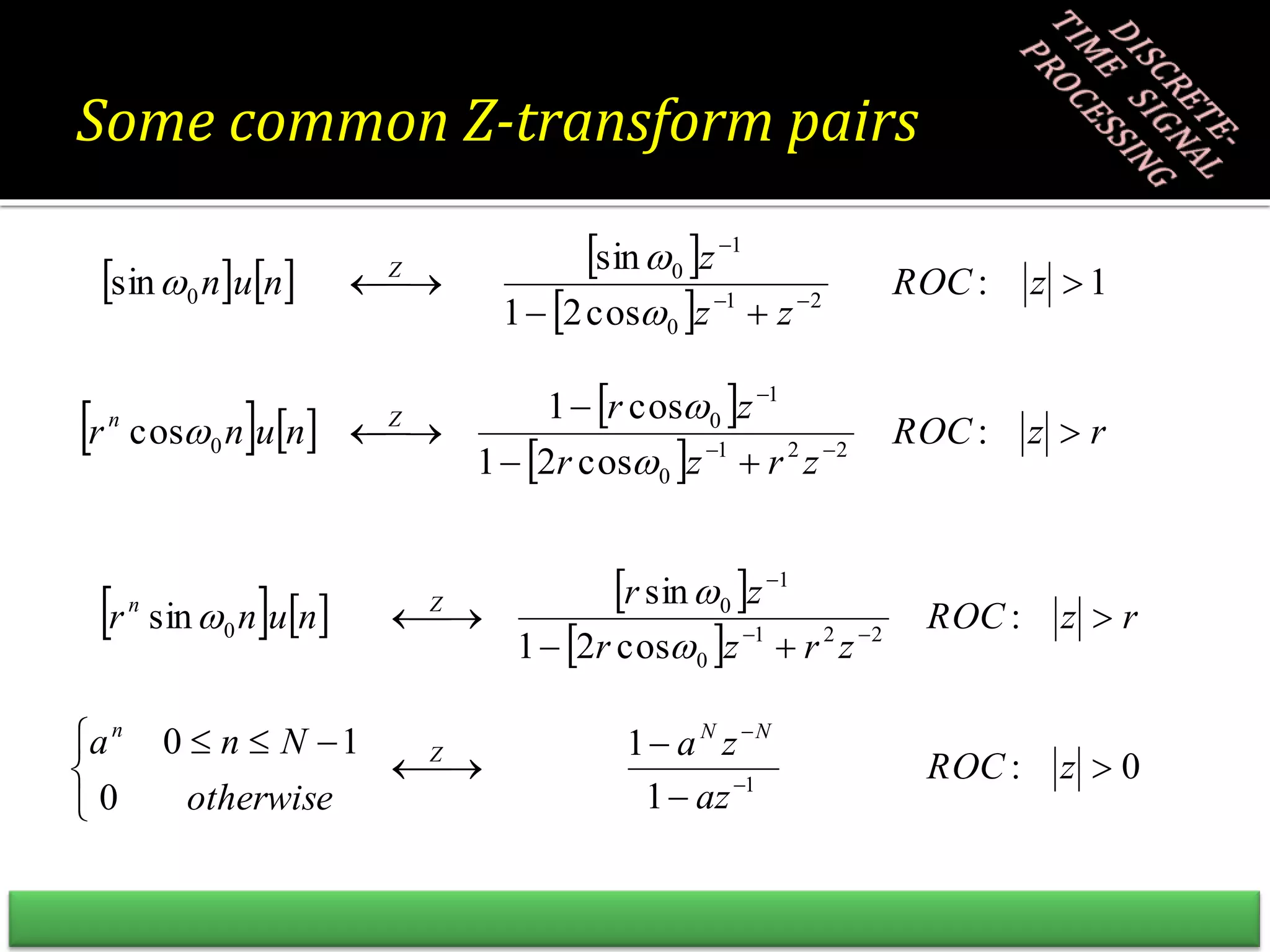
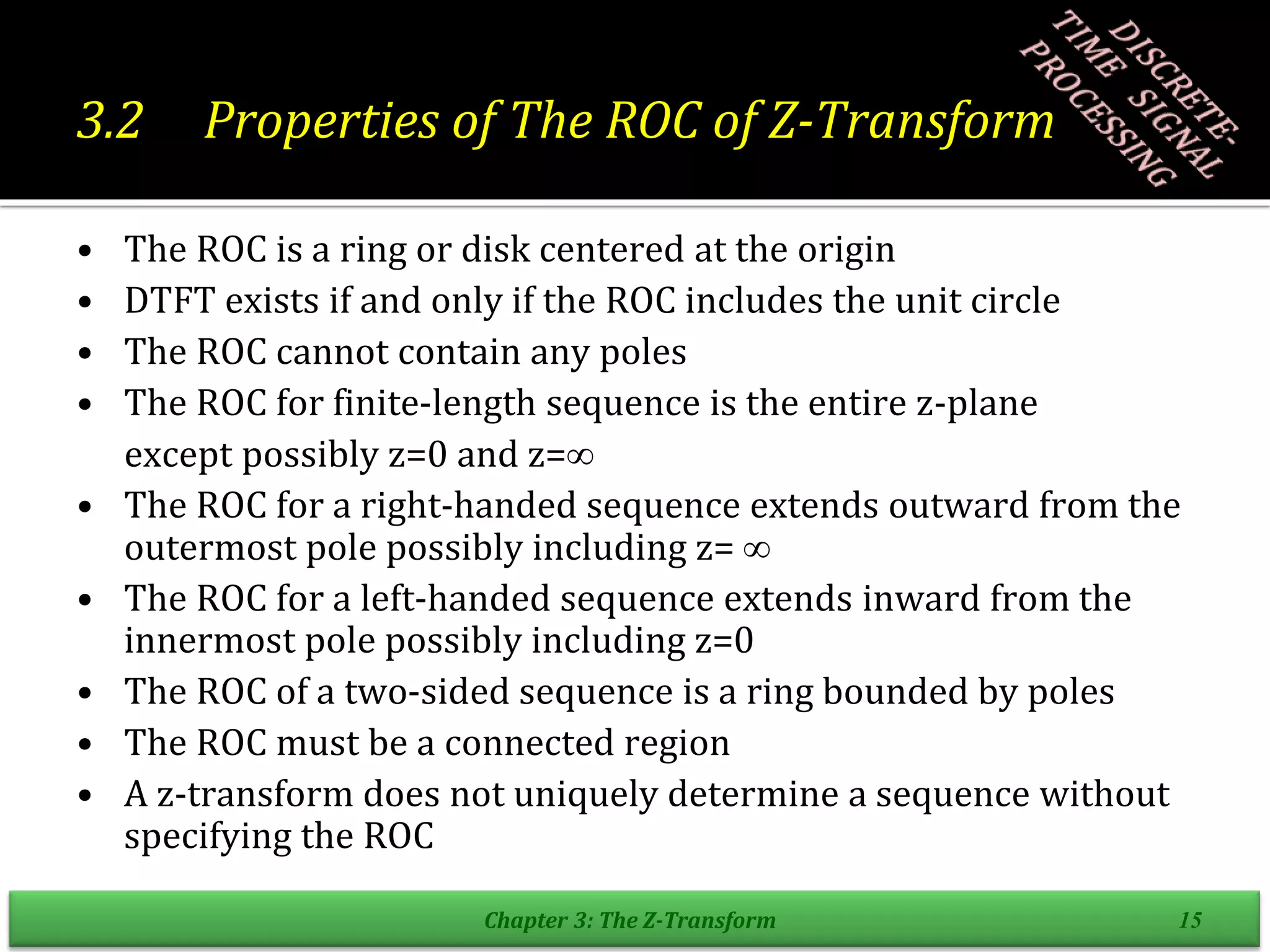
The document summarizes key concepts about the z-transform, which is the discrete-time counterpart of the Laplace transform. It defines the z-transform, compares it to the discrete-time Fourier transform (DTFT), and discusses its region of convergence (ROC). Examples are provided to illustrate ROCs for different types of sequences, including right-sided, left-sided, and two-sided exponential sequences as well as a finite-length sequence. Common z-transform pairs are also listed.
![Convergence of the z-Transform
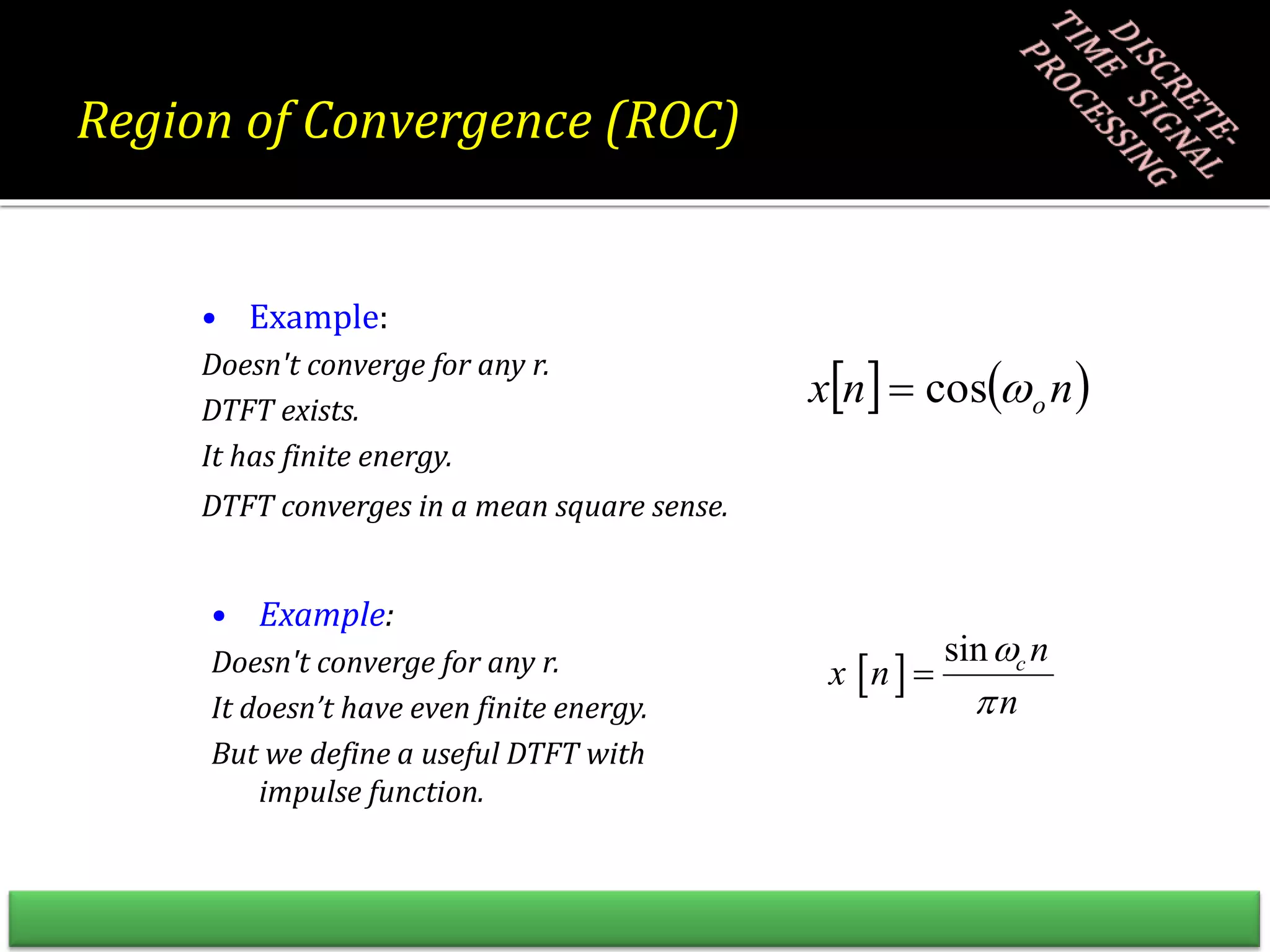
• DTFT does not always converge
Example: x[n] = anu[n] for |a|>1 does not have a DTFT
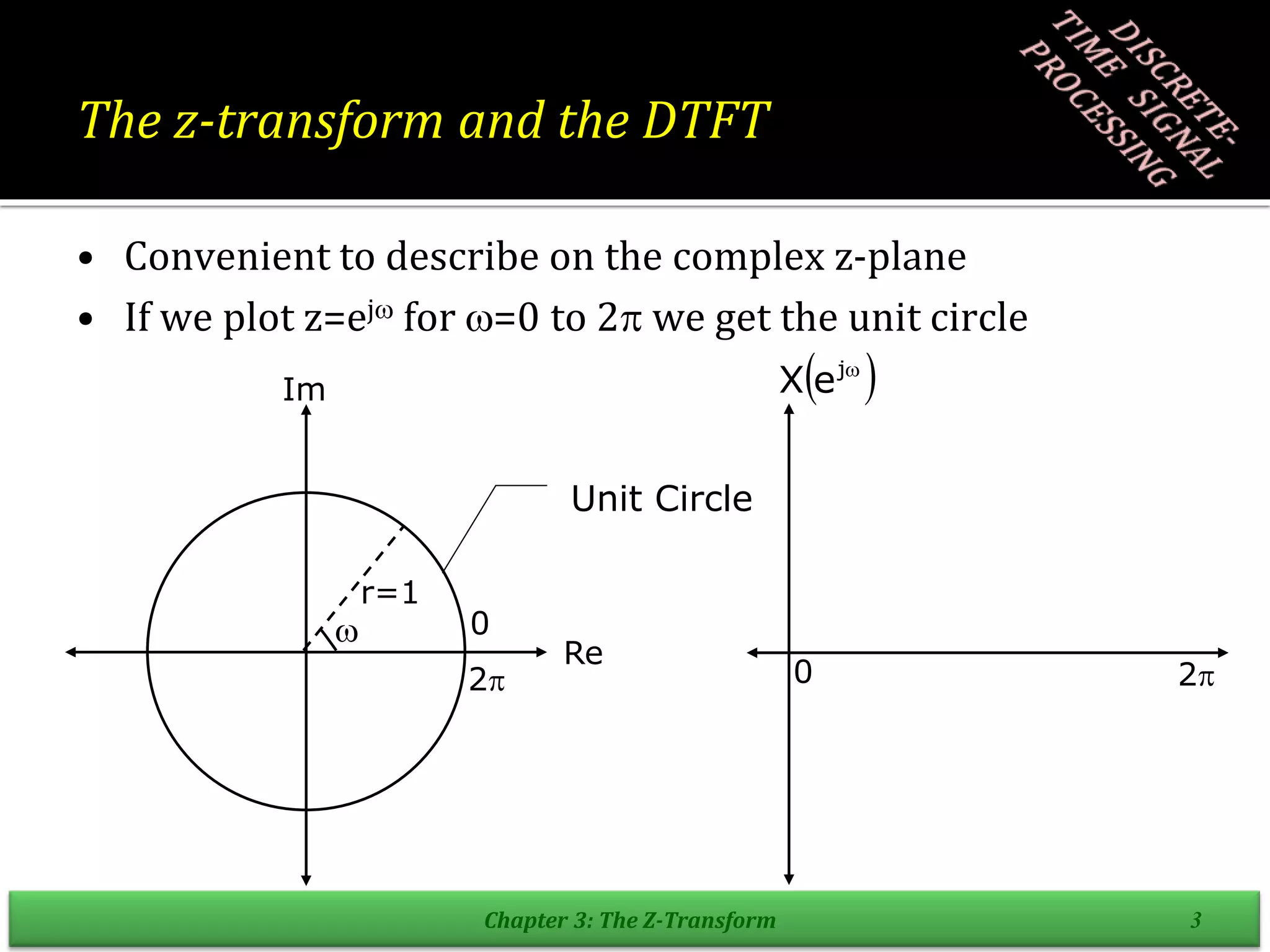
• Complex variable z can be written as r ej so the z-
transform
convert to the DTFT of x[n] multiplied with exponential
sequence r –n
• For certain choices of r the sum
maybe made finite
Chapter 3: The Z-Transform 4
n
n
j
n
n
n
j
j
e
n
x
e
n
x
re
X
r
r
n
j
n
j
e
n
x
e
X
n
n
x r n
-](https://image.slidesharecdn.com/signalsandsystems3ppt-220312164033/75/Signals-and-systems3-ppt-5-2048.jpg)
![Stability, Causality, and the ROC
• Consider a system with impulse response h[n]
• The z-transform H(z) and the pole-zero plot shown below
• Without any other information h[n] is not uniquely determined
|z|>2 or |z|<½ or ½<|z|<2
• If system stable ROC must include unit-circle: ½<|z|<2
• If system is causal must be right sided: |z|>2
Chapter 3: The Z-Transform 16](https://image.slidesharecdn.com/signalsandsystems3ppt-220312164033/75/Signals-and-systems3-ppt-17-2048.jpg)