Downloaded 179 times
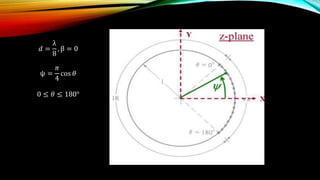

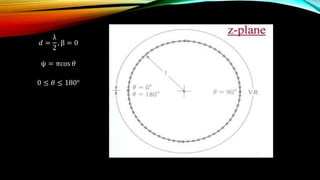

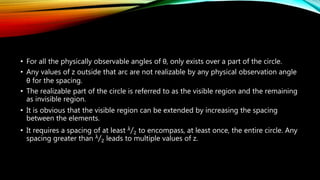
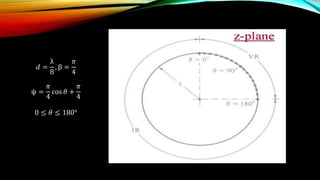
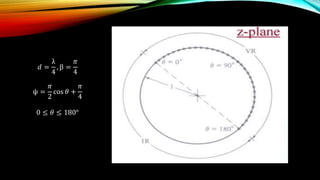
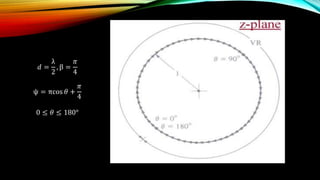
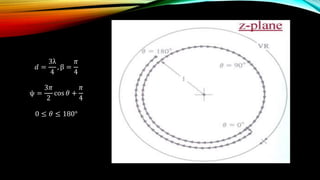
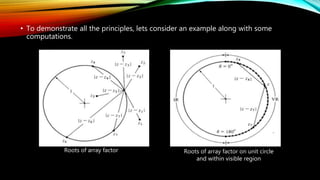
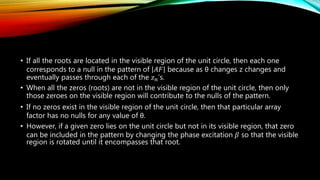

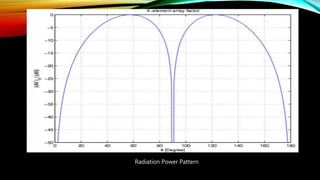
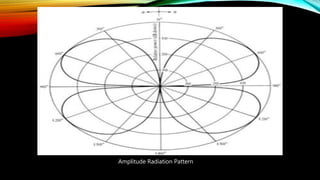

The document discusses the Schelkunoff polynomial method for antenna synthesis. It involves designing an antenna array to produce a desired radiation pattern with nulls in specific directions. The method models the array factor as a polynomial and solves for the roots, which correspond to null locations. Array coefficients are then determined to produce the required roots within the visible region of the unit circle based on the element spacing and progressive phase shifts. As an example, a 4 element linear array is designed with nulls at 0, 90, and 180 degrees.






![3_Antenna Array [Modlue 4] (1).pdf](https://cdn.slidesharecdn.com/ss_thumbnails/3antennaarraymodlue41-220419112111-thumbnail.jpg?width=640&height=640&fit=bounds)



















































![Antenna lecture course CHapter 2_(2)[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/antennach221-240525095938-532f47be-thumbnail.jpg?width=640&height=640&fit=bounds)