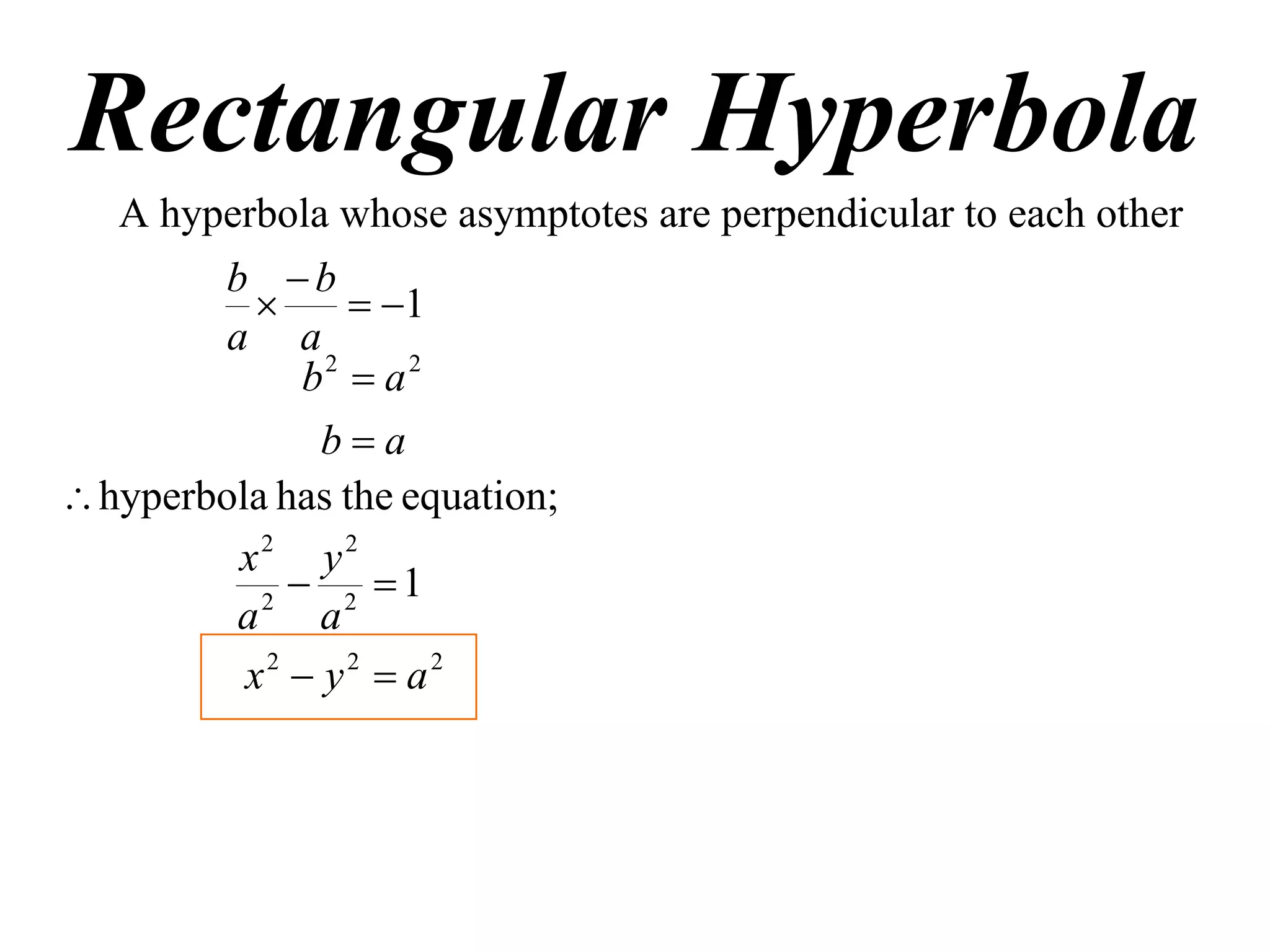
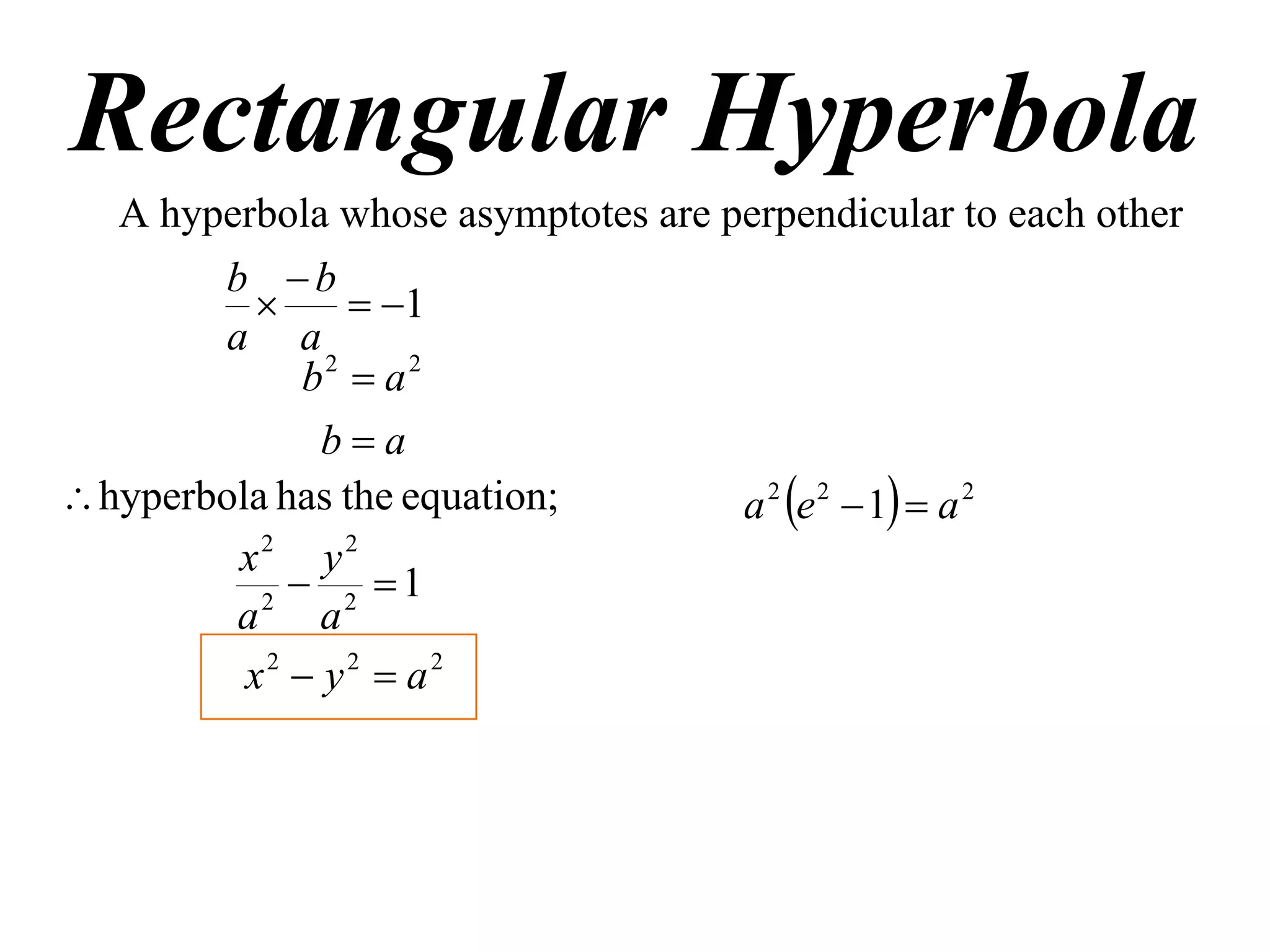
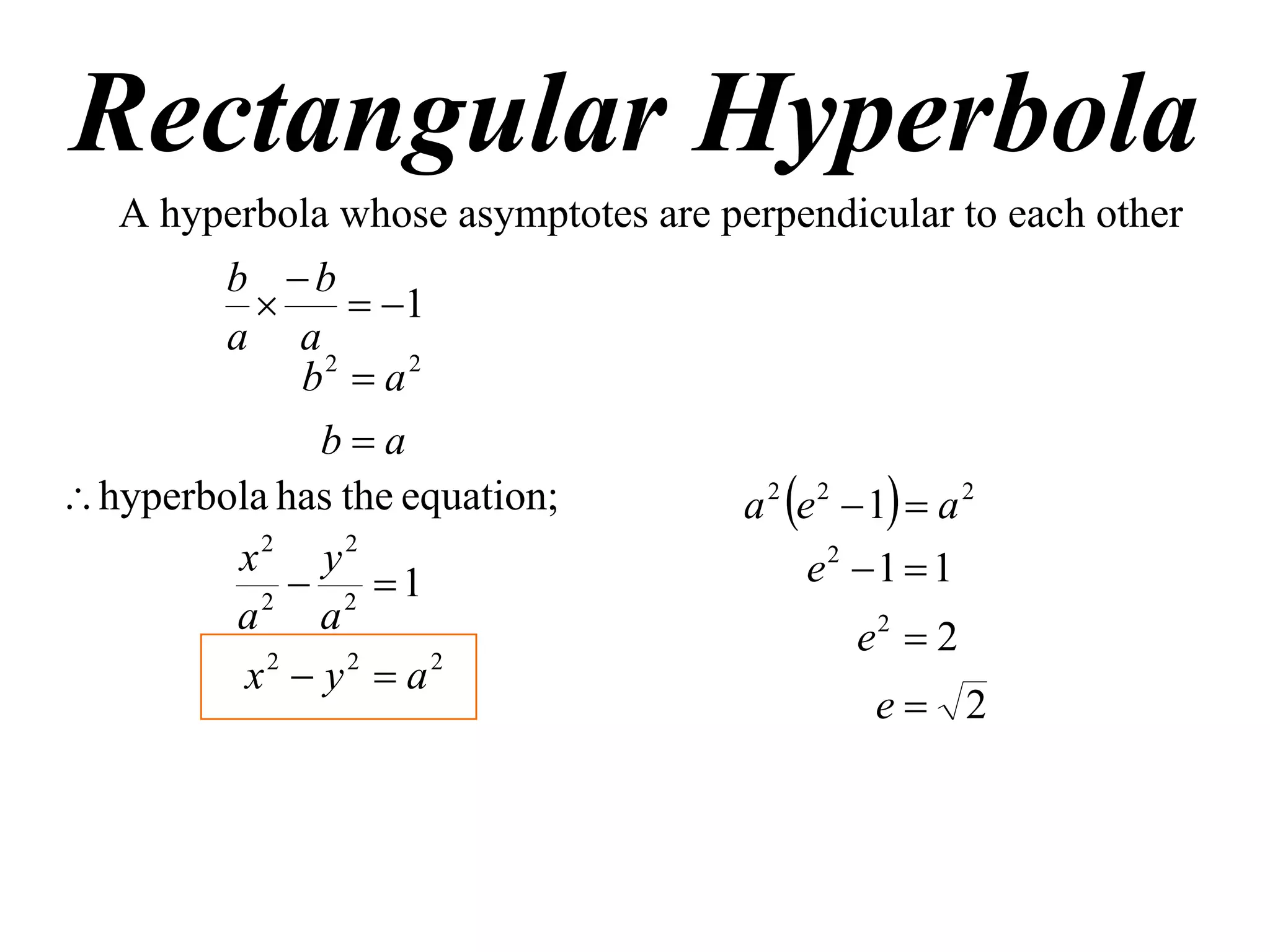
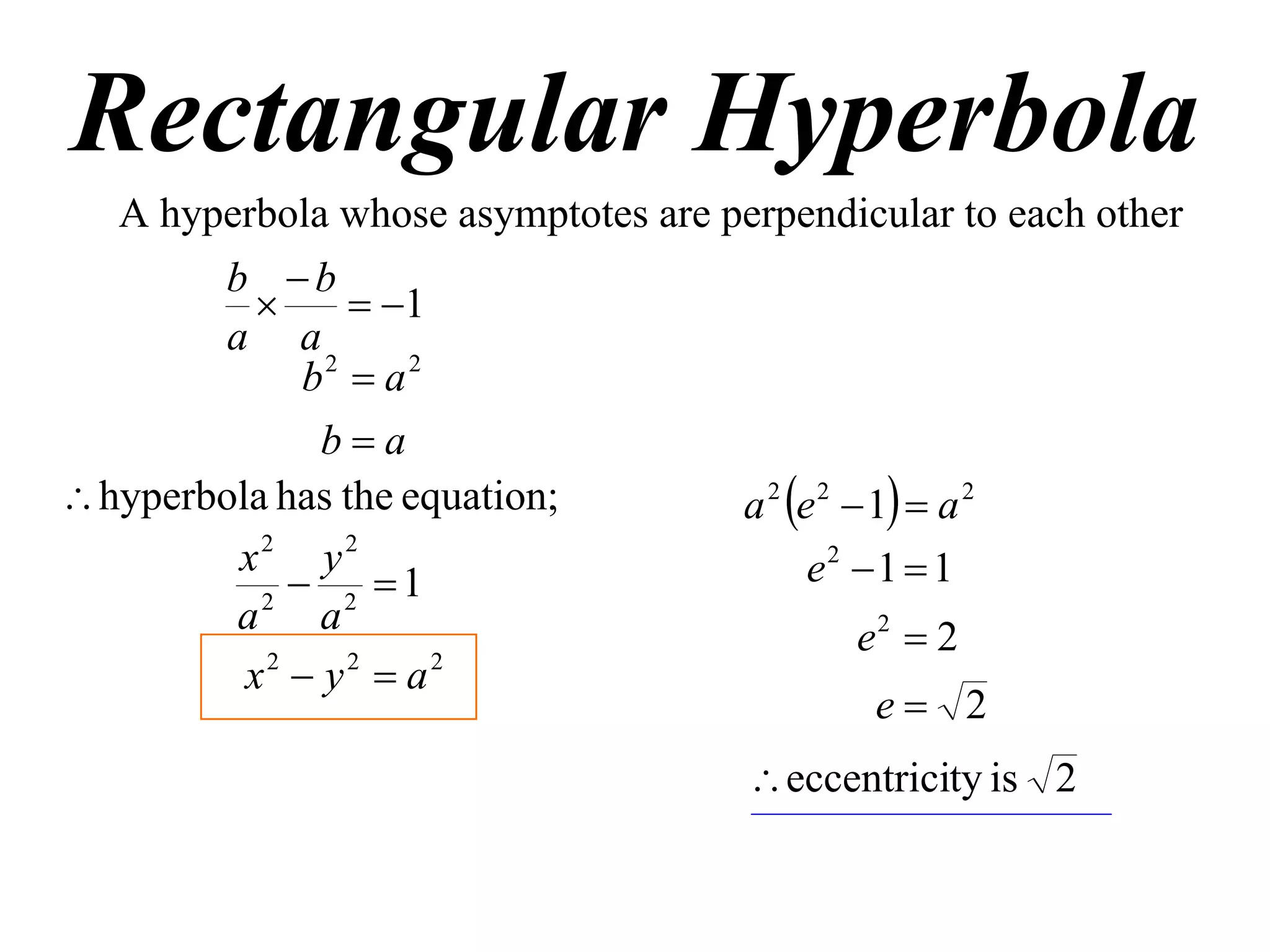
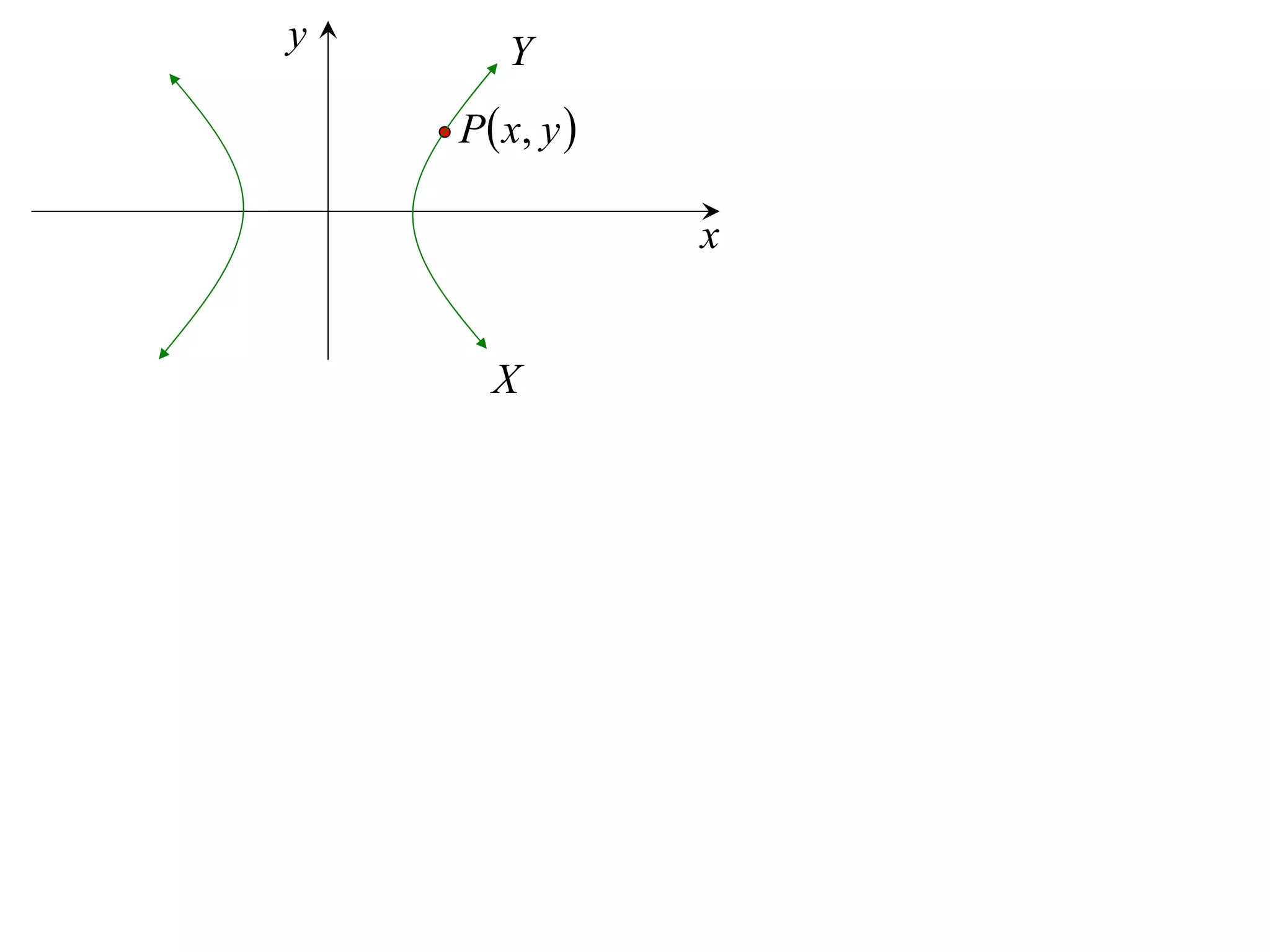
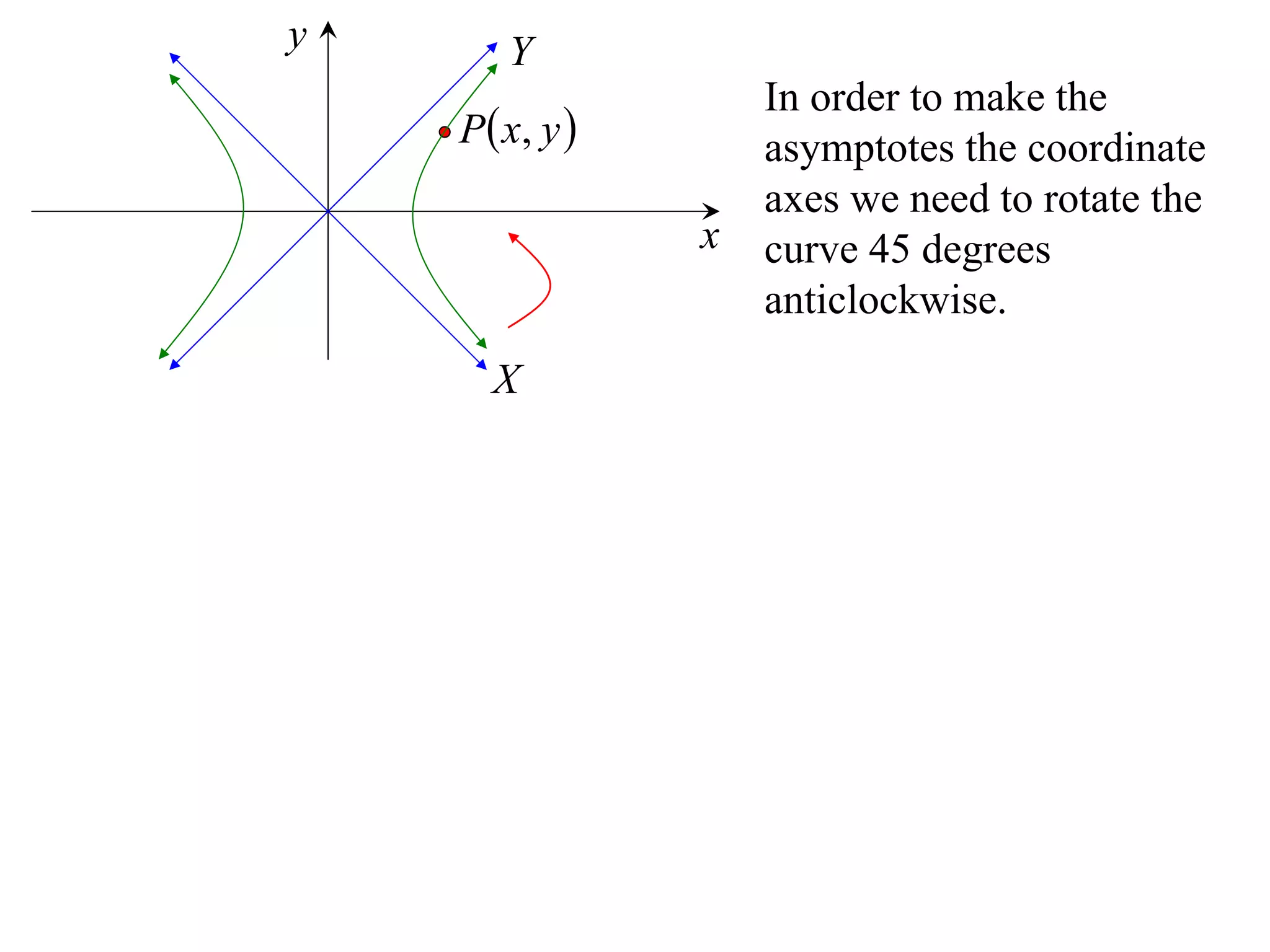
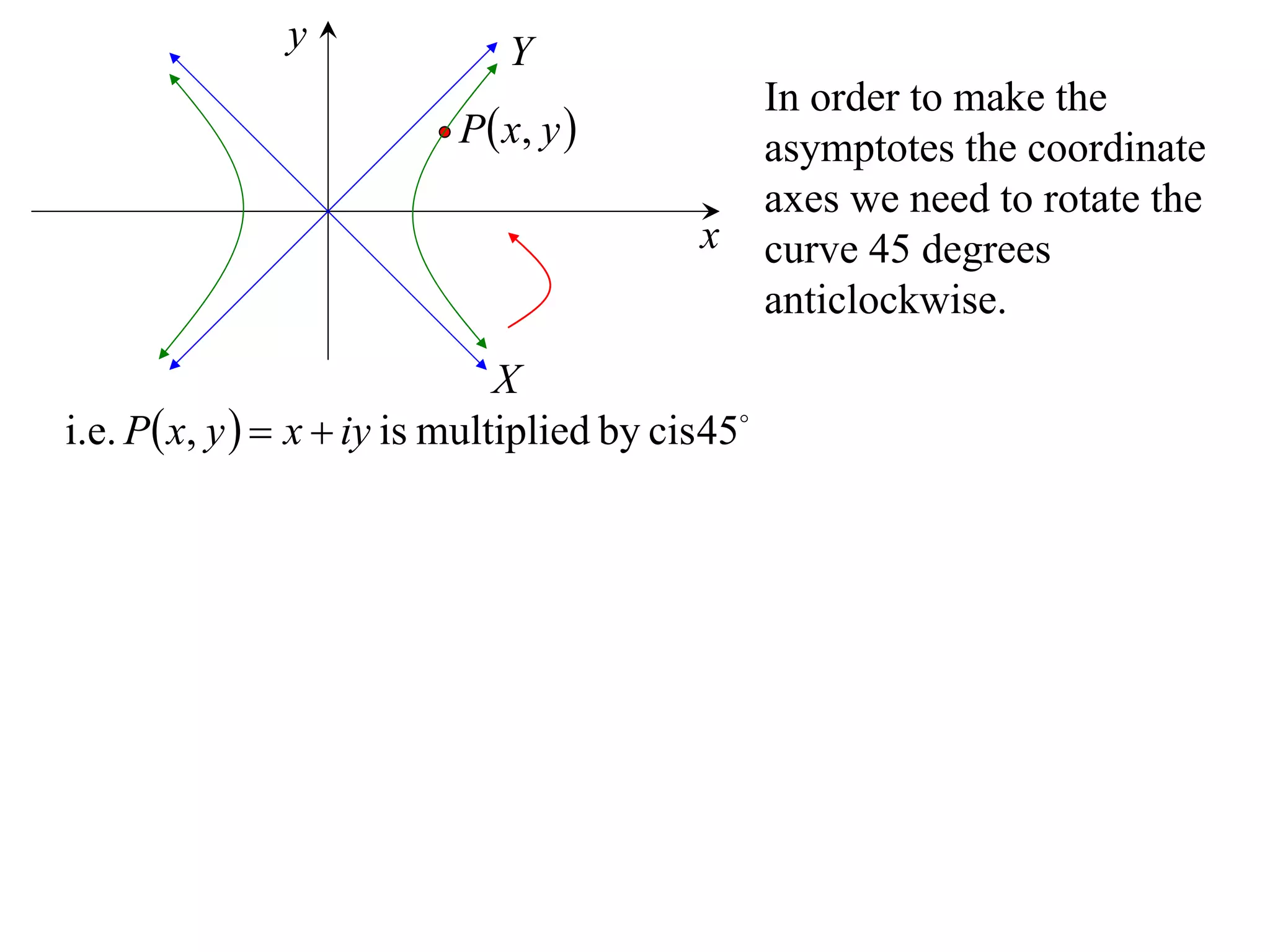
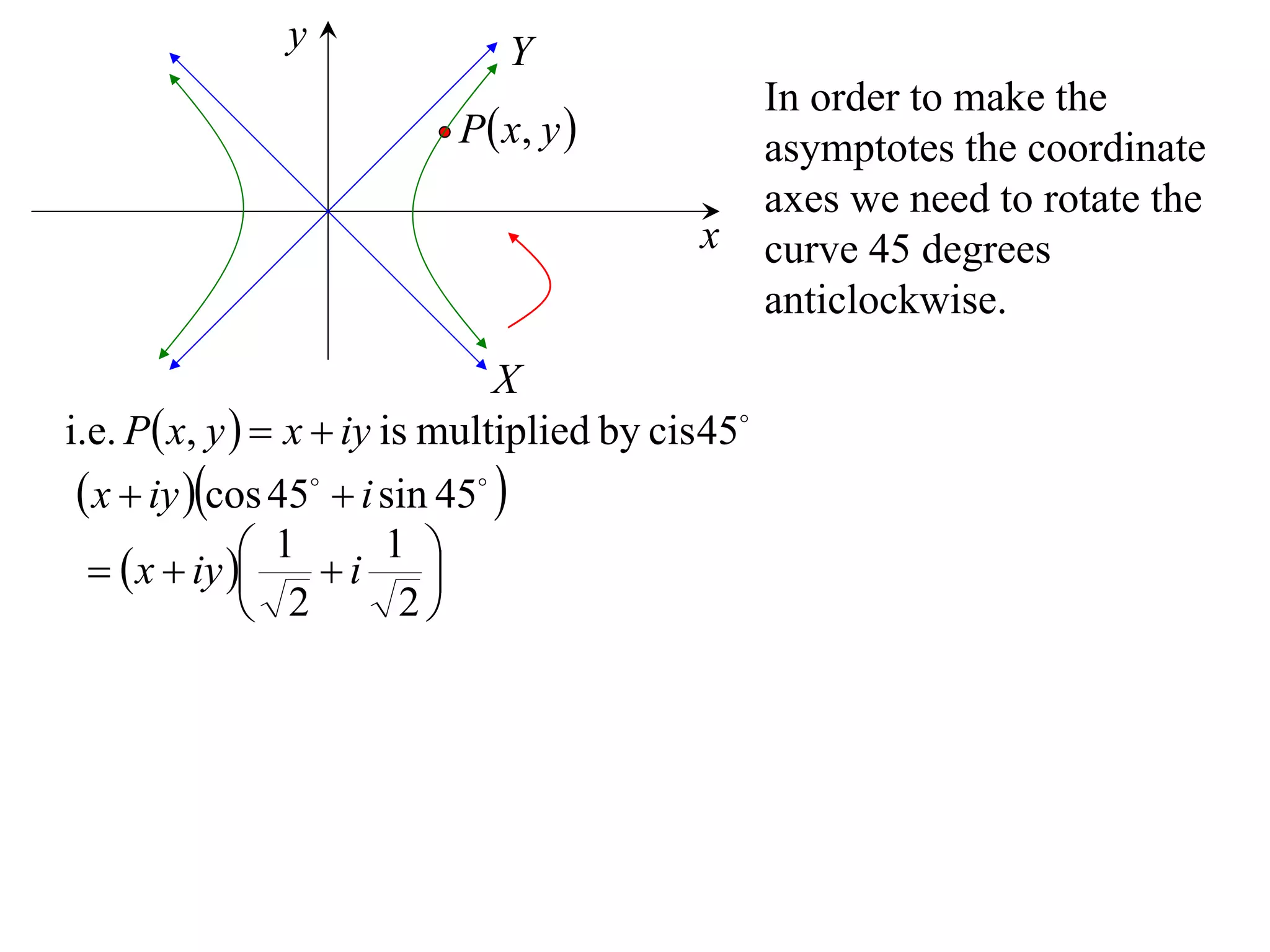
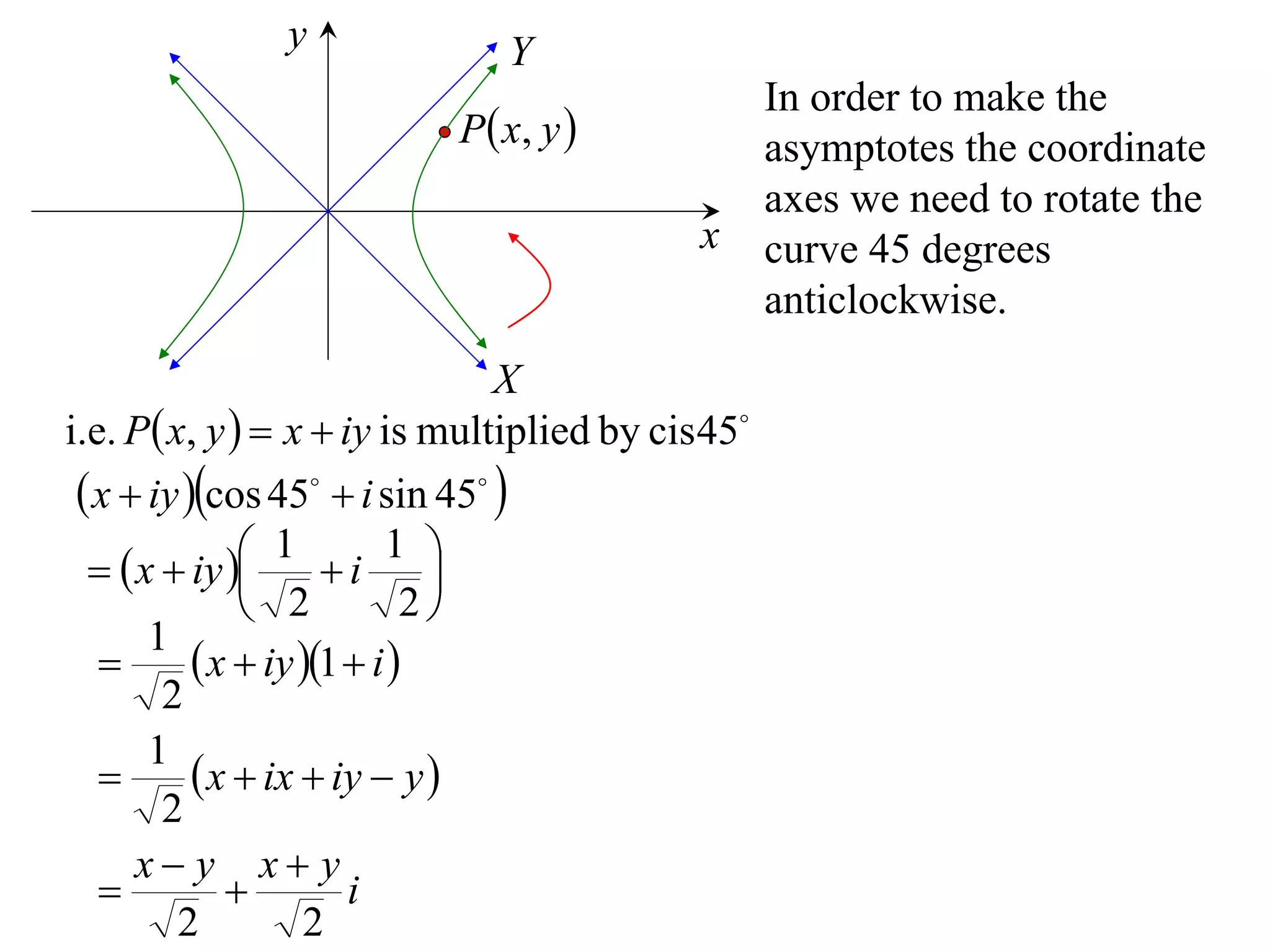
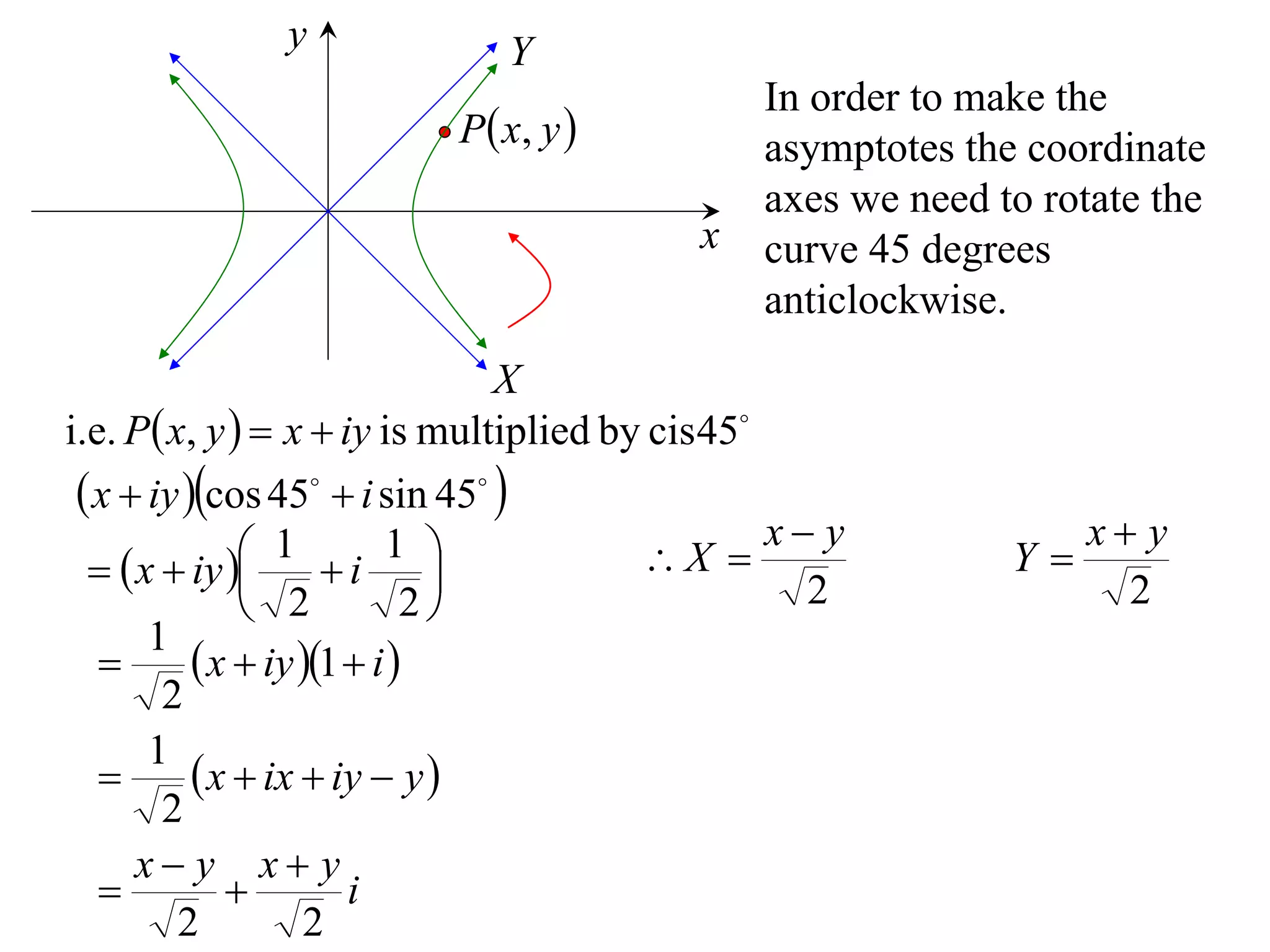
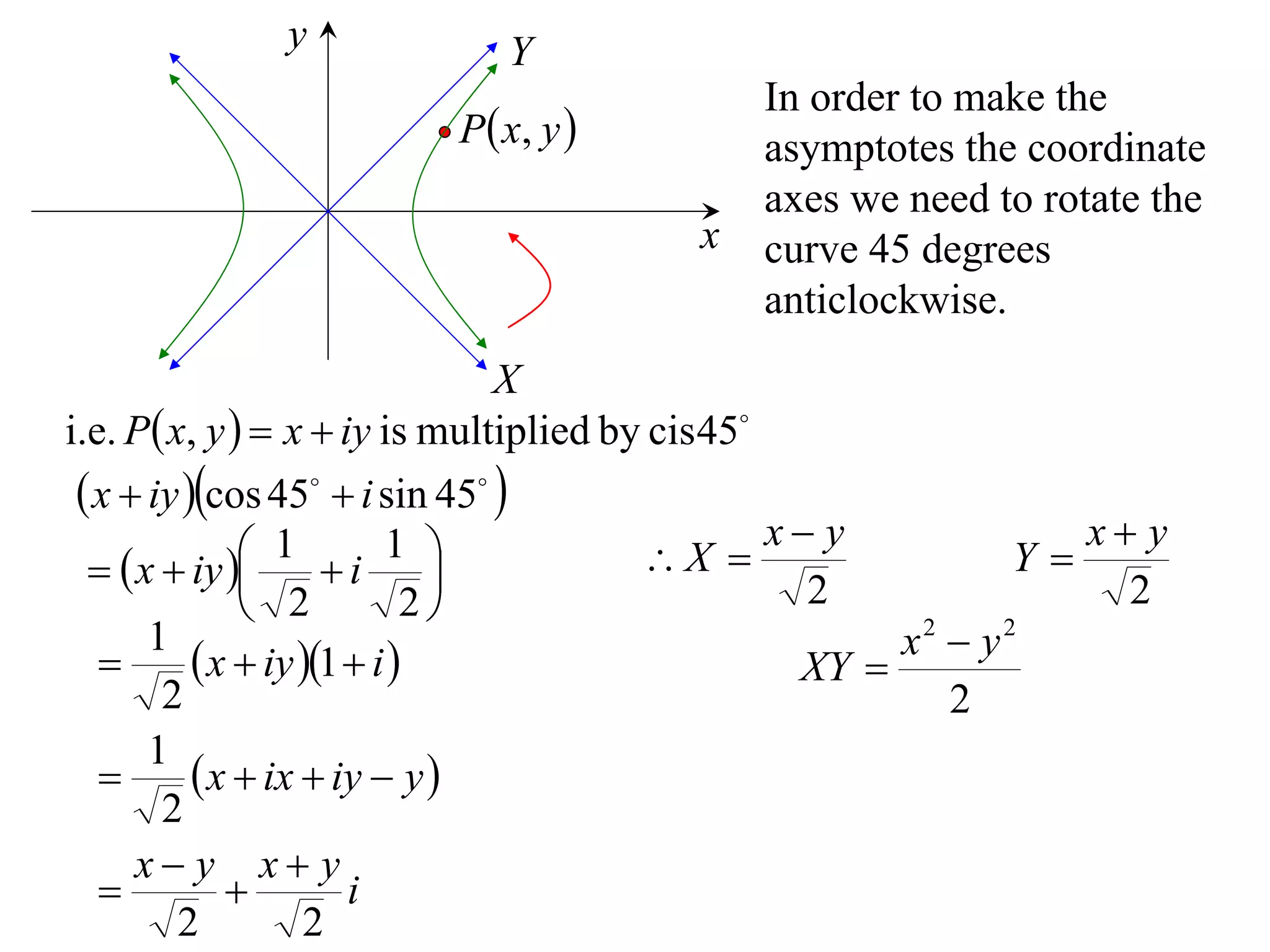
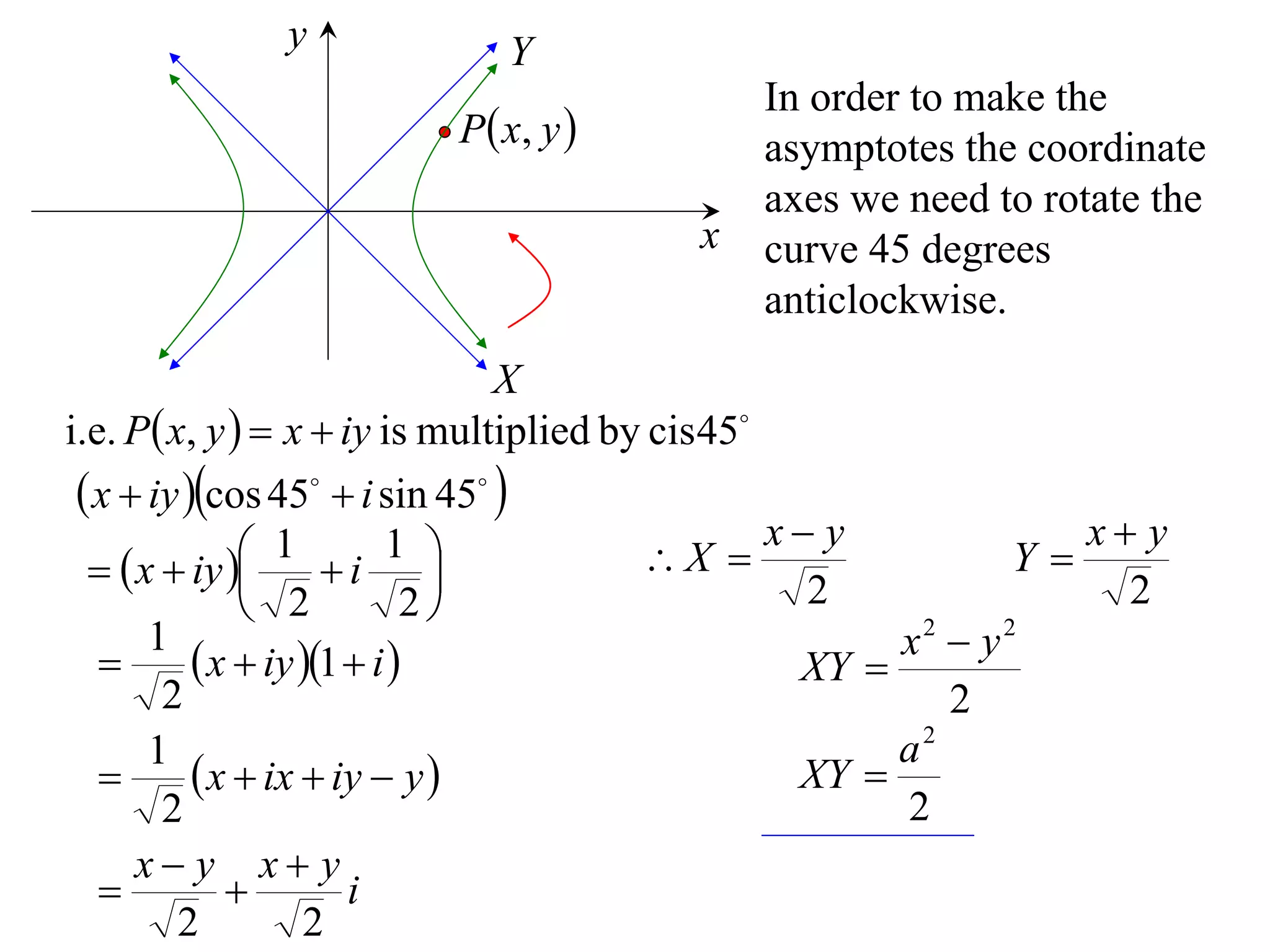
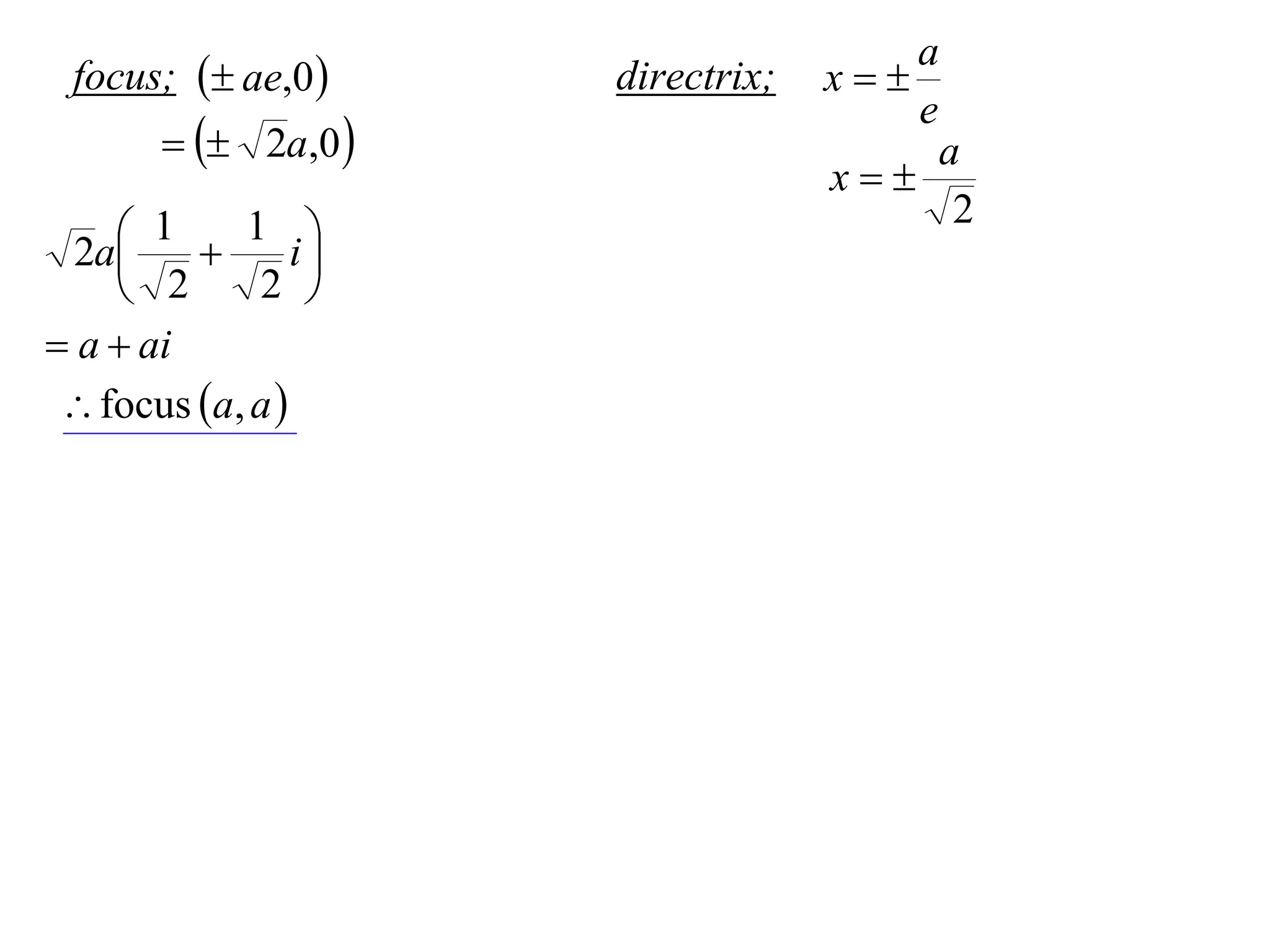
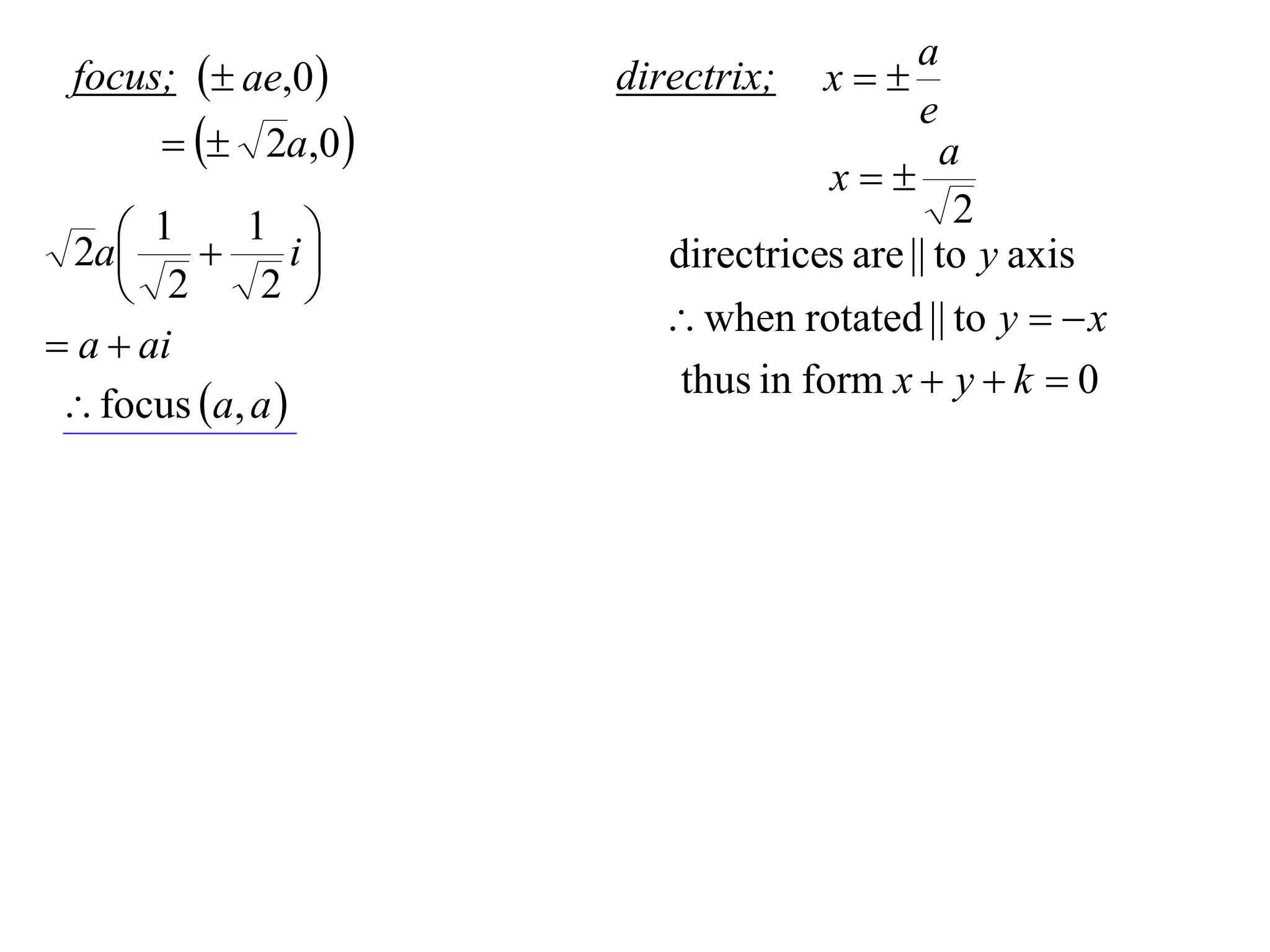
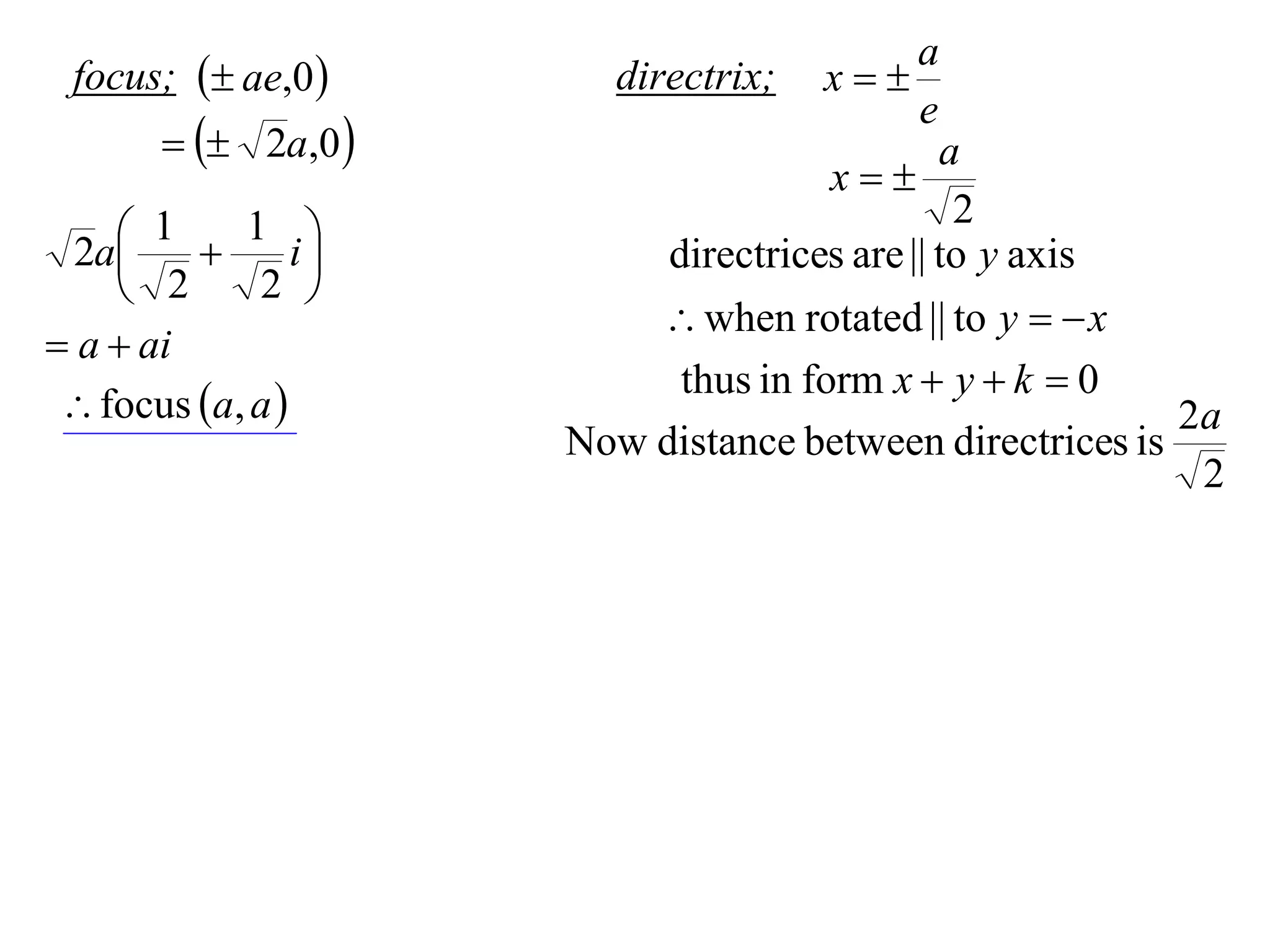
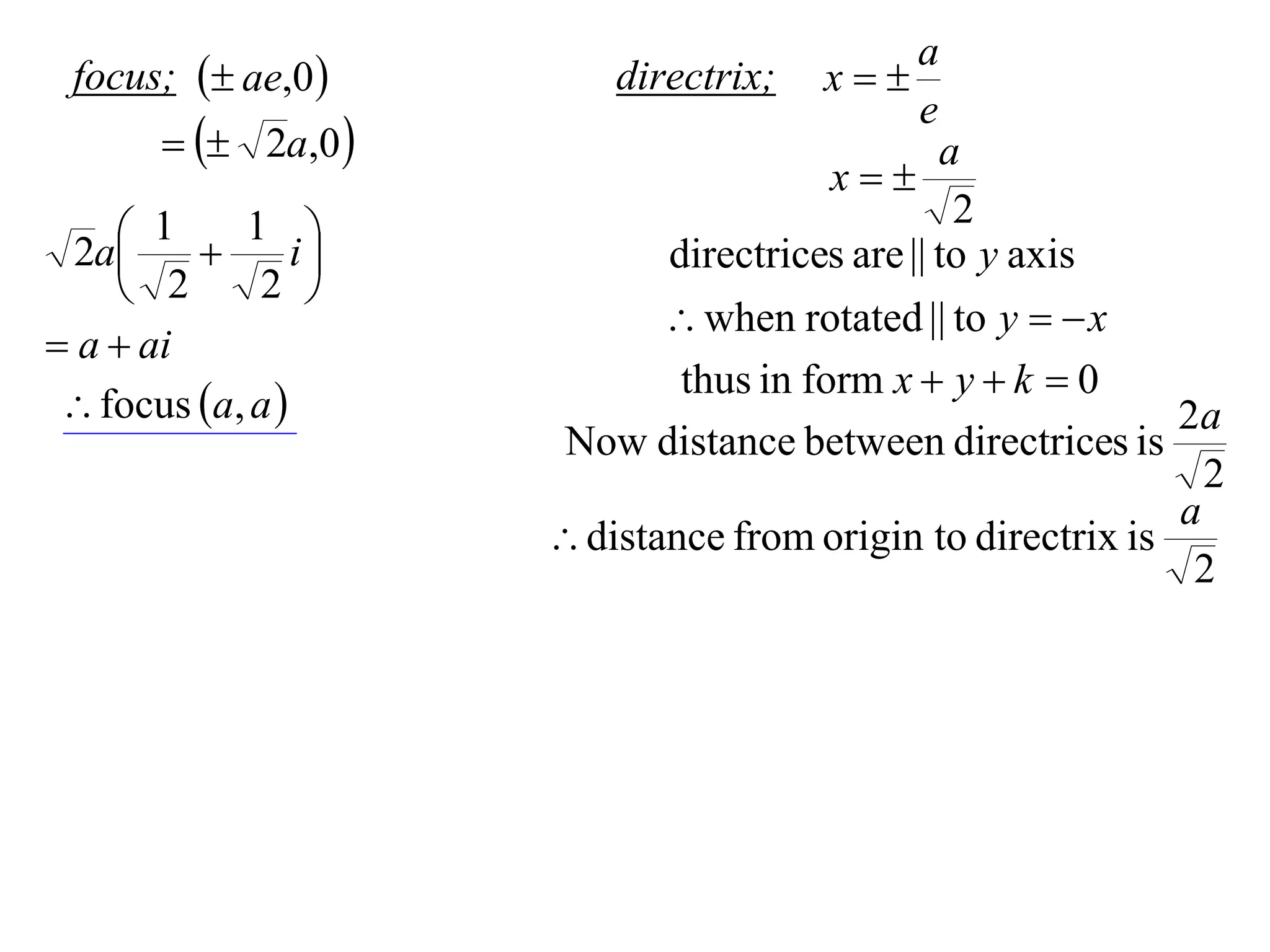
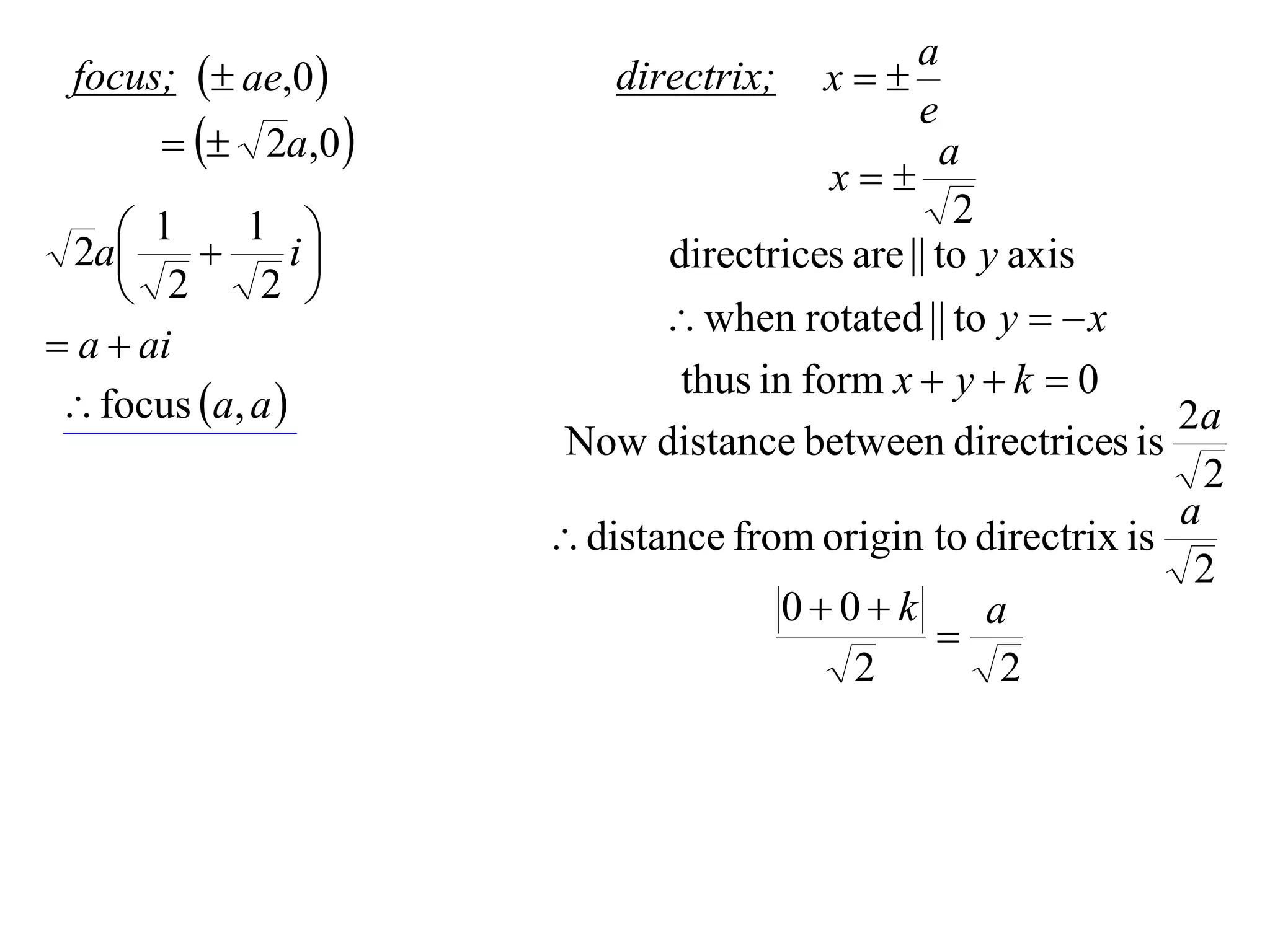
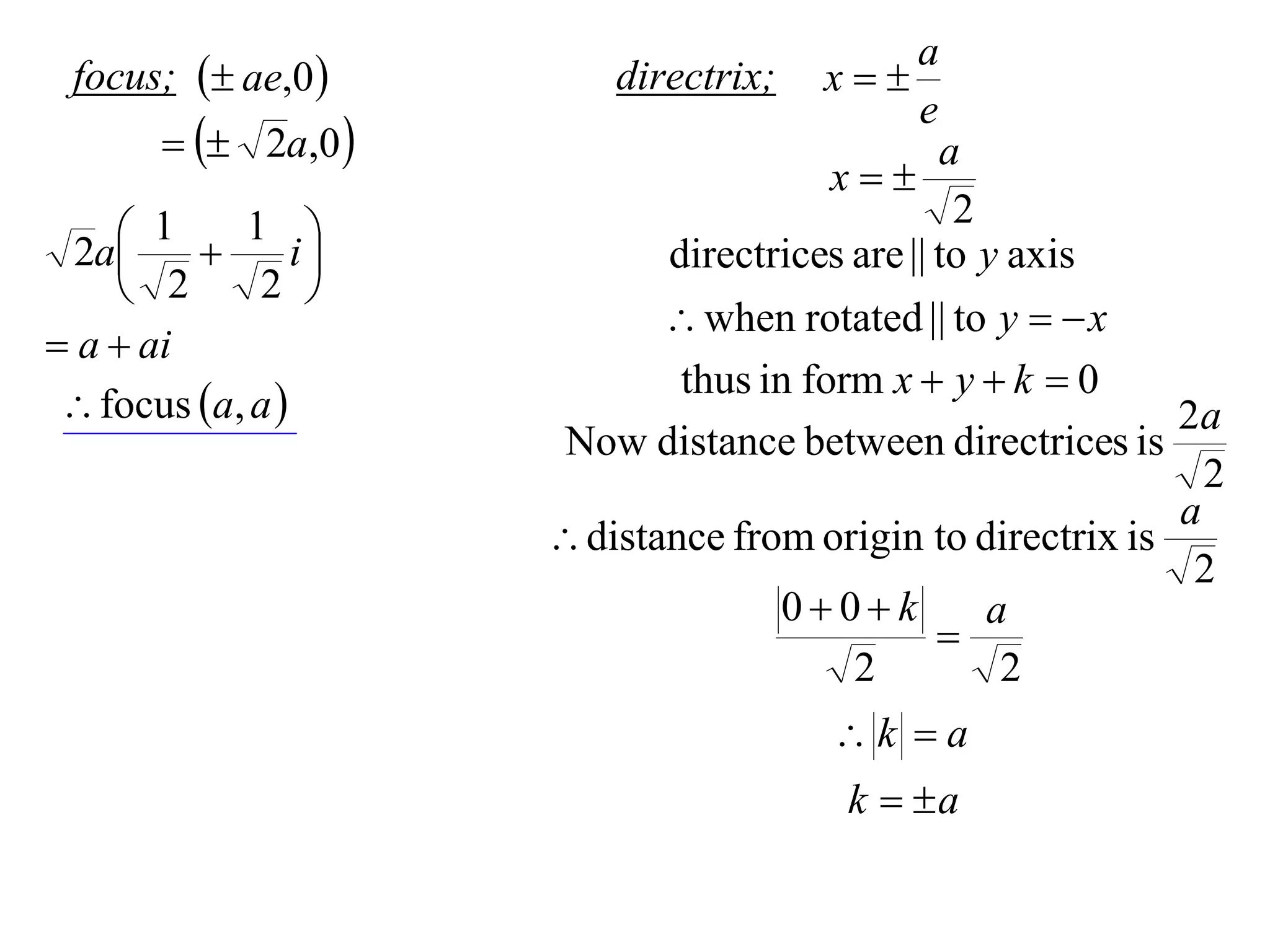
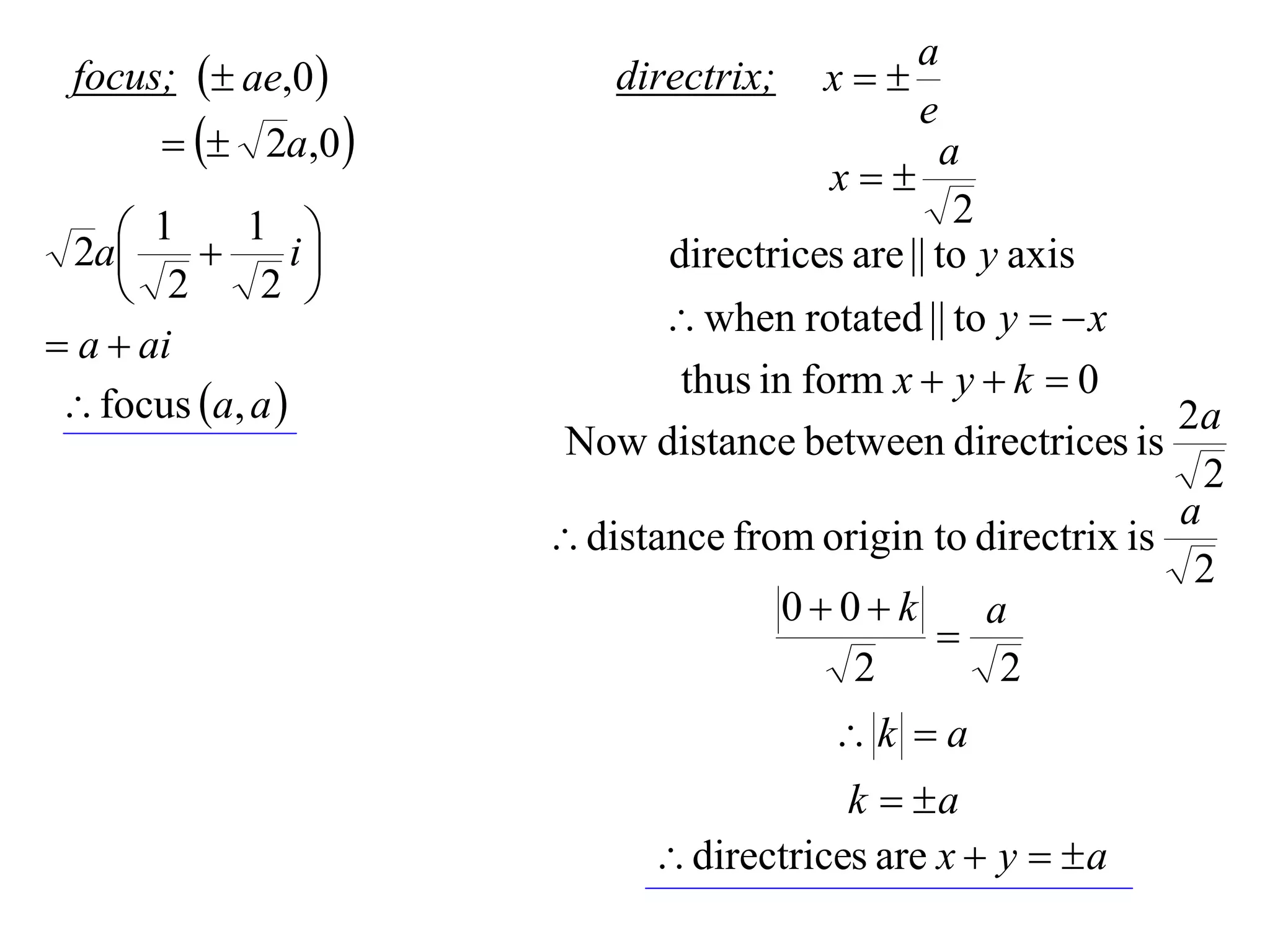
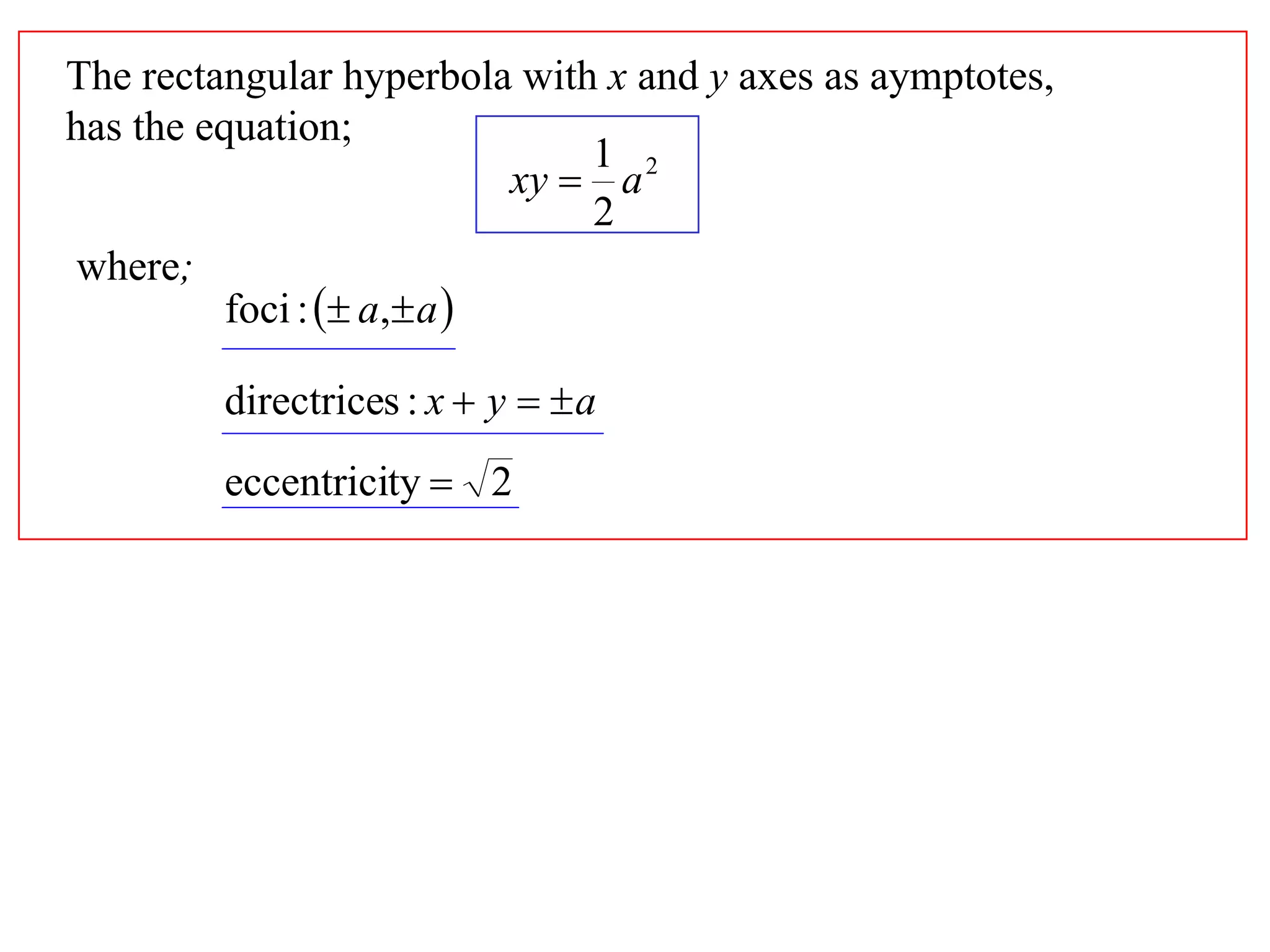
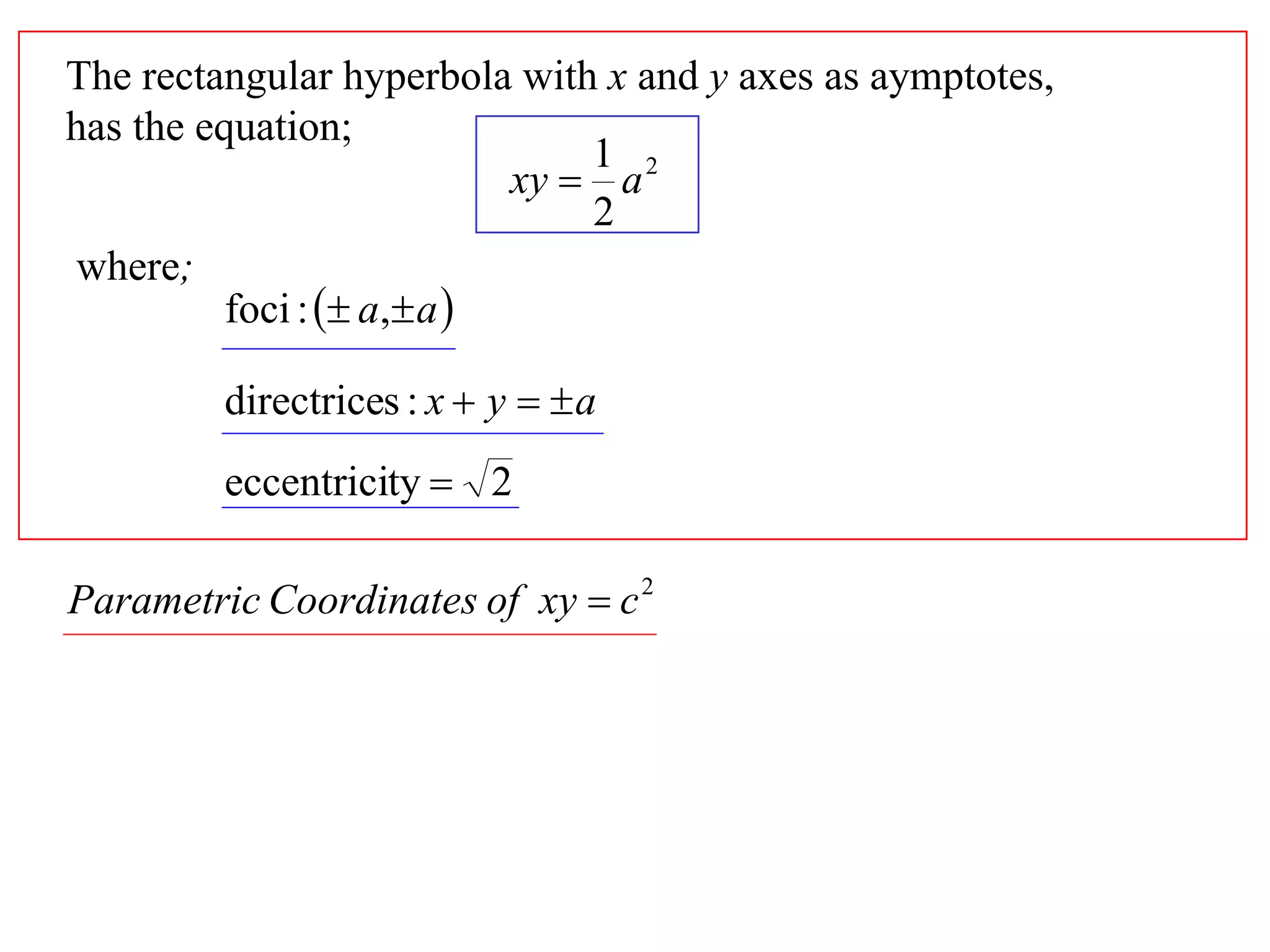
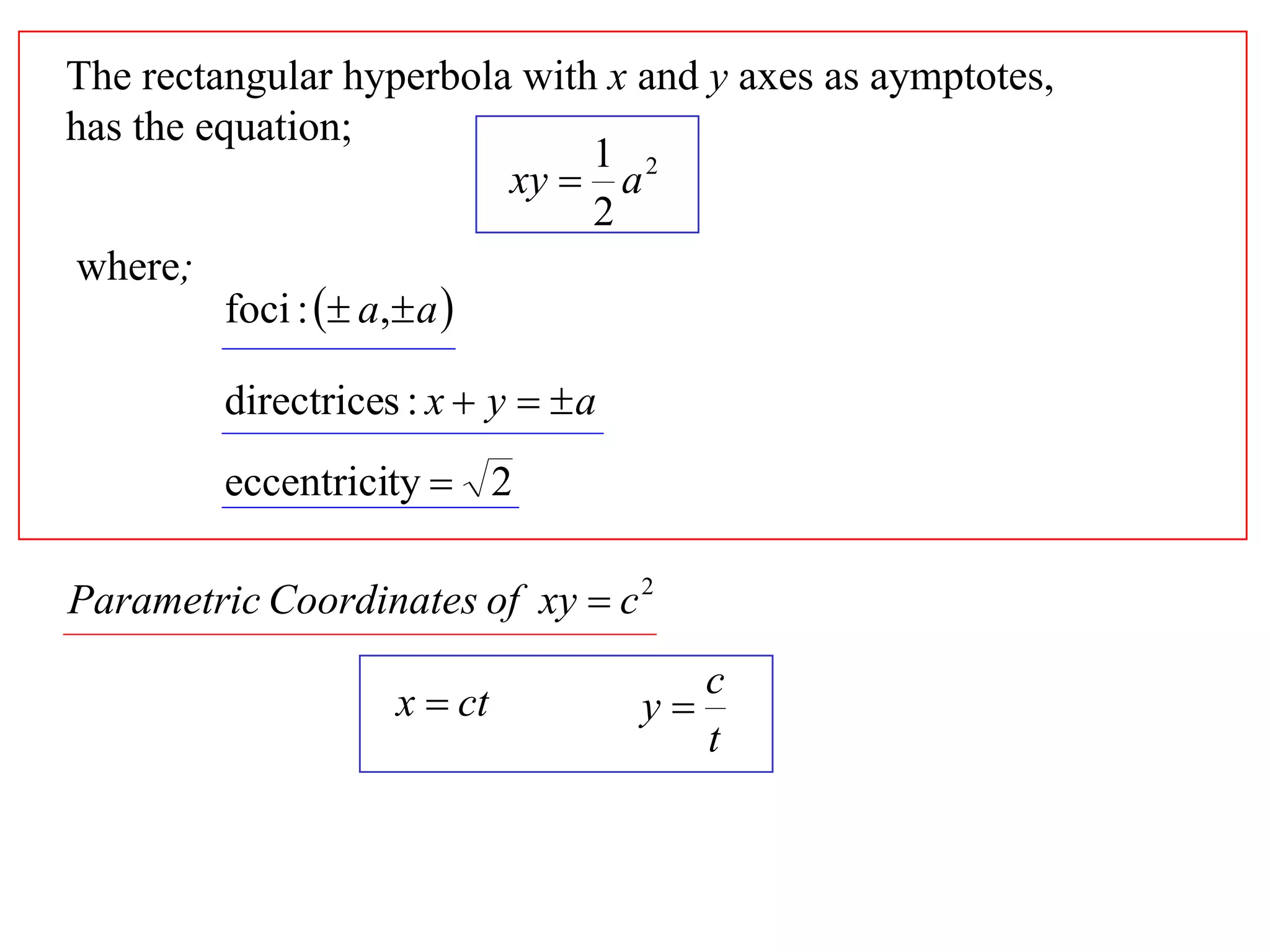
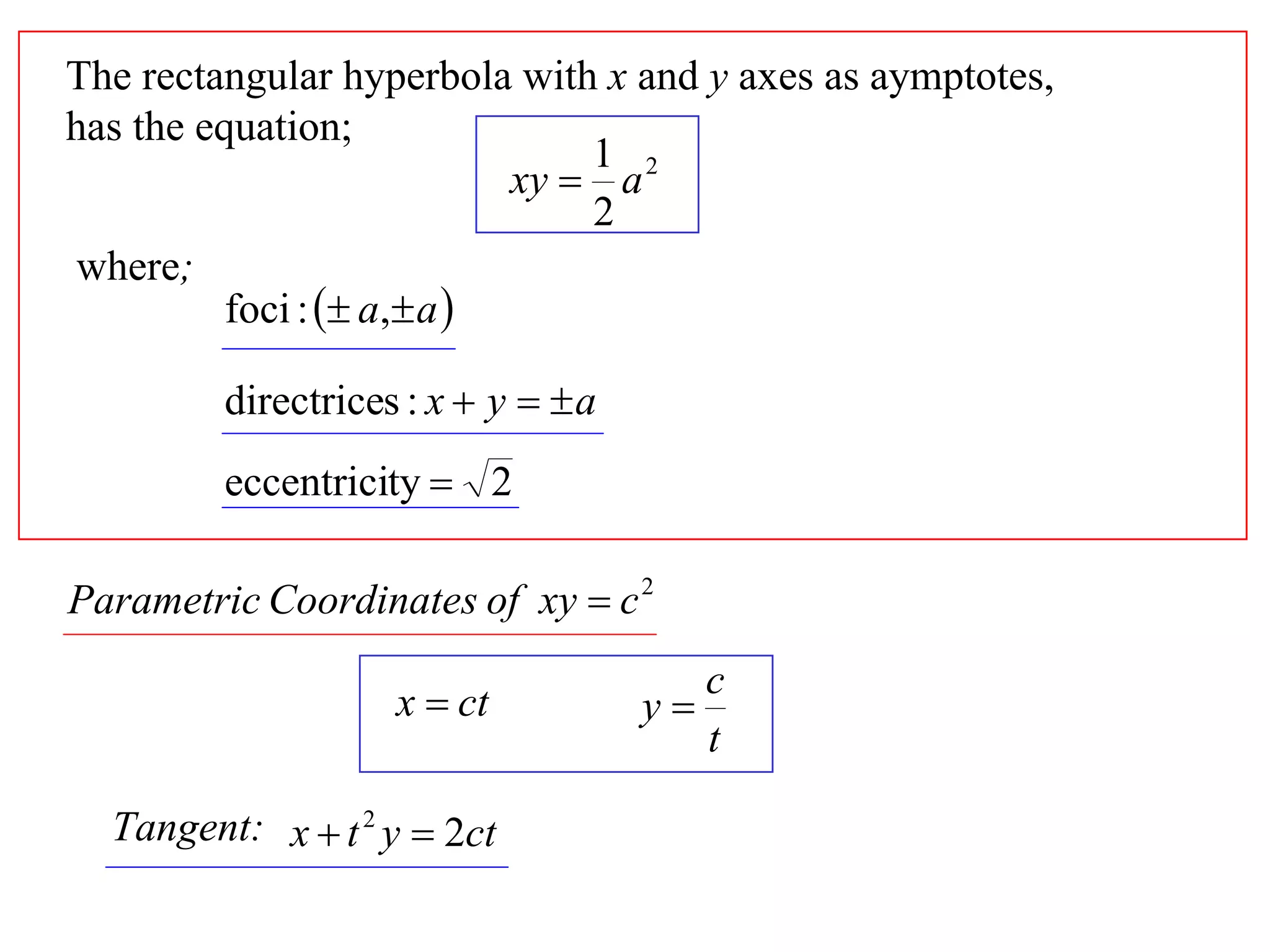
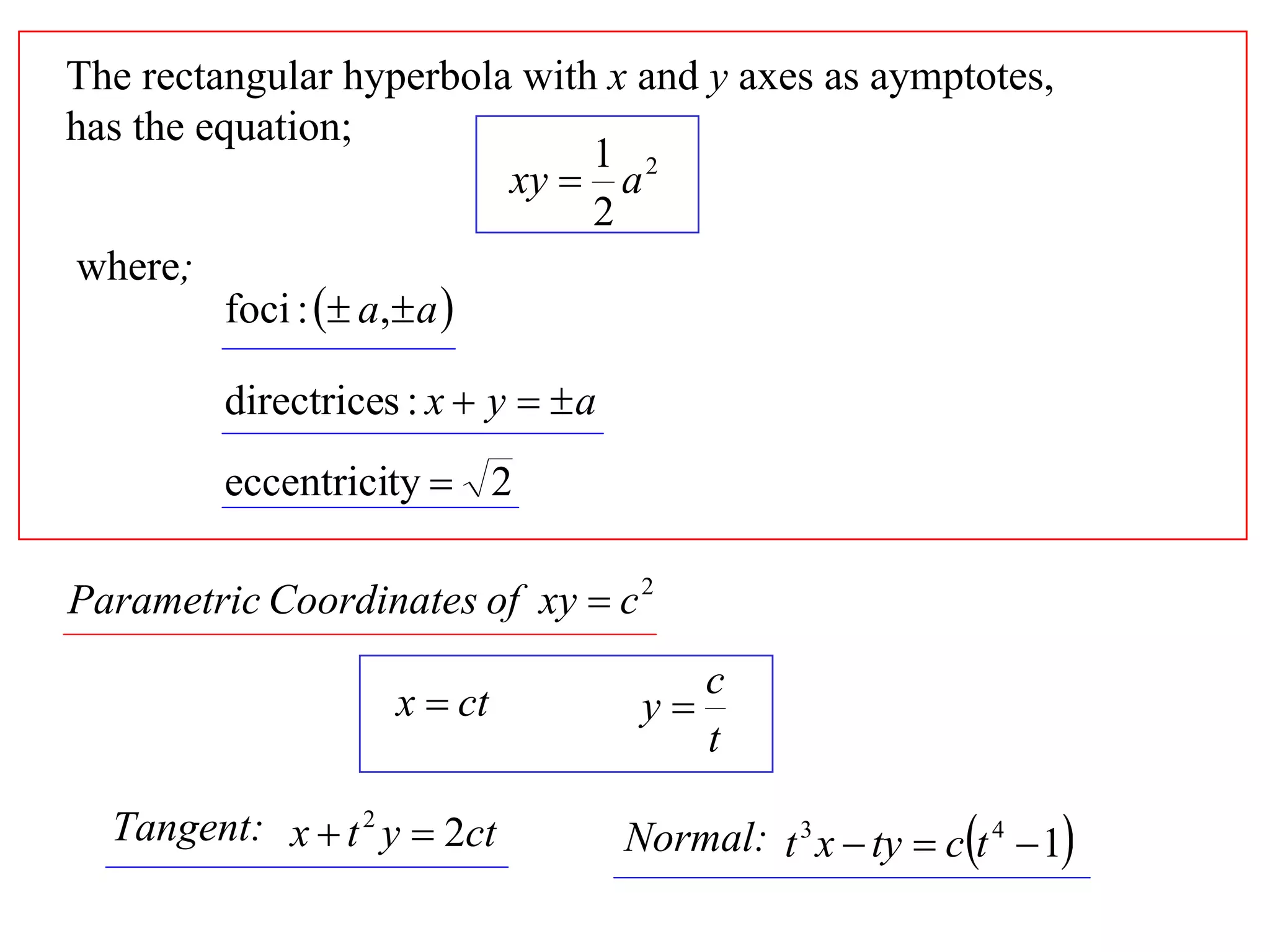
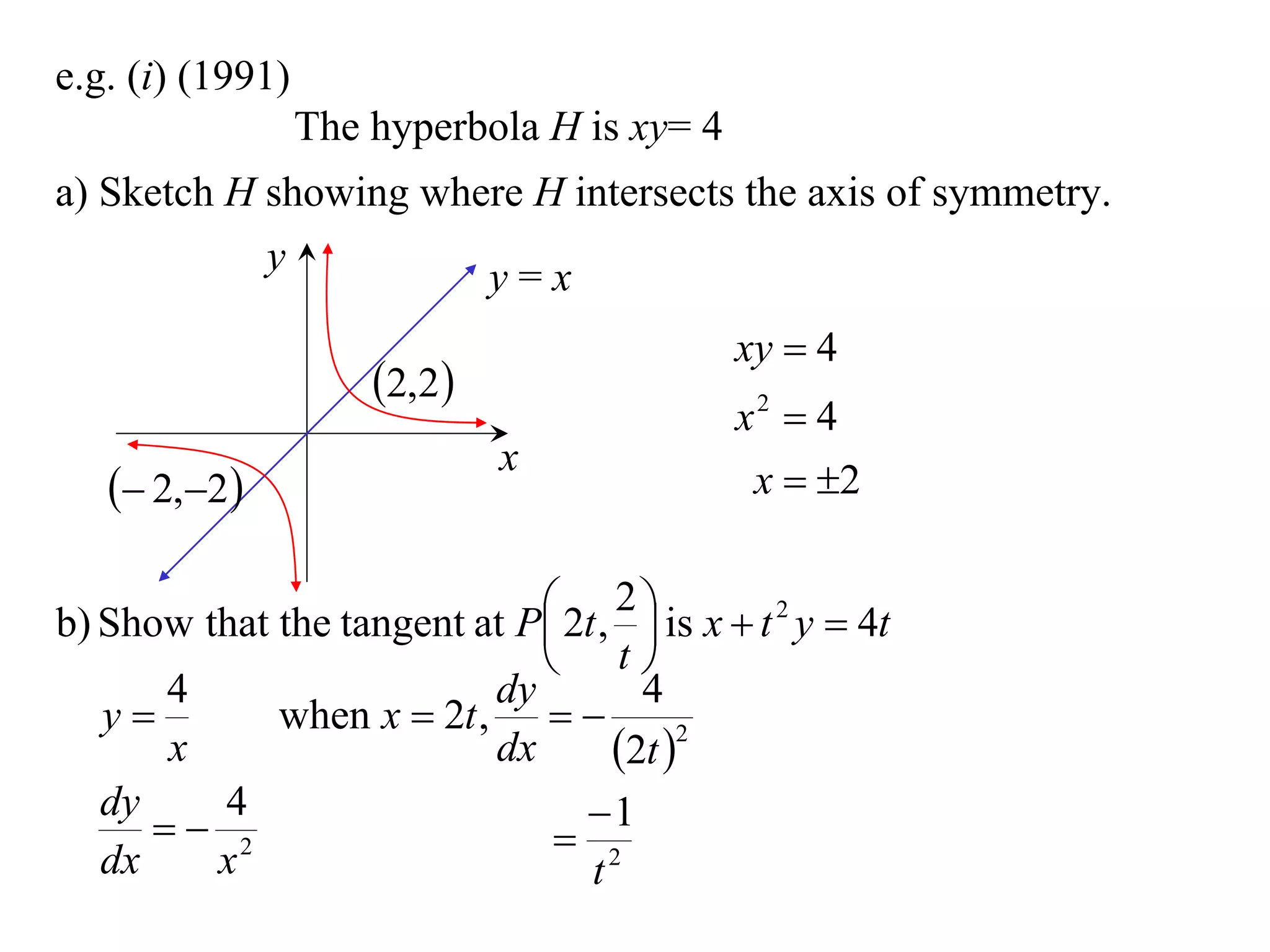
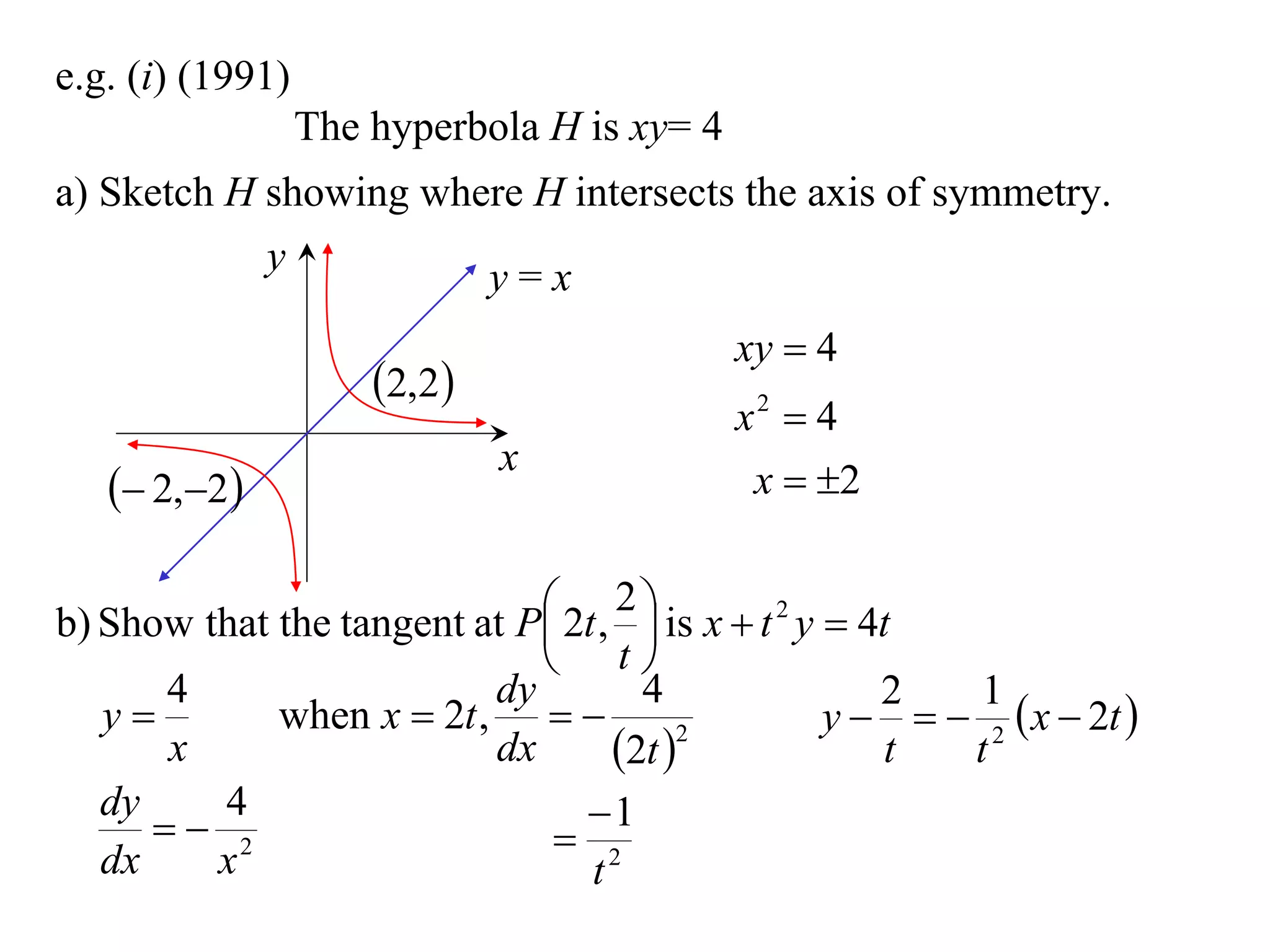
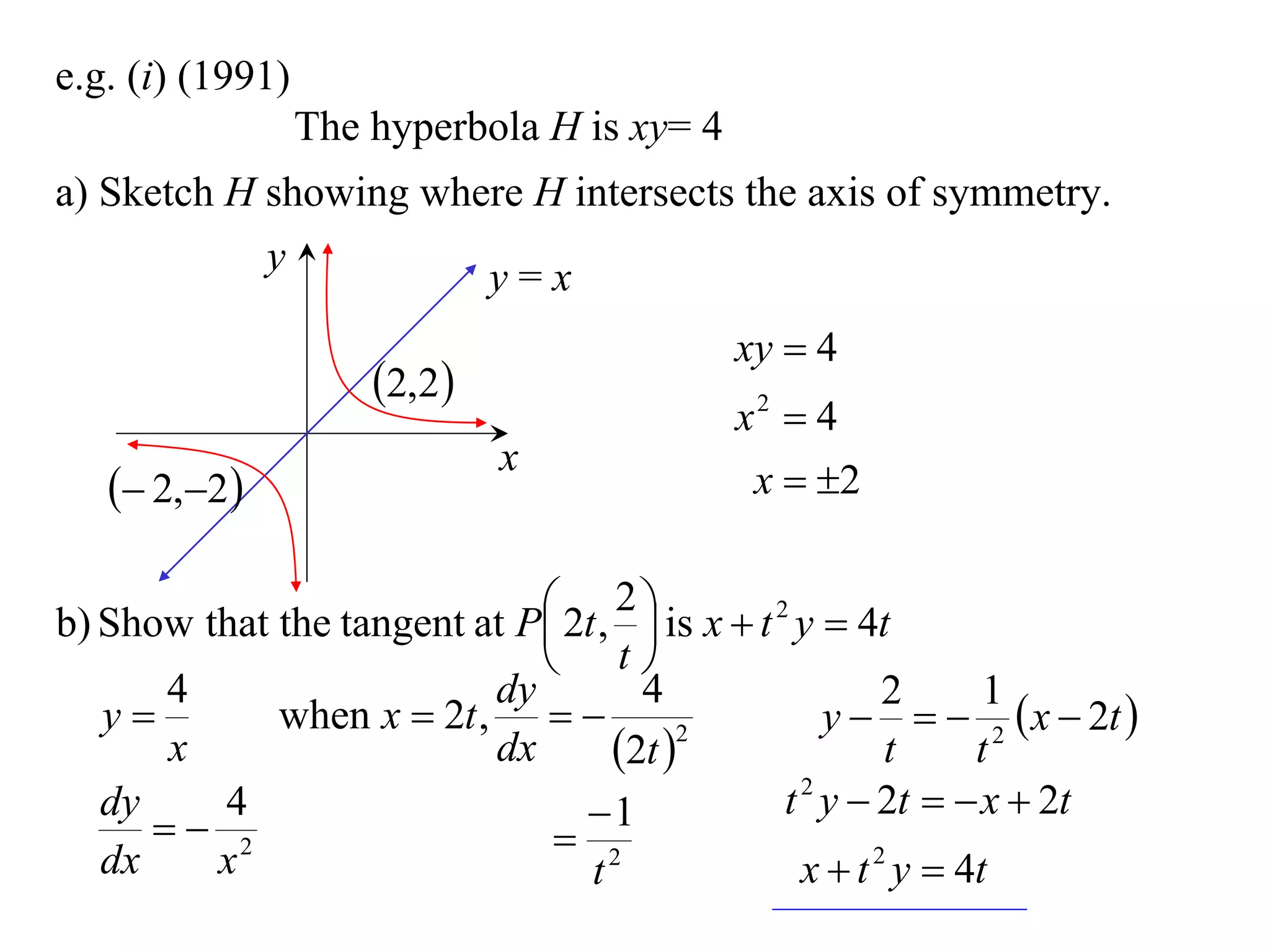
A rectangular hyperbola is a hyperbola whose asymptotes are perpendicular to each other. Its equation is x2/a2 - y2/a2 = 1. Rotating the hyperbola 45 degrees anticlockwise transforms its equation to (x-y)2/a2 - (x+y)2/a2 = 1. The foci are located at (a,a) and (-a,-a). The directrices are the lines x = ±a/e, where the eccentricity e=2. The distance between the directrices is 2a.