Downloaded 198 times

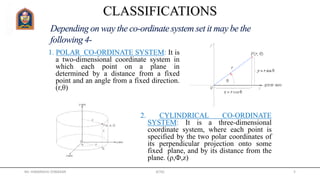
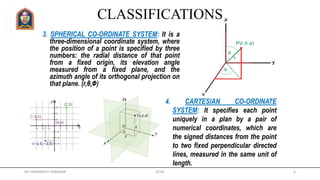
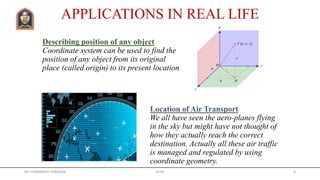
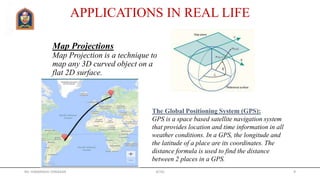
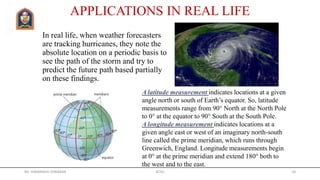
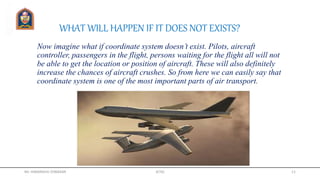
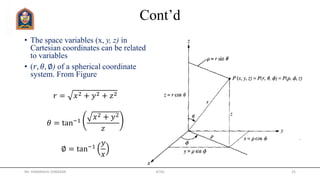

This document provides information about different coordinate systems including polar, cylindrical, Cartesian, and spherical coordinate systems. It describes key aspects of each system such as their components, definitions, relationships between variables in different systems, and applications. Real-world examples of how coordinate systems are used for map projections, global positioning systems, and air traffic control are also discussed.























































































