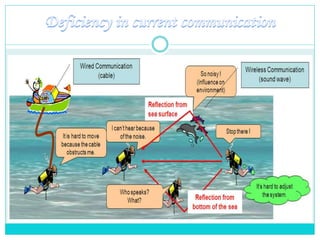
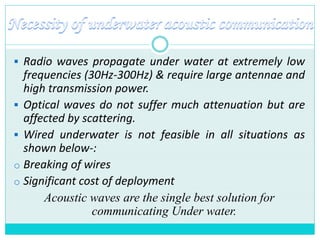
This document discusses underwater acoustic communication. It notes deficiencies in current communication methods and the necessity of acoustic communication. It provides an overview of acoustic communication models and modems. Applications are described including controlling autonomous underwater vehicles and sensors. Limitations are outlined such as limited bandwidth and battery power. The conclusion states the goal is to overcome limitations and implement advanced acoustic technology for oceanographic research.