Downloaded 403 times


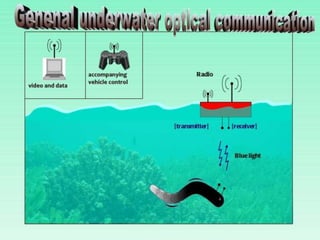

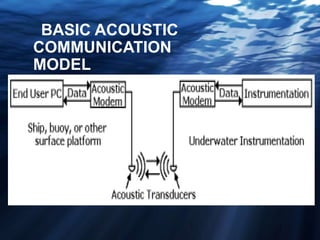
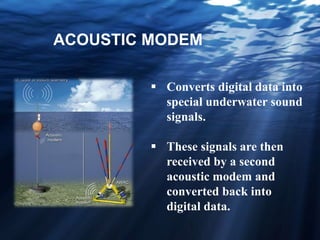
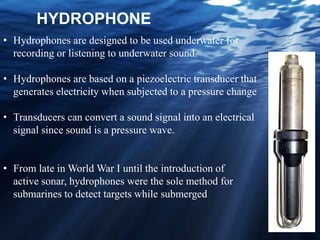
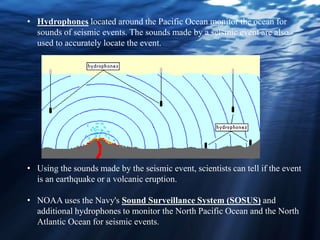
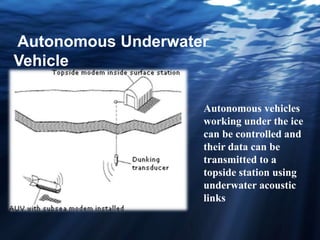
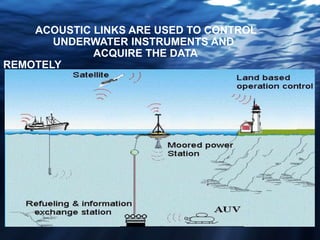

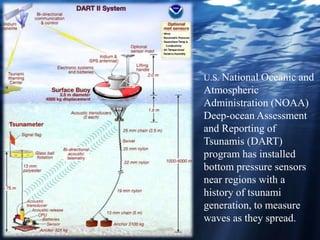
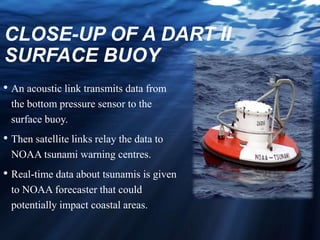
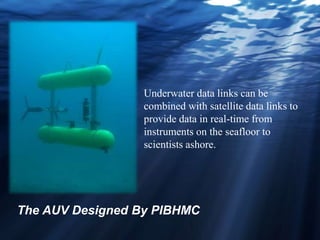


Underwater communication primarily uses acoustic waves to transmit messages, complicated by challenges like multi-path propagation and signal attenuation. Hydrophones, devices designed for underwater sound recording, play a vital role alongside acoustic modems that convert digital data into sound signals for remote data collection. Technologies such as sonar and autonomous underwater vehicles (AUVs) utilize these principles for various applications, including seismic event monitoring and underwater object detection.