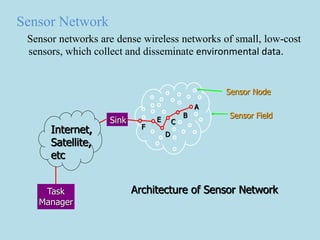
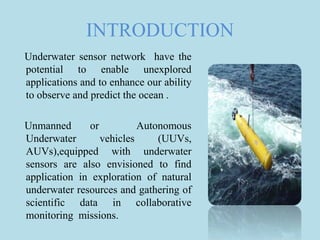
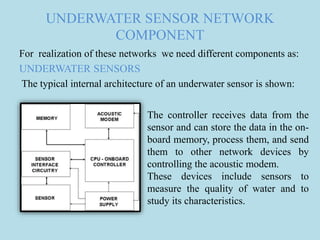
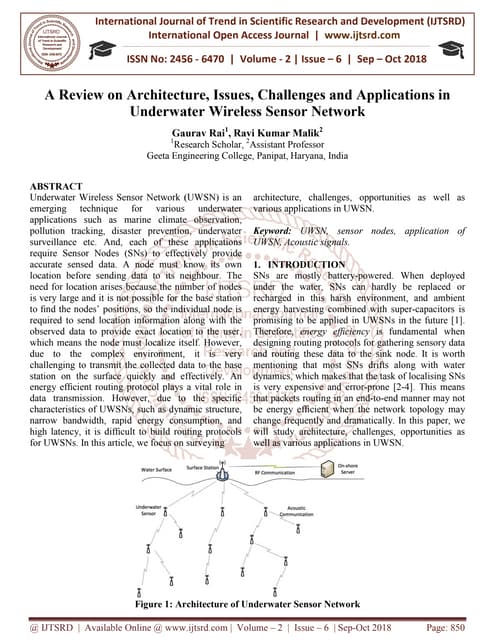
Underwater sensor networks have the potential to enable new applications and enhance ocean observation. They consist of sensors, autonomous underwater vehicles, and communication architecture. Challenges include limited bandwidth, multipath effects, and power constraints. The network topology and protocol stack must be designed to address issues like delays and bandwidth restrictions. Underwater sensor networks differ from terrestrial networks in deployment, power, memory and other factors due to the underwater environment. They can be used for applications like environmental monitoring, exploration, and disaster prevention.