Downloaded 556 times
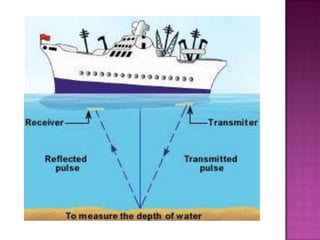
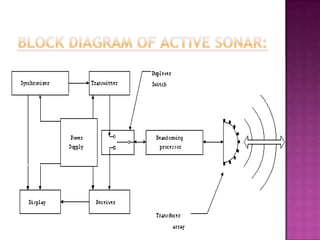
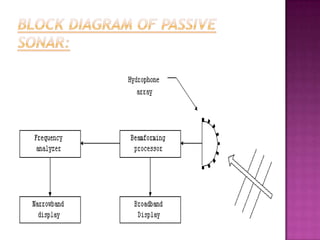
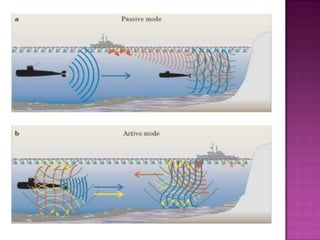
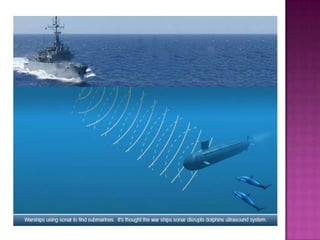

The document discusses sonar, which uses sound waves to detect underwater objects. It describes how sonar works by transmitting sound pulses and measuring the reflection to determine distances. There are two main types: active sonar, which transmits pulses and listens for echoes, and passive sonar, which only listens for sounds without transmitting. The document outlines the key components of sonar systems and how they are used for applications like mapping ocean depths and detecting ships and submarines. It also notes some negative impacts on marine animals.