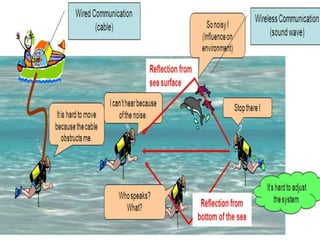
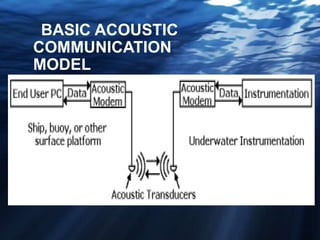
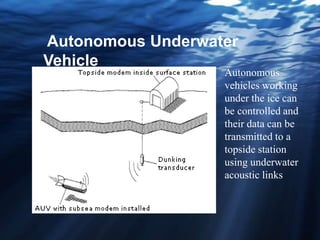
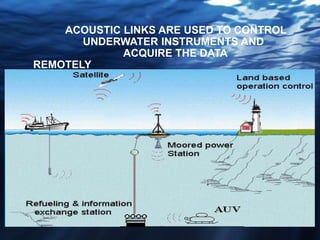
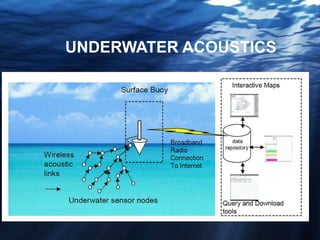
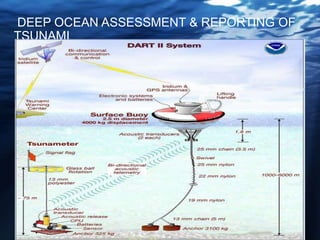
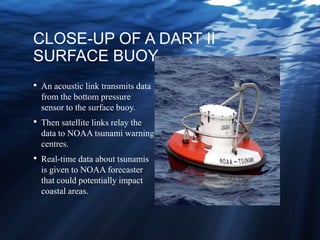
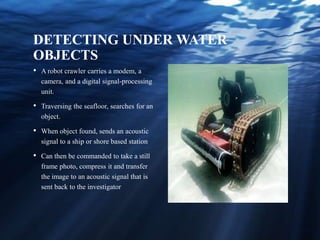
Underwater acoustic communication uses sound waves to transmit data underwater instead of electromagnetic waves. It allows remote control of underwater instruments and real-time data transmission. Examples include acoustic modems that convert digital data to sound signals, the Deep-ocean Assessment and Reporting of Tsunamis program's acoustic sensors that detect tsunamis, and robotic crawlers equipped with cameras and modems that can locate underwater objects and transmit images.