Downloaded 32 times




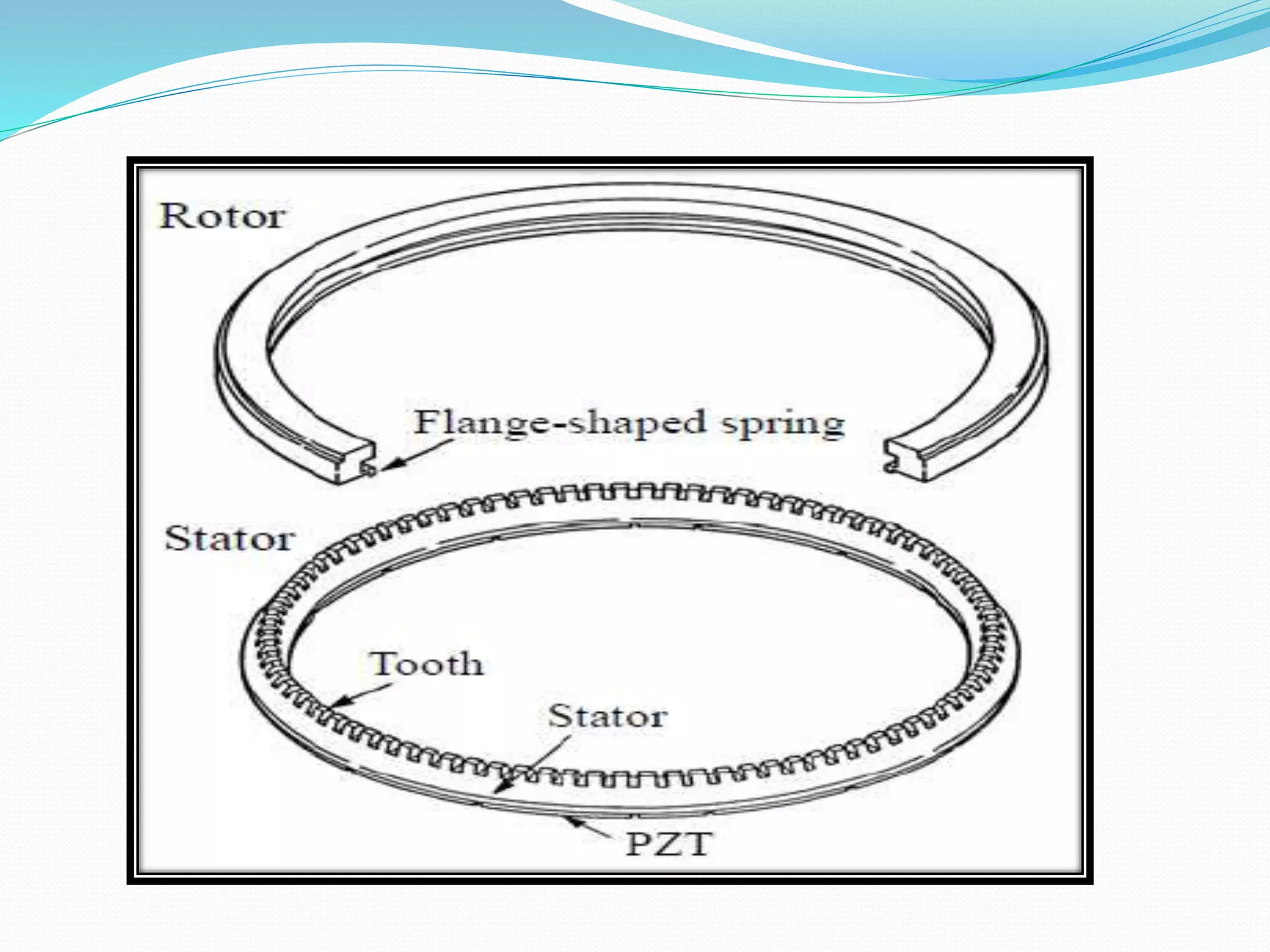









This document discusses ultrasonic motors, which use ultrasonic vibrations from a piezoelectric transducer to generate torque. It describes how they work by establishing a traveling wave on the stator that causes elliptical motion to propel the rotor. Ultrasonic motors are classified based on their mode of operation, type of motion, and shape. Their advantages include compact size, high accuracy, and resistance to electromagnetic fields. Applications include camera autofocus systems, medical equipment, and small robotics. Future work may include using ultrasonic motors in miniature surgical robots.