Downloaded 181 times



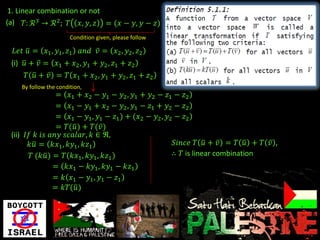
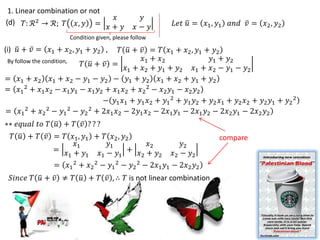

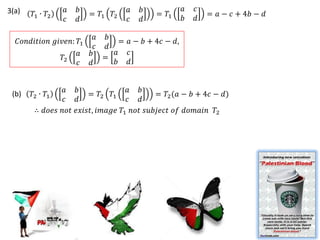
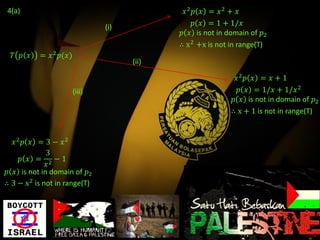
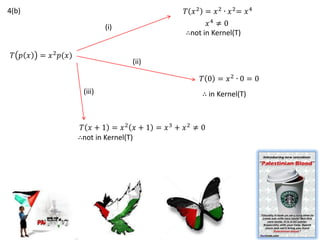
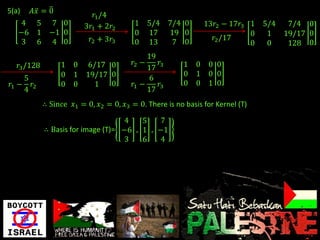
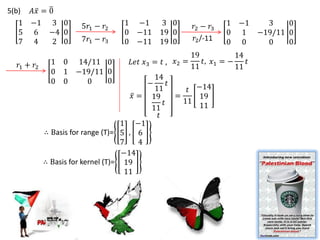


This document contains a summary of the key points from a linear algebra tutorial: 1. It provides examples of determining whether a transformation T is a linear combination or not based on checking if T(u+v)=T(u)+T(v) and T(ku)=kT(u). 2. It examines the relationship between compositions of transformations T1 and T2. 3. It explores the basis for the kernel and range of various linear transformations. 4. It works through examples of determining the basis for the kernel and range of specific transformations.