Transformasi Laplace merupakan salah satu metode untuk menyelesaikan persoalan sistem linier. Terdapat beberapa definisi transformasi Laplace seperti transformasi Laplace bilateral dan unilateral. Transformasi Laplace memiliki berbagai sifat seperti linieritas, pergeseran waktu dan domain, diferensiasi, dan integrasi. Transformasi Laplace dapat digunakan untuk menyelesaikan berbagai masalah seperti analisis rangkaian RLC.


![Page 5 of 17
SISTEM LINIER, Transformasi Laplace
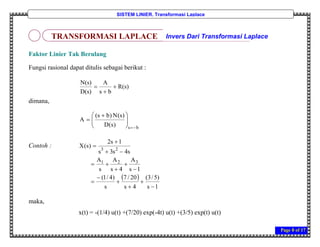
Modulasi
Jika x(t) X(s)
maka x(t) cost (1/2)[X(s+j) + X(s-j)]
x(t) sint (j/2)[ X(s+j) - X(s-j)]
untuk sebarang bilangan riil .
Konvolusi
Jika x(t) X(s) dan h(t) H(s)
maka x(t)h(t) X(s) H(s)
Dari hubungan y(t) = x(t)h(t),
maka Y(s) = X(s) H(s),
sehingga kita peroleh :
)s(X
)s(Y
)s(H , H(s) dikenal sebagai fungsi alih sistem.
TRANSFORMASI LAPLACE Sifat-sifat Transformasi Laplace](https://image.slidesharecdn.com/linearsystem05slides-200228010931/85/Transformasi-Laplace-5-320.jpg)


![Page 10 of 17
SISTEM LINIER, Transformasi Laplace
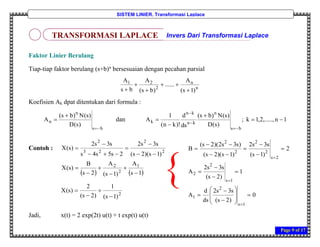
Faktor Orde-2 Tak Berulang
Jika terdapat faktor orde-2 yang tidak dapat disederhanakan, maka dibentuk pecahan :
Cara terbaik untuk mendapatkan koefisien dari polinomial di atas adalah dengan menyamakan
koefisien dari pangkat s.
Contoh :
sehingga
x(t) = [3 cos2t + sin2t - (5/2) exp(t/2)] u(t)
qpss
BAs
2
1s2
C
4s
BAs
4s8ss2
21ss
)s(X
2
23
2
2/1s
2/5
4s
1
4s
s3
1s2
5
4s
1s3
)s(X 222
TRANSFORMASI LAPLACE Invers Dari Transformasi Laplace
s2
- s - 21 = ( As + B )( 2s - 1) + C( s2
+ 4 )
= ( 2A + C )s2
+ (-A + B )s - B + 4
A = 3, B = 1, C = -5
](https://image.slidesharecdn.com/linearsystem05slides-200228010931/85/Transformasi-Laplace-10-320.jpg)