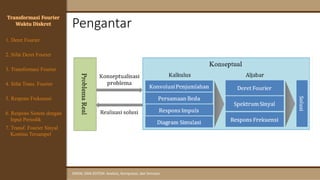
Dokumen ini membahas analisis, komputasi, dan simulasi sinyal dan sistem dengan fokus pada transformasi Fourier waktu diskret, termasuk deret Fourier dan respons frekuensi. Berbagai konsep seperti linearitas, pergeseran waktu, dan konvolusi dijelaskan secara mendetail dengan penekanan pada sifat-sifat transformasi Fourier. Keseluruhan informasi berfungsi untuk memahami interaksi antara sinyal dan sistem dalam konteks teknik kontrol dan rekayasa elektro.
![f(t) f[n]
F(w) F(W)
F(s) F(z)
Control Systems Engineering, Electrical Engineering Department, FTEIC-ITS
Matlab Computation Simulink Simulation
TRANSFORMASI FOURIER WAKTU DISKRET
Analisis, Komputasi, dan Simulasi
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-1-320.jpg)
![f(t) f[n]
F(w) F(W)
F(s) F(z)
Control Systems Engineering, Electrical Engineering Department, FTEIC-ITS
Matlab Computation Simulink Simulation
TRANSFORMASI FOURIER WAKTU DISKRET
Analisis, Komputasi, dan Simulasi
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/75/6-Transformasi-Fourier-Waktu-Diskret-pdf-1-2048.jpg)
![Deret Fourier Waktu Diskret
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
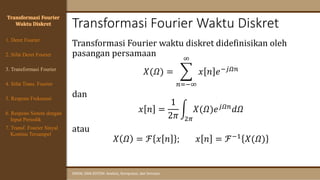
Transformasi Fourier
Waktu Diskret
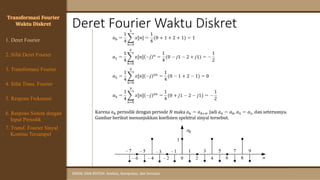
Deret Fourier Waktu Diskret didefinisikan melalui pasangan
persamaan berikut.
Persamaan Sintesis
𝑥[𝑛] =
𝑘=<𝑁>
𝑎𝑘𝑒𝑗𝑘(𝛺)𝑛
dan Persamaan Analisis
𝑎𝑘 =
1
𝑁
𝑛=<𝑁>
𝑥[𝑛]𝑒−𝑗𝑘(𝛺)𝑛
Koefisien deret Fourier 𝑎𝑘 disebut juga Koefisien Spektral.
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-4-320.jpg)

![1. Pergeseran waktu
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
Jika 𝑦[𝑛] = 𝑥[𝑛 − 𝑚],
Maka
𝑏𝑘 = 𝑎𝑘𝑒−𝑗𝑘𝛺𝑚
di mana
𝑏𝑘: koefisien deret 𝑦[𝑛]
𝑎𝑘: koefisien deret 𝑥[𝑛]
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-7-320.jpg)
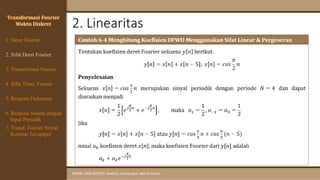
![2. Linearitas
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
Jika 𝑧[𝑛] = 𝛼𝑥[𝑛] + 𝛽𝑦[𝑛]
Maka
𝑐𝑘 = 𝛼𝑎𝑘 + 𝛽𝑏𝑘
di mana
𝑐𝑘: koefisien deret 𝑧[𝑛]
𝑏𝑘: koefisien deret 𝑦[𝑛]
𝑎𝑘: koefisien deret 𝑥[𝑛]
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-8-320.jpg)
![3. Konvolusi periodik
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
Jika 𝑧[𝑛] = 𝑥[𝑛] ⊗ 𝑦[𝑛]
Maka
𝑐𝑘 = 𝑁𝑎𝑘𝑏𝑘
di mana
𝑐𝑘: koefisien deret 𝑧[𝑛]
𝑏𝑘: koefisien deret 𝑦[𝑛]
𝑎𝑘: koefisien deret 𝑥[𝑛]
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-10-320.jpg)
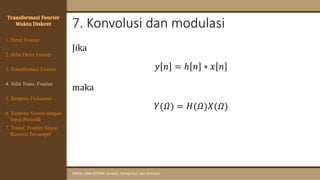
![4. Konvolusi penjumlahan
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
Jika 𝑦[𝑛] = 𝑥[𝑛] ∗ ℎ[𝑛]
Maka
𝑏𝑘 = 𝑎𝑘𝐻[𝑘𝛺]
di mana
𝑏𝑘: koefisien deret 𝑦[𝑛]
𝑎𝑘: koefisien deret 𝑥[𝑛]
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-11-320.jpg)
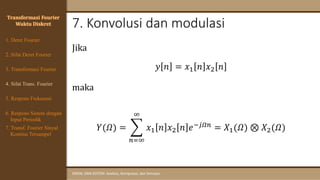
![5. Modulasi
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
Jika 𝑧[𝑛] = 𝑥[𝑛]𝑦[𝑛]
Maka
𝑐𝑘 = 𝑎𝑘 ⊗ 𝑏𝑘
di mana
𝑐𝑘: koefisien deret 𝑧[𝑛]
𝑏𝑘: koefisien deret 𝑦[𝑛]
𝑎𝑘: koefisien deret 𝑥[𝑛]
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-12-320.jpg)
![2. Linearitas
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Jika
ℱ 𝑥1[𝑛] = 𝑋1(𝛺) dan ℱ 𝑥2[𝑛] = 𝑋2(𝛺)
maka
ℱ 𝛼𝑥1[𝑛] + 𝛽𝑥2[𝑛] = 𝛼𝑋1(𝛺) + 𝛽𝑋2(𝛺)
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-17-320.jpg)
![3. Pergeseran waktu
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Jika
ℱ 𝑥[𝑛] = 𝑋(𝛺)
maka
ℱ 𝑥 𝑛 − 𝑛0 = 𝑒−𝑗𝛺𝑛0𝑋(𝛺)
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-18-320.jpg)
![4. Pergeseran frekuensi
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Jika
ℱ 𝑥[𝑛] = 𝑋(𝛺)
maka
ℱ 𝑥 𝑛 𝑒𝑗𝛺0𝑛 = 𝑋 𝛺 − 𝛺0
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-19-320.jpg)
![5. Derivatif dalam domain frekuensi
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Jika
ℱ 𝑥[𝑛] = 𝑋(𝛺)
maka
ℱ 𝑛𝑥 𝑛 = 𝑗
𝑑𝑋(𝛺)
𝑑𝛺
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-20-320.jpg)

![6. Teorema Parseval
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel
Energi sinyal waktu diskret
𝐸 = lim
𝑁→∞
𝑛=−𝑁
𝑁
𝑥[𝑛] 2
=
𝑛=−∞
∞
𝑥[𝑛] 2
Dalam domain-𝛺 menjadi
𝐸 =
𝑛=−∞
∞
𝑥[𝑛] 2 =
1
2𝜋
න
−𝜋
𝜋
𝑋(𝛺) 2𝑑𝛺](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-22-320.jpg)
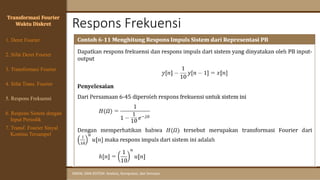
![Respons Frekuensi
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Respons Frekuensi atau Fungsi Transfer Sinusoidal dari sistem.
𝐻(𝛺) =
𝑘=−∞
∞
ℎ[𝑘] 𝑒−𝑗𝛺𝑘
Perhatikan bahwa respons frekuensi tidak lain merupakan transformasi Fourier
dari respons impuls.
Jika 𝑋(𝛺), 𝑌(𝛺) dan 𝐻(𝛺) masing-masing merupakan transformasi Fourier dari
𝑥[𝑛], 𝑦[𝑛] dan ℎ[𝑛], maka
𝐻(𝛺) =
𝑌(𝛺)
𝑋(𝛺)
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-25-320.jpg)
![Respons Frekuensi
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel
Berdasar PB input-output sistem
𝑘=0
𝑁
𝑎𝑘 𝑦[𝑛 − 𝑘] =
𝑘=0
𝑀
𝑏𝑘𝑥[𝑛 − 𝑘]
Respons Frekuensi dapat diperoleh
𝐻(𝛺) =
𝑌(𝛺)
𝑋(𝛺)
=
σ𝑘=0
𝑀
𝑏𝑘𝑒−𝑗Ω𝑘
σ𝑘=0
𝑁
𝑎𝑘𝑒−𝑗Ω𝑘](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-26-320.jpg)
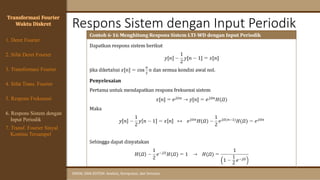
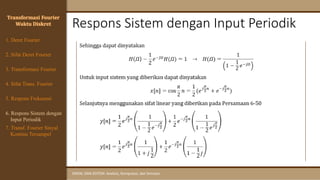
![Respons Sistem dengan Input Periodik
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Jika
𝑥[𝑛] = 𝑒𝑗𝛺𝑛 → 𝑦[𝑛] = 𝑒𝑗𝛺𝑛𝐻(𝛺)
Maka
𝑥[𝑛] =
𝑘=−∞
∞
𝑎𝑘 𝑒𝑗𝑘𝛺𝑛
→ 𝑦[𝑛] =
𝑘=−∞
∞
𝑎𝑘 𝑒𝑗𝑘𝛺𝑛
𝐻(𝛺𝑘)
atau
𝑦 𝑛 =
𝑘=−∞
∞
𝑑𝑘𝑒𝑗𝑘𝛺𝑛 ; 𝑑𝑘 = 𝑎𝑘𝐻(𝛺𝑘)
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-28-320.jpg)
![Transformasi Fourier Sinyal Tersampel
SINYAL DAN SISTEM: Analisis, Komputasi, dan Simulasi
Jika sinyal kontinu 𝑥𝑎(𝑡) disampling, maka sinyal tersampel tersebut
dapat dipandang sebagai sinyal waktu diskret 𝑥[𝑛] (di mana 𝑥 𝑛 =
𝑥𝑎 𝑛𝑇 ), maka transformasi Fouriernya adalah
𝑋(𝛺) =
𝑛=−∞
∞
𝑥 𝑛 𝑒−𝑗𝛺𝑛
Jika dipandang sebagai sinyal waktu kontinu 𝑥𝑠(𝑡) (di mana 𝑥𝑠 𝑡 =
𝑥𝑎(𝑡) σ𝑛=−∞
∞ 𝛿 𝑡 − 𝑛𝑇 )., maka transformasi Fouriernya
𝑋𝑠 𝜔 =
1
𝑇
𝑟=−∞
∞
𝑋𝑎 𝜔 + 𝑟𝜔𝑠 atau 𝑋𝑠(𝜔) =
𝑛=−∞
∞
𝑥𝑎 𝑛𝑇 𝑒−𝑗𝜔𝑛𝑇
Transformasi Fourier
Waktu Diskret
4. Sifat Trans. Fourier
5. Respons Frekuensi
1. Deret Fourier
2. Sifat Deret Fourier
3. Transformasi Fourier
6. Respons Sistem dengan
Input Periodik
7. Transf. Fourier Sinyal
Kontinu Tersampel](https://image.slidesharecdn.com/6transformasifourierwaktudiskret-230924123253-dae9d9e8/85/6-Transformasi-Fourier-Waktu-Diskret-pdf-32-320.jpg)