Downloaded 25 times
![Digital Signal Detection
r r r
Recall: r = si + n
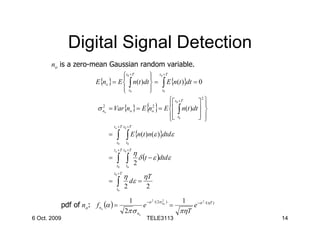
For AWGN, the noise {nk} components are uncorrelated Gaussian
variables which are statistically independent
E[nk ] = 0 (zero mean) , E[rk ] = E[sik + nk ] = sik
η η
Variance σ n = E[n 2 ] − (E[n]) = → σ r2 = σ n =
2 2 2
2 2
Thus {rk} are statistically independent Gaussian variables
r r N
f(r | si ) = Π f(rk | sik ) where N is number of base vectors
k =1 1 2 2
/( 2σ n )
and f(rk | sik ) = e −( rk − sik )
2π σ n
1 − ( rk − sik ) 2 / η
= e
πη
Take natural logarithm on both sides, gives
r r −N 1 N
ln(πη ) − ∑ (rk − sik )
2
ln f(r | si ) =
6 Oct. 2009 2
TELE3113 η k =1 6](https://image.slidesharecdn.com/tele3113wk11tue-110604234832-phpapp02/85/Tele3113-wk11tue-6-320.jpg)
![Digital Signal Detection
r
For a signal symbol set: {si } for i = 1,...M
Detection error probability is
M
r r
Pe = ∑ P[erroneous detection|si sent ]P[ si ]
i =1
r r
M M s k − si r
≤ ∑∑ Q P[ si ]
i =1 i ≠ k 2η
k =1
r
If all signal symbols are equally probable, i.e. P[ si ] = 1 / M
M
r r
Pe = ∑ P[erroneous detection|si sent ]P[ si ]
i =1
r r
1 M M s k − si
≤ ∑∑ Q 2η
M i =1 i ≠ k
k =1
6 Oct. 2009 TELE3113 10](https://image.slidesharecdn.com/tele3113wk11tue-110604234832-phpapp02/85/Tele3113-wk11tue-10-320.jpg)
![Digital Signal Detection
Calculation of error probabilities:
(
(a) Antipodal signaling: s1 = + E ,0 ; s2 = − E ,0) ( )
Pe = P ( s 2 is detected | s1 ) P ( s1 ) + P ( s1 is detected | s 2 ) P ( s 2 )
2 E
≤Q P ( s1 ) + Q 2 E P ( s 2 )
2η 2η
s2 s1
2E
= Q [P ( s1 ) + P ( s 2 )]
η − E + E
2E
= Q
η
signal symbol energy=E
Example: for NRZ signaling which takes amplitude either +A or 0. For bit
interval Tb, the energy per bit Eb=A2Tb.
A2T
Pe = Q = Q Eb
η η
6 Oct. 2009 TELE3113
11](https://image.slidesharecdn.com/tele3113wk11tue-110604234832-phpapp02/85/Tele3113-wk11tue-11-320.jpg)
![Digital Signal Detection
(
(b) Orthogonal signaling: s1 = + E ,0 ; s2 = 0,+ E ) ( )
Pe = P( s 2 is detected | s1 ) P( s1 ) + P( s1 is detected | s 2 ) P ( s 2 ) + E s2
2E
≤ Q P( s1 ) + Q 2 E P( s 2 ) s1
2η 2η
+ E
E E
= Q
[P(s1 ) + P( s 2 )] = Q
η
η
(c) Square signaling:
s1 = + ( ) ( ) (
E ,− E ; s2 = + E ,+ E ; s3 = − E ,+ E ; s4 = − E ,− E) ( )
4
Pe = ∑ P ( si is not detected | si ) P ( si ) s3 + E s2
i =1
2 E
4
≤ ∑ P ( si )Q + Q 2 2 E + Q 2 E
2η 2η 2η
i =1
− E + E
2E E s4 − E s1
= 2Q + Q 2
η
6 Oct. 2009 η TELE3113 12](https://image.slidesharecdn.com/tele3113wk11tue-110604234832-phpapp02/85/Tele3113-wk11tue-12-320.jpg)
![Digital Signal Detection
Integrate-and-Dump detector
r(t)=si(t)+n(t) s (t ) = + A 0≤t ≤T for 1
si (t ) = 1
s2 (t ) = − A 0≤t ≤T for 0
t 0 +T
a1 (t ) + no for 1
Output of the integrator: z (t ) = ∫ [si (t ) + n(t )]dt =
t 0 +T
t0 a2 (t ) + no for 0
where a1 = ∫ Adt = AT
t0
t 0 +T
a2 = ∫ (− A)dt = − AT
t0
t 0 +T
no = ∫ n(t )dt
t0
6 Oct. 2009 TELE3113 13](https://image.slidesharecdn.com/tele3113wk11tue-110604234832-phpapp02/85/Tele3113-wk11tue-13-320.jpg)
![Digital Signal Detection
s1 (t ) = + A 0≤t ≤T for 1
As si (t ) =
s 0 (t ) = − A 0≤t ≤T for 0 s0 s1
We choose the decision threshold to be 0. 0
− AT + AT
Two cases of detection error:
(a) +A is transmitted but (AT+no)<0 no<-AT
(b) -A is transmitted but (-AT+no)>0 no>+AT
Error probability:
Pe = P (no < − AT | A) P ( A) + P (no > AT | A) P (− A)
− AT 2 ∞ 2
e −α /(ηT )
e −α /(ηT )
= P ( A)
−∞
∫ πηT
dα + P (− A) ∫
AT πηT
dα
∞ 2
e −α /(ηT )
2 A2T
dα [P( A) + P (− A)]
∞ 2
e −u / 2
= ∫ πηT
Thus, Pe = Q
Q Q(x ) = ∫ du
AT
η x 2π
∞ 2
e −u / 2 2α 2 Eb
= ∫
T
du Qu =
2π ηT = Q
η
Q Eb = ∫ A2 dt
2 A2T η
0
6 Oct. 2009 TELE3113 15](https://image.slidesharecdn.com/tele3113wk11tue-110604234832-phpapp02/85/Tele3113-wk11tue-15-320.jpg)

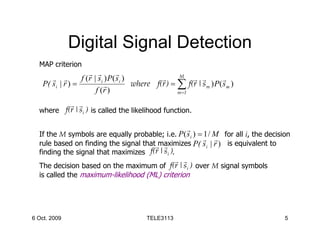
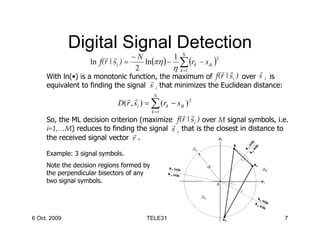
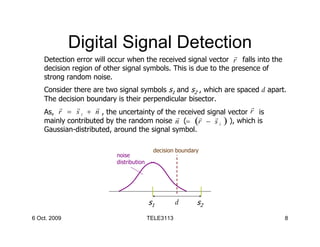
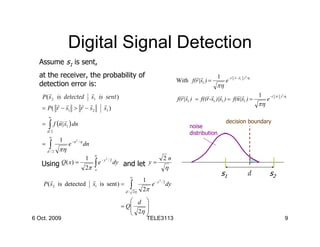
1) The document describes digital signal detection techniques at the receiver of a digital communication system. 2) It discusses the maximum a posteriori probability (MAP) and maximum likelihood (ML) detection criteria. The ML criterion reduces to choosing the signal that minimizes the Euclidean distance between the received signal vector and possible transmitted signals. 3) Detection errors occur when the received signal, distorted by noise, falls inside the decision region of another signal. The probability of error depends on the noise distribution around the actual transmitted signal.





















![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)

![Digital Signal Processing[ECEG-3171]-Ch1_L05](https://cdn.slidesharecdn.com/ss_thumbnails/dspl5ch2-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)
![Digital Signal Processing[ECEG-3171]-Ch1_L04](https://cdn.slidesharecdn.com/ss_thumbnails/dspl4-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)
![Digital Signal Processing[ECEG-3171]-Ch1_L06](https://cdn.slidesharecdn.com/ss_thumbnails/dspl6ch2-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)

















































































