Downloaded 71 times






![Hence Ackermann’s formula yields
K = [4 1]
To achieve a zero steady-state error for a unit step, the system needs to meet the constraint
C(−A + BK)−1
BF = 1
that is, F = 4.
Figure 6 depicts the closed-loop system with state feedback controller. The relative sim-
ulation model is shown in Figure 7.
2
+
+
d
y
-2
u
+
+
.
2x 2x
.
1x
∫∫
K1
K2
F
r +
-
-
Figure 6: The state-space representation of state feedback control system
2
s+2
T ransfer Fcn
t
T o Workspace1
y
T o Workspace
Step1
Step
Scope
s
1
Integrator
K2
Gain2
K1
Gain1
F
Gain
Clock
Figure 7: The simulation model of the closed-loop system
8](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-8-320.jpg)
![When a unit step is applied in the input r(t) and no disturbance is added, the output
y(t) is plotted in Figure 8. When a unit step is also applied as a disturbance at the same
time, the output y(t) is plotted in Figure 9.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time(sec)
Outputy(t)
Figure 8: The step response of the closed-loop system without disturbance
To prevent the overshoot in the step response of a closed-loop system, we can specify
the damping ratio to be ξ > 1 by placing two closed-loop poles at −5 and −6, and the
corresponding characteristic equation of closed-loop system is expressed as
φf (s) = (s + 5)(s + 6) = s2
+ 11s + 30
Hence Ackermann’s formula yields
K = [15 4.5]
Given that the steady-state error for a unit step is zero, we can obtain F = 15. When
a unit step is applied in the input r(t) and no disturbance is added, the output y(t) is
9](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-9-320.jpg)


![+
+
+
+
+
+ +-
A
A
B
B
C
C
L
u
y
xˆ
x
xˆ
x
yˆ
∫
∫
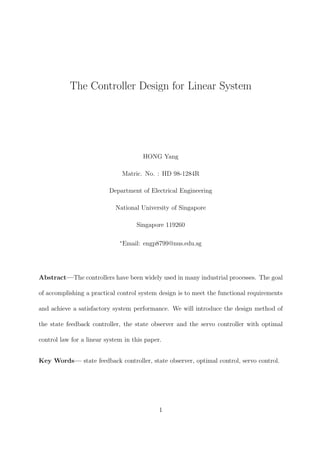
Figure 12: A closed-loop estimator (Luenberger Observer)
Consider an estimator of x(t) of the form:
˙ˆx = Aˆx + Bu(t) + L[y − Cˆx]
Here ˆx(t) denotes the estimate of x(t). Let the estimation error be denoted by ˜x so that
˜x = x − ˆx. It then readily leads to
˙˜x = (A − LC)˜x
with ˜x(0) = x(0) − ˆx(0).
If we choose L such that (A − LC) = A1 is stable, we have
˙˜x = (A − LC)˜x = A1 ˜x
˜x(t) = eA1t
˜x(0)
Clearly ˜x(t) −→ 0 as t −→ ∞. Thus the estimator output ˆx(t) will track x(t) asymp-
totically - this observer is called an asymptotic observer. In this paper, we use the pole
placement algorithms to adjust the rate of convergence of ˆx(t) to x(t). In practice, the
poles of the observer are usually chosen two or five times faster than the system response.
12](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-12-320.jpg)
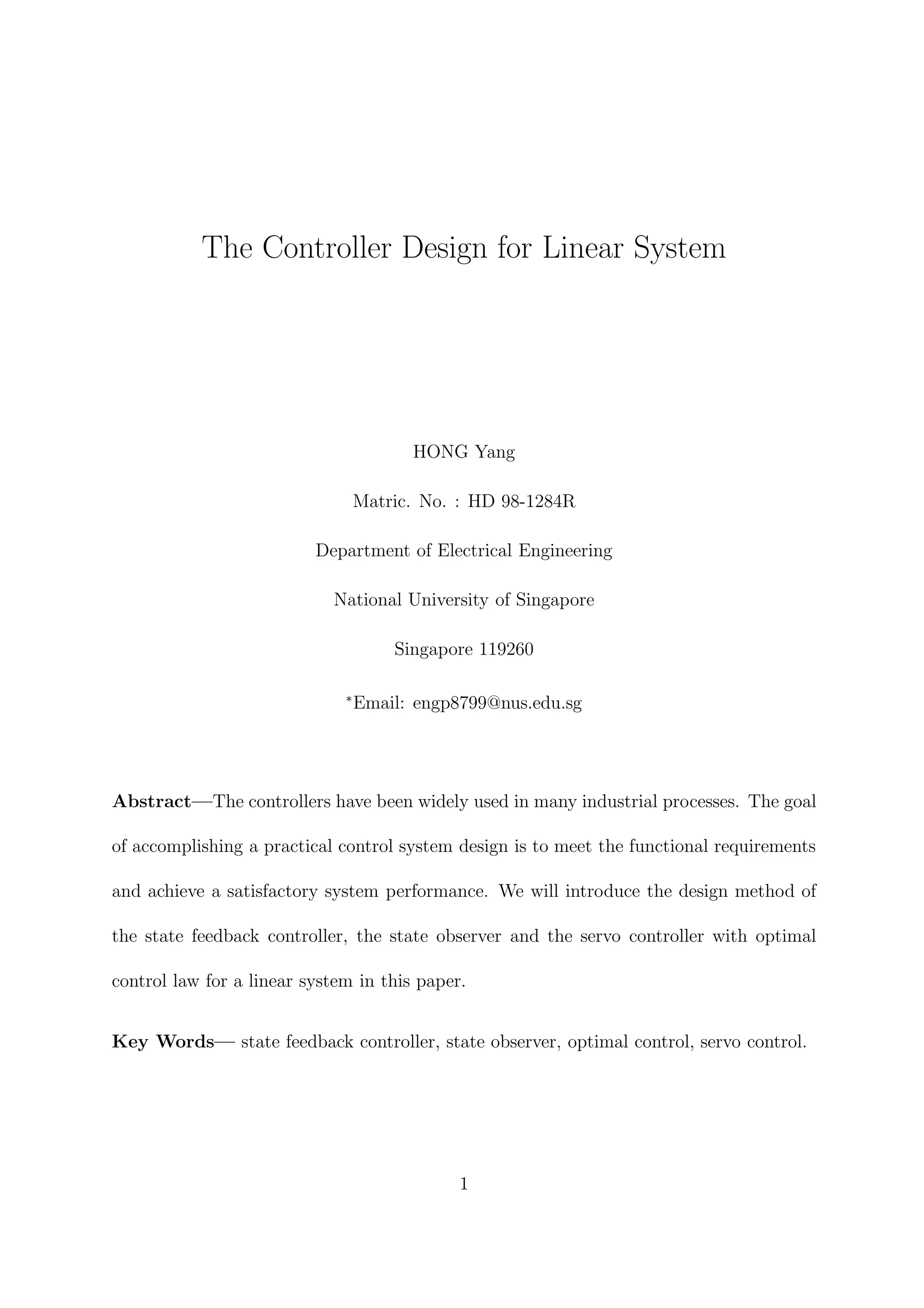
![Suppose that we obtain the feedback gains of the controller with linear state feedback
under the assumption that all the state variables are available. In the real-world im-
plementation of the control policy, only the estimates ˜x(t) obtained using a Luenberger
observer is fed back. Figure 13 depicts a schematic of the observer/controller strategy,
where the overall system can be described as
˙x = Ax + Bu
˙ˆx = Aˆx + Bu + L[y − Cˆx]
y = Cx
u = r − Kˆx
It is convenient to write these equations in terms of x and ˜x, so that we get
+
+
+
+
+
++
-
A
A
B
B
C
C
L
x
∫
u
K
yˆ xˆ xˆ
∫
-
Figure 13: Schematic of the observer/controller structure
˙x
˙˜x
=
A − BK BK
0 A − LC
x
˜x
+
B
0
r
y = Cx (9)
13](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-13-320.jpg)
![This allows us to design the state observer for the system given in (4) by use of Equation
(9). The system given in (4) has the observability matrix
C
CA
=
1 0
0 1
with full rank, so the system is observable.
We use the control law specified in (6). From the above section, it is easily checked that
for F = 4 and K = [4 1], the system has the unit ’DC gain’ for the closed loop, while
the closed-loop poles are located at −2 ± j2.
If ˆx is generated via an observer, in order to place the observer poles at (−6, −6) (three
times as the closed-loop poles), the characteristic equation of observer becomes
det(sI − A + LC) = det(
s −1
0 s + 2
+
l1 0
l2 0
) = det(
s + l1 −1
l2 s + 2
)
= s2
+ (l1 + 2)s + 2l1 + l2 = (s + 6)2
from which L = [10 16]T
can be derived.
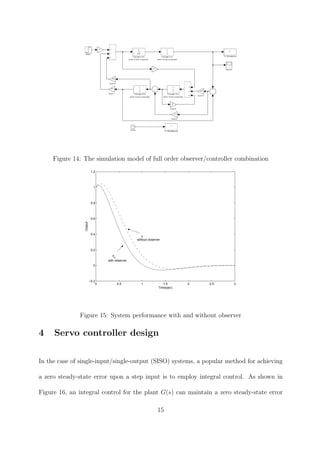
Figure 14 illustrates the simulation model. Given that the input r(t) is zero and initial
condition is x1(0) = 1, x2(0) = 1, ˆx1(0) and ˆx2(0), we can obtain the output y(t) (dashed
curve) if true state feedback is used; similarly we can get the output yo(t) (solid curve) if
the observer is used. Figure 15 provides the performance comparison of both scenarios.
14](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-14-320.jpg)

![The plant to be considered is
˙x = Ax + Bu + Ed
y = Cx (10)
where the input u is an m-vector, the state x is an n-vector, the controller vector y is a
m-vector and disturbance d is a q-vector. The objective of the servo control is to make y
follow the constant reference signal r in the presence of the constant disturbance d and
to stabilize the closed loop.
Let the models of the disturbance and reference signals be
˙xd = 0, d = xd,
˙xr = 0, r = xr.
and define the error e as e = y − r.
In presence of the constant reference signal and the constant disturbance (i.e., ˙d = 0 and
˙r = 0), the derivative of (10) gives
¨x = A ˙x + B ˙u
˙e = C ˙x (11)
which constitutes an augmented system with a matrix
¨x
˙e
=
A 0
C 0
˙x
e
+
B
0
˙u (12)
When e is taken as the output of this system, the output equation becomes
e = [0 1]
˙x
e
17](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-17-320.jpg)
![The control law to stabilize (12) is given by
˙u = −K1 ˙x − K2e ,
and u is given by
u(t) = −K1x − K2
t
0
e dτ + constant.
When the constant term is taken as zero, the control law is
u(t) = −K1x − K2
t
0
(y − r) dτ ,
One can see that integral control is applied in the control system, as shown in Figure 17,
The determination of K1 and K2 can be done by using optimal control for the criterion
function
J =
∞
0
( e 2
Q + ˙u 2
)dt (13)
which yields
(K1, K2) = −R−1
(BT
, 0T
)P (14)
where P is the positive definite solution of
A 0
C 0
T
P + P
A 0
C 0
+
0
I
Q[0 I] − P
B
0
R−1
[BT
0T
]P = 0 (15)
Now we consider the system given in (4) and we specify the initial condition x(0) = 0.
With e = y − r and ˙e = C ˙x, the augmented system is
¨x
˙e
=
0 1 0
0 −2 0
1 0 0
˙x
e
+
0
2
0
˙u
18](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-18-320.jpg)

![then
P =
2.5899 0.9175 1.6838
0.9175 0.3419 0.5000
1.6838 0.5000 1.8351
.
According to the equation (14), we will get
[K1, K2] = [1.8351 0.6838 1.0000]
which yields
˙u = −[1.8351 0.6838] ˙x − e
that is
u = −[1.8351 0.6838]x −
t
0
(y − r)dτ
The simulation model is depicted in Figure 18.
K2
s
T ransfer Fcn1
2
s+2
T ransfer Fcn
t
T o Workspa ce 1
y
T o Workspa ce
Step
Sco pe
K12
Gain2
K11
Gain1
Disturb ance
Clock
s
1
Figure 18: The simulation model of the system with integral control and optimal control
When a unit step input is applied and there is no disturbance, the output y(t) is shown in
Figure 19; When the input u(t) is zero and a unit-step signal is applied as a disturbance,
20](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-20-320.jpg)




![References
[1] K. Ogata, Modern Control Engineering, 3rd Edition, Prentice Hall, 1996.
[2] C.T. Chen, Linear System Theory and Design, 3rd Edition, Oxford University Press,
USA, 1998.
[3] T. Kailath, Linear Systems, Prentice-Hall, 1979.
[4] Q.G. Wang, Linear Systems, Lecture Notes, National University of Singapore, 1999.
Citation of this paper
Y. Hong, “The Controller Design For Linear System: A State Space Approach”, Technical
Report, National University of Singapore, November 1999.
Use case: Internet traffic control
Y. Hong and O.W.W. Yang, “Self-Tuning Optimal PI Rate Controller for End-to-End
Congestion With LQR Approach,” Proceedings of 20th International Teletraffic Congress
(ITC-20), Ottawa, Canada, June 2007, pp.829-840. Available on ResearchGate.
Discussions on control system design by ResearchGate members
“What are trends in control theory and its applications in physical systems (from a re-
search point of view)?”
https://www.researchgate.net/post/What are trends in control theory and its applications
in physical systems from a research point of view2
25](https://image.slidesharecdn.com/controllerdesignforlinearsystemstatespaceapproach-160709210403/85/The-Controller-Design-For-Linear-System-A-State-Space-Approach-25-320.jpg)

This document discusses the design of controllers for linear systems using a state-space approach, focusing on state feedback controllers, state observers, and servo controllers with optimal control laws. It outlines the objectives of controller design, the analysis of the systems involved, techniques for achieving stability through pole placement, and the application of Luenberger observers for estimating system states. Key findings include the ability to achieve zero steady-state error and minimal overshoot in system responses.