Downloaded 74 times







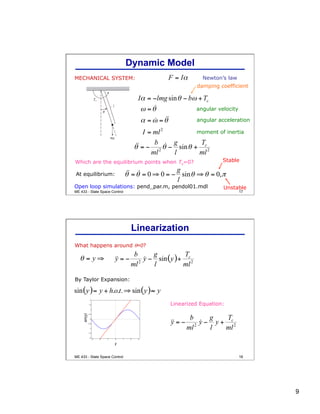
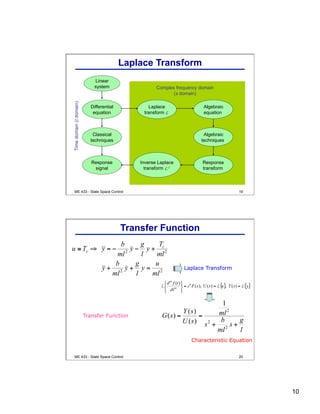





This document provides an overview of the ME 433 - State Space Control course. It introduces the course topics which include state-space modeling, observability and controllability, linear state feedback control, linear quadratic regulator, and Kalman filtering. It also lists relevant textbooks and describes various types of control problems including nonlinear, robust, adaptive, and distributed parameter systems control.