Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
HanpenRobot
PDF, PPTX
1,559 views
行列による空間の直和分解
行列による空間の直和分解を解説します.行列による空間の直和分解を利用することで,ジョルダン標準形が計算できます.
Education
◦
Related topics:
Linear Algebra Concepts
•
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 14
2
/ 14
3
/ 14
4
/ 14
Most read
5
/ 14
6
/ 14
7
/ 14
8
/ 14
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
More Related Content
PDF
表現論 ゼミ資料
by
HanpenRobot
PPTX
超複素数
by
Horiguchi Shuhei
PDF
微分演算子と多項式の剰余環の関係 2016 october 12
by
HanpenRobot
PDF
Noether環上の有限生成加群の有限表示
by
HanpenRobot
PDF
Wronskianと一次独立性
by
HanpenRobot
PDF
代数幾何memo_2020March30_1337
by
HanpenRobot
PDF
Fourier analysis on symmetric group
by
HanpenRobot
PDF
武井研ゼミ M1 第3回目
by
HanpenRobot
表現論 ゼミ資料
by
HanpenRobot
超複素数
by
Horiguchi Shuhei
微分演算子と多項式の剰余環の関係 2016 october 12
by
HanpenRobot
Noether環上の有限生成加群の有限表示
by
HanpenRobot
Wronskianと一次独立性
by
HanpenRobot
代数幾何memo_2020March30_1337
by
HanpenRobot
Fourier analysis on symmetric group
by
HanpenRobot
武井研ゼミ M1 第3回目
by
HanpenRobot
What's hot
PDF
流体シミュレータの製作
by
Fumiya Watanabe
PDF
場の量子論
by
M M
PDF
確率微分方程式の基礎
by
HanpenRobot
PDF
人生を豊かにする線形代数学
by
Fumiya Watanabe
PPTX
【解説】 一般逆行列
by
Kenjiro Sugimoto
PDF
集合の上極限,下極限
by
HanpenRobot
流体シミュレータの製作
by
Fumiya Watanabe
場の量子論
by
M M
確率微分方程式の基礎
by
HanpenRobot
人生を豊かにする線形代数学
by
Fumiya Watanabe
【解説】 一般逆行列
by
Kenjiro Sugimoto
集合の上極限,下極限
by
HanpenRobot
Viewers also liked
PDF
VisualSFMとMeshLabとCloudCompareによるドローン撮影画像を用いたデジタル地図作成
by
Hiroshi Yamaguchi
PDF
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
PDF
asm.jsとWebAssemblyって実際なんなの?
by
Yosuke Onoue
PPTX
Cesiumを用いた3次元リアルタイムデータの可視化について
by
Ryousuke Wayama
PDF
emscriptenでC/C++プログラムをwebブラウザから使うまでの難所攻略
by
祐司 伊藤
PPTX
主成分分析(Pca)
by
Shushi Namba
PPTX
Partial least squares回帰と画像認識への応用
by
Shohei Kumagai
PDF
20110606PRMU 2D-3Dマッチングを用いた3次元点群の時間的な剛体変化検出
by
Toru Tamaki
PDF
行列およびテンソルデータに対する機械学習(数理助教の会 2011/11/28)
by
ryotat
PDF
PCL
by
Masafumi Noda
PDF
最適化超入門
by
Takami Sato
PPTX
点群処理
by
Tomohiro Takata
PDF
10分でわかる主成分分析(PCA)
by
Takanori Ogata
PPTX
2014 3 13(テンソル分解の基礎)
by
Tatsuya Yokota
PDF
フリーソフトウェアを通じた多変量解析講習
by
h_yama2396
PDF
信号処理・画像処理における凸最適化
by
Shunsuke Ono
PDF
Rexhep qosja te vertetat e vonuara
by
Libra Islame
PDF
Cvim chapter4-5-ken_hide
by
kenhide
PDF
C++11やemscriptenと付き合って1年間の振り返り
by
paosidufgythrj
VisualSFMとMeshLabとCloudCompareによるドローン撮影画像を用いたデジタル地図作成
by
Hiroshi Yamaguchi
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
asm.jsとWebAssemblyって実際なんなの?
by
Yosuke Onoue
Cesiumを用いた3次元リアルタイムデータの可視化について
by
Ryousuke Wayama
emscriptenでC/C++プログラムをwebブラウザから使うまでの難所攻略
by
祐司 伊藤
主成分分析(Pca)
by
Shushi Namba
Partial least squares回帰と画像認識への応用
by
Shohei Kumagai
20110606PRMU 2D-3Dマッチングを用いた3次元点群の時間的な剛体変化検出
by
Toru Tamaki
行列およびテンソルデータに対する機械学習(数理助教の会 2011/11/28)
by
ryotat
PCL
by
Masafumi Noda
最適化超入門
by
Takami Sato
点群処理
by
Tomohiro Takata
10分でわかる主成分分析(PCA)
by
Takanori Ogata
2014 3 13(テンソル分解の基礎)
by
Tatsuya Yokota
フリーソフトウェアを通じた多変量解析講習
by
h_yama2396
信号処理・画像処理における凸最適化
by
Shunsuke Ono
Rexhep qosja te vertetat e vonuara
by
Libra Islame
Cvim chapter4-5-ken_hide
by
kenhide
C++11やemscriptenと付き合って1年間の振り返り
by
paosidufgythrj
Similar to 行列による空間の直和分解
PDF
線形写像を行列で表現しよう
by
HanpenRobot
PDF
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
PDF
210603 yamamoto
by
RCCSRENKEI
PDF
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
PDF
第8回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
PDF
CMSI計算科学技術特論A (2015) 第10回 行列計算における高速アルゴリズム1
by
Computational Materials Science Initiative
PDF
基底変換行列
by
HanpenRobot
PDF
集合の直積に関するメモ 𝐴×𝐵={(𝑎,𝑏) | 𝑎∈𝐴, 𝑏∈𝐵}, 𝑝_1 ((𝑎,𝑏))=𝑎,𝑝_2 ((𝑎,𝑏))=𝑏
by
HanpenRobot
PDF
数式をnumpyに落としこむコツ
by
Shuyo Nakatani
PDF
内部拘束を持つ3 次元運動の最適計算法と幾何学的モデル選択への応用ViEW2012論文
by
doboncho
PDF
45107
by
psy-pher
PDF
競技プログラミングでの線型方程式系
by
tmaehara
PDF
C03
by
anonymousouj
PDF
Linera lgebra
by
Shin Asakawa
PDF
2021年度秋学期 画像情報処理 第6回 ベクトルと行列について (2021. 10. 29)
by
Akira Asano
PDF
Sized Linear Algebra Package のチュートリアル
by
Akinori Abe
PDF
2021年度秋学期 画像情報処理 第6回 ベクトルと行列について (2021. 10. 29)
by
Akira Asano
PPTX
CG2013 06
by
shiozawa_h
PDF
2021年度秋学期 画像情報処理 第8回 行列の直交変換と基底画像 (2021. 11. 12)
by
Akira Asano
PDF
2022年度秋学期 画像情報処理 第8回 行列の直交変換と基底画像 (2022. 11. 18)
by
Akira Asano
線形写像を行列で表現しよう
by
HanpenRobot
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
210603 yamamoto
by
RCCSRENKEI
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
第8回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
CMSI計算科学技術特論A (2015) 第10回 行列計算における高速アルゴリズム1
by
Computational Materials Science Initiative
基底変換行列
by
HanpenRobot
集合の直積に関するメモ 𝐴×𝐵={(𝑎,𝑏) | 𝑎∈𝐴, 𝑏∈𝐵}, 𝑝_1 ((𝑎,𝑏))=𝑎,𝑝_2 ((𝑎,𝑏))=𝑏
by
HanpenRobot
数式をnumpyに落としこむコツ
by
Shuyo Nakatani
内部拘束を持つ3 次元運動の最適計算法と幾何学的モデル選択への応用ViEW2012論文
by
doboncho
45107
by
psy-pher
競技プログラミングでの線型方程式系
by
tmaehara
C03
by
anonymousouj
Linera lgebra
by
Shin Asakawa
2021年度秋学期 画像情報処理 第6回 ベクトルと行列について (2021. 10. 29)
by
Akira Asano
Sized Linear Algebra Package のチュートリアル
by
Akinori Abe
2021年度秋学期 画像情報処理 第6回 ベクトルと行列について (2021. 10. 29)
by
Akira Asano
CG2013 06
by
shiozawa_h
2021年度秋学期 画像情報処理 第8回 行列の直交変換と基底画像 (2021. 11. 12)
by
Akira Asano
2022年度秋学期 画像情報処理 第8回 行列の直交変換と基底画像 (2022. 11. 18)
by
Akira Asano
More from HanpenRobot
PPTX
Diagonalization matrix
by
HanpenRobot
PDF
圏論メモ_対角関手.pdf 任意の圏𝑪の任意の対象は 圏𝟏からの関手であり、そして対象間の射は自然変換とみなせることの説明
by
HanpenRobot
PDF
Conditional expectation projection 2018 feb 18
by
HanpenRobot
PPTX
Log complex
by
HanpenRobot
PDF
Campbell hasudorff formula
by
HanpenRobot
PDF
構造定数が随伴表現になることの証明
by
HanpenRobot
PDF
位相空間の開集合の成す圏 2016 august 30
by
HanpenRobot
PDF
Duality of laplace transform
by
HanpenRobot
PDF
fermat's little theorem and …
by
HanpenRobot
PDF
微分の表現行列 Representation matrix
by
HanpenRobot
PDF
How to solve recurrence equation
by
HanpenRobot
PDF
Minimize quadratic form
by
HanpenRobot
PDF
正則関数のマクロリーン展開
by
HanpenRobot
PDF
Finite set complex function
by
HanpenRobot
PDF
電子光波Memo
by
HanpenRobot
PDF
置換族の一様分布
by
HanpenRobot
PDF
Conjugate cyclic permutation
by
HanpenRobot
PDF
ベイズ識別 一般化逆行列
by
HanpenRobot
PDF
金利スワップのメモ
by
HanpenRobot
PDF
Fourier transform on real-valued function over symmetric group
by
HanpenRobot
Diagonalization matrix
by
HanpenRobot
圏論メモ_対角関手.pdf 任意の圏𝑪の任意の対象は 圏𝟏からの関手であり、そして対象間の射は自然変換とみなせることの説明
by
HanpenRobot
Conditional expectation projection 2018 feb 18
by
HanpenRobot
Log complex
by
HanpenRobot
Campbell hasudorff formula
by
HanpenRobot
構造定数が随伴表現になることの証明
by
HanpenRobot
位相空間の開集合の成す圏 2016 august 30
by
HanpenRobot
Duality of laplace transform
by
HanpenRobot
fermat's little theorem and …
by
HanpenRobot
微分の表現行列 Representation matrix
by
HanpenRobot
How to solve recurrence equation
by
HanpenRobot
Minimize quadratic form
by
HanpenRobot
正則関数のマクロリーン展開
by
HanpenRobot
Finite set complex function
by
HanpenRobot
電子光波Memo
by
HanpenRobot
置換族の一様分布
by
HanpenRobot
Conjugate cyclic permutation
by
HanpenRobot
ベイズ識別 一般化逆行列
by
HanpenRobot
金利スワップのメモ
by
HanpenRobot
Fourier transform on real-valued function over symmetric group
by
HanpenRobot
行列による空間の直和分解
1.
行列による空間の直和分解 Hanpen Robot
2.
まずは,行列𝔸 = 𝑎11 𝑎12 𝑎21
𝑎22 を考える
3.
次に,行列𝔸を使って, ℝ上の2次元ベクトル空間ℝ2を, ℝ[𝔸]上の加群ℝ 𝔸 𝟐に拡張する!
4.
拡張前 ℝ2 = 𝑥1 𝕖1
+ 𝑥2 𝕖2 𝑥𝑖 ∈ ℝ ただし,𝕖1 = 1 0 ,𝕖2 = 0 1 拡張後 ℝ[𝔸] 𝟐 = 𝒇 𝟏(𝔸)𝕖 𝟏 + 𝒇 𝟐(𝔸)𝕖 𝟐 𝒇𝒊 (𝔸) ∈ ℝ[𝔸]
5.
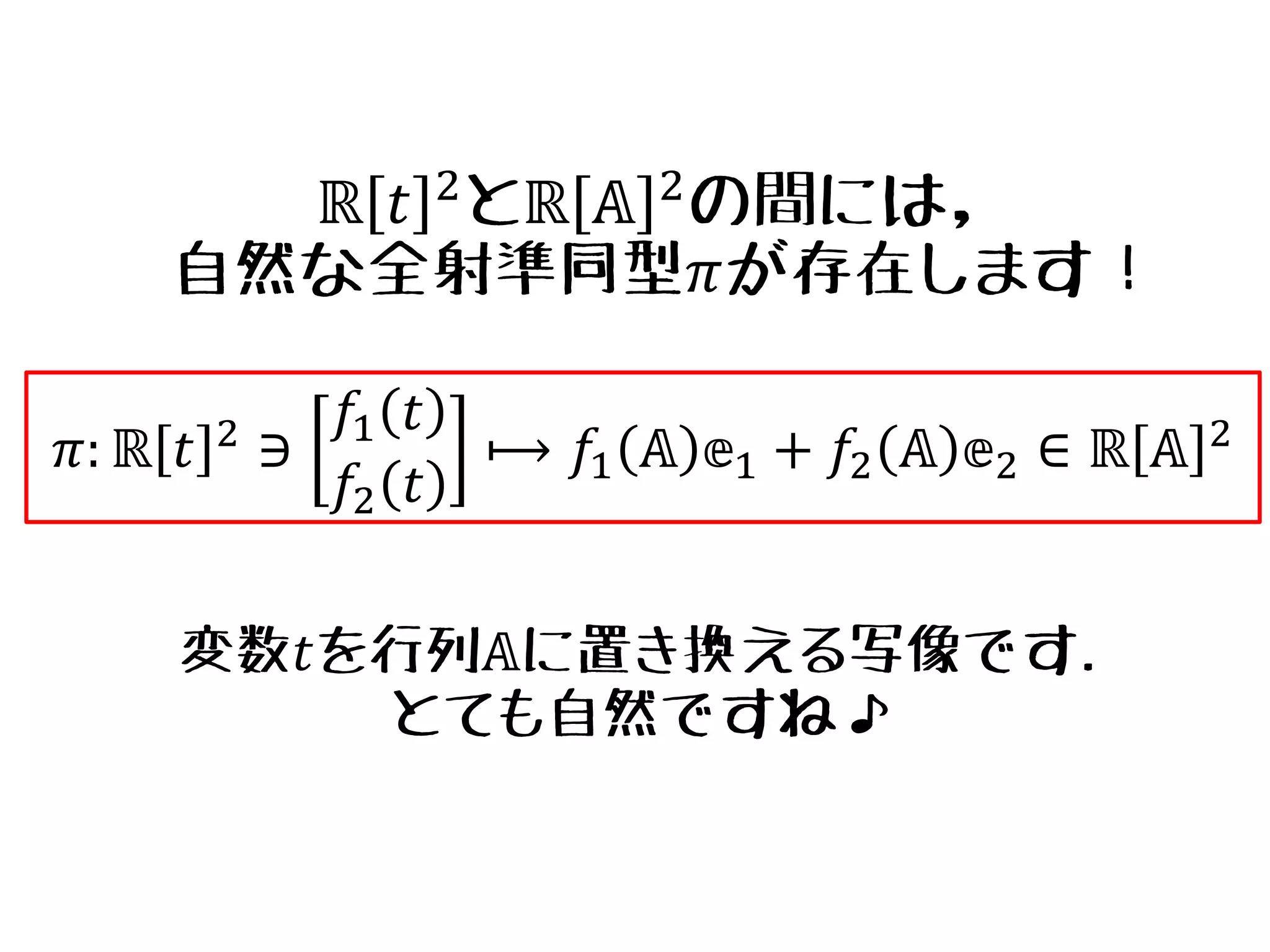
変数𝑡を行列𝔸に置き換える写像です. とても自然ですね♪ 𝜋: ℝ 𝑡
2 ∋ 𝑓1 𝑡 𝑓2 𝑡 ⟼ 𝑓1 𝔸 𝕖1 + 𝑓2 𝔸 𝕖2 ∈ ℝ 𝔸 2 ℝ 𝑡 2 とℝ 𝔸 2 の間には, 自然な全射準同型𝜋が存在します!
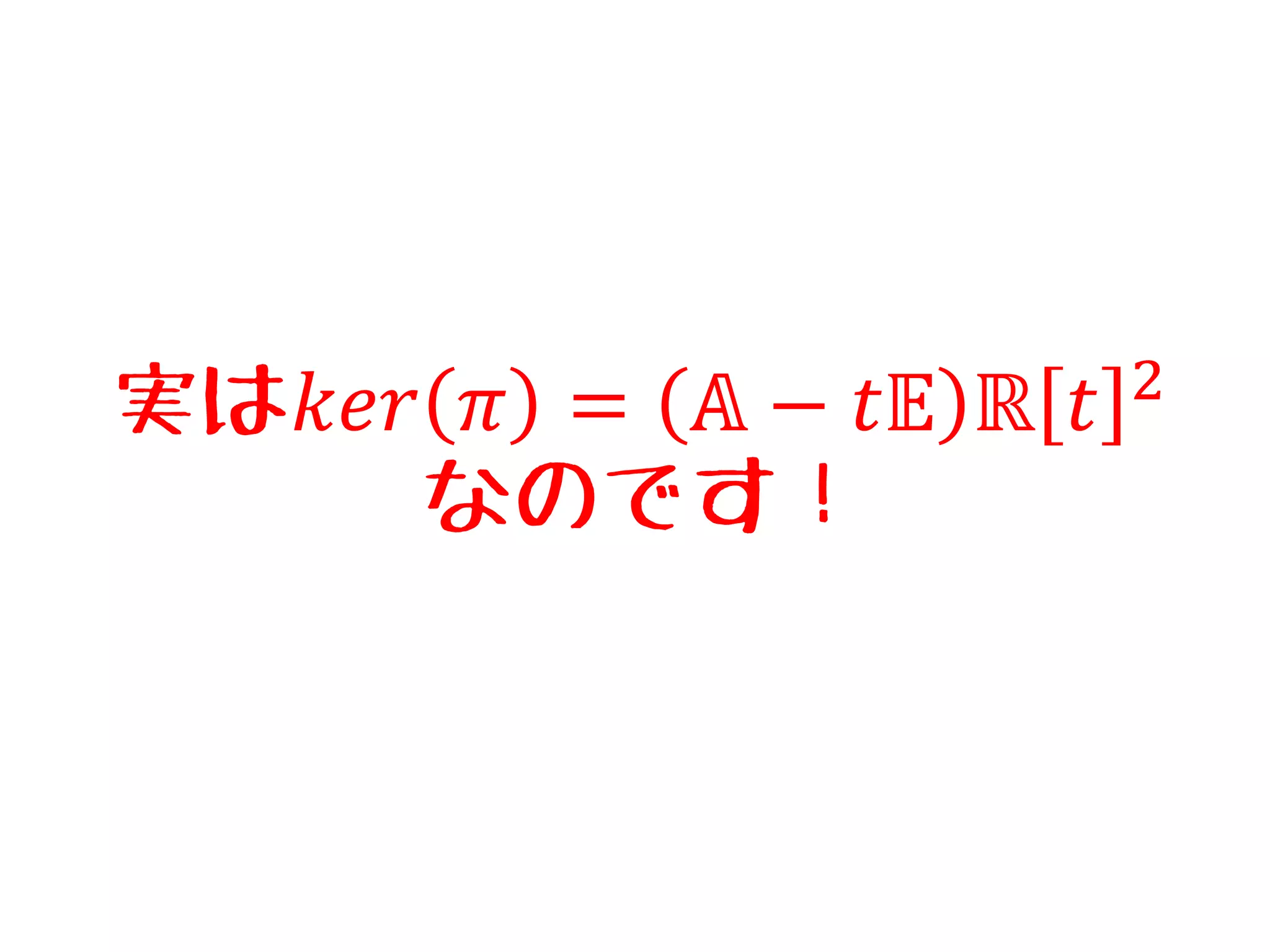
6.
実は𝑘𝑒𝑟 𝜋 =
𝔸 − 𝑡𝔼 ℝ 𝑡 2 なのです!
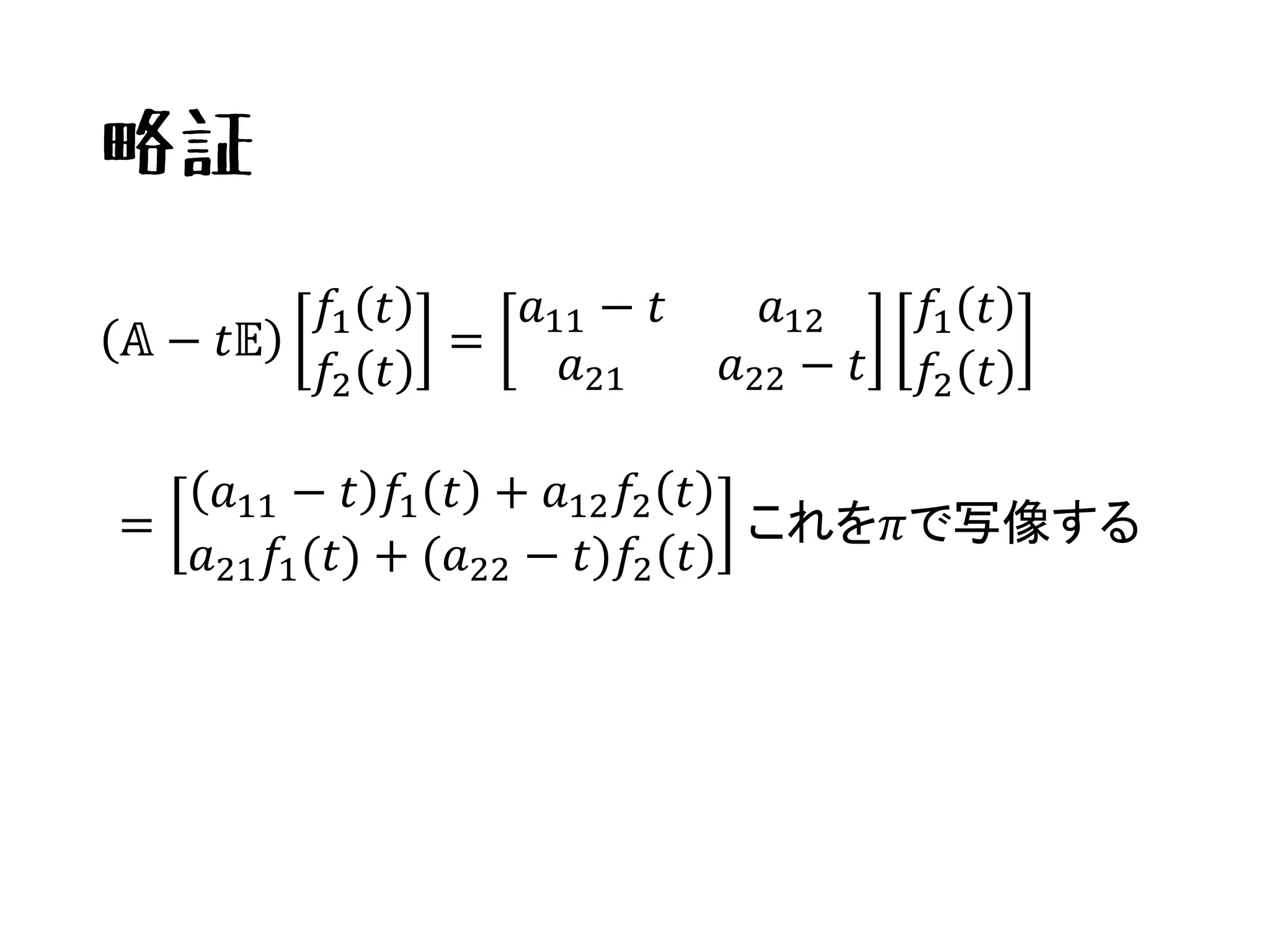
7.
略証 𝔸 − 𝑡𝔼 𝑓1
𝑡 𝑓2 𝑡 = 𝑎11 − 𝑡 𝑎12 𝑎21 𝑎22 − 𝑡 𝑓1 𝑡 𝑓2 𝑡 = 𝑎11 − 𝑡 𝑓1 𝑡 + 𝑎12 𝑓2 𝑡 𝑎21 𝑓1(𝑡) + (𝑎22 − 𝑡)𝑓2 𝑡 これを𝜋で写像する
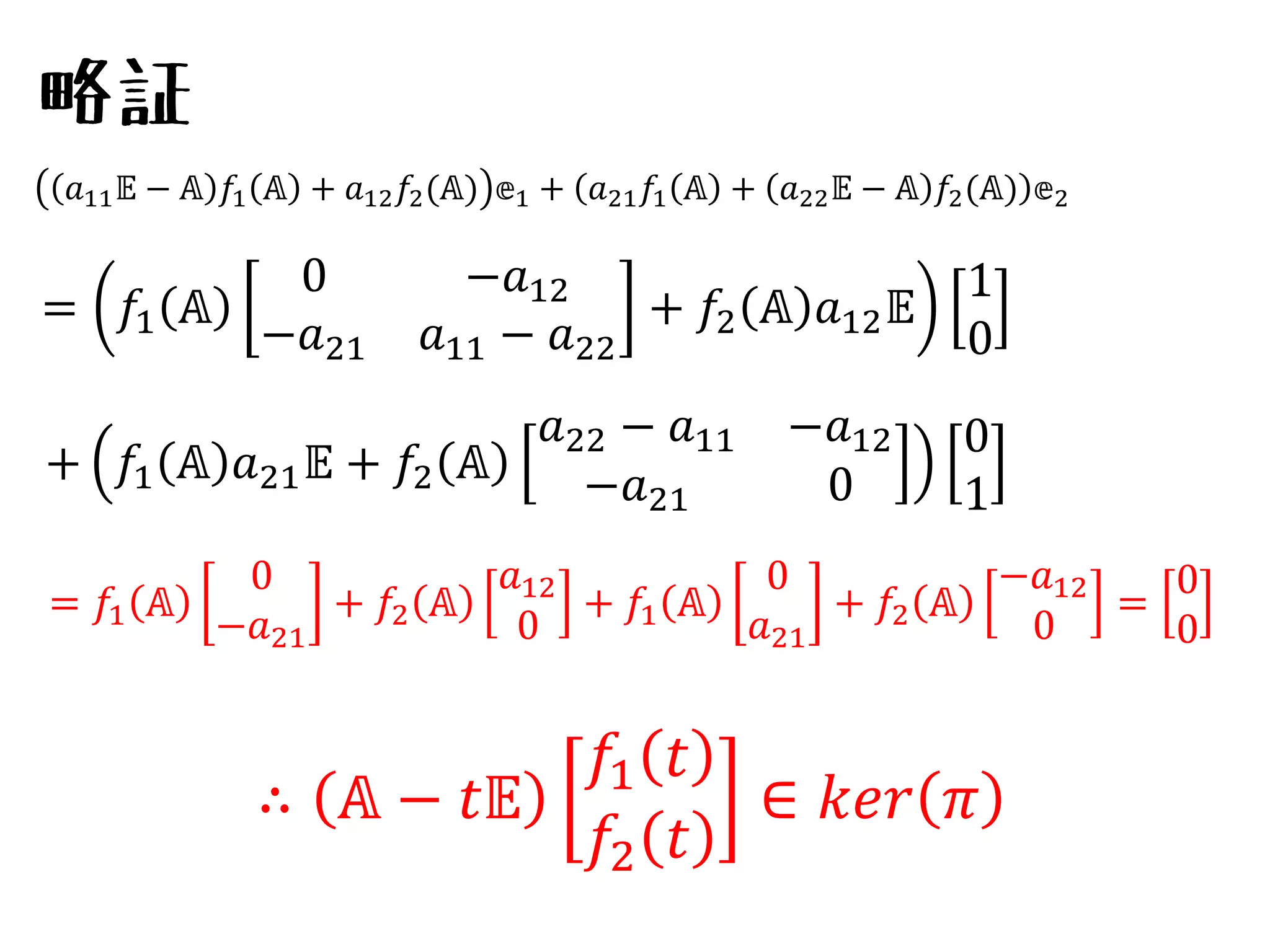
8.
𝑎11 𝔼 −
𝔸 𝑓1 𝔸 + 𝑎12 𝑓2(𝔸) 𝕖1 + 𝑎21 𝑓1 𝔸 + 𝑎22 𝔼 − 𝔸 𝑓2(𝔸) 𝕖2 = 𝑓1 𝔸 0 −𝑎12 −𝑎21 𝑎11 − 𝑎22 + 𝑓2 𝔸 𝑎12 𝔼 1 0 + 𝑓1 𝔸 𝑎21 𝔼 + 𝑓2 𝔸 𝑎22 − 𝑎11 −𝑎12 −𝑎21 0 0 1 = 𝑓1 𝔸 0 −𝑎21 + 𝑓2 𝔸 𝑎12 0 + 𝑓1 𝔸 0 𝑎21 + 𝑓2 𝔸 −𝑎12 0 = 0 0 ∴ 𝔸 − 𝑡𝔼 𝑓1 𝑡 𝑓2 𝑡 ∈ 𝑘𝑒𝑟 𝜋 略証
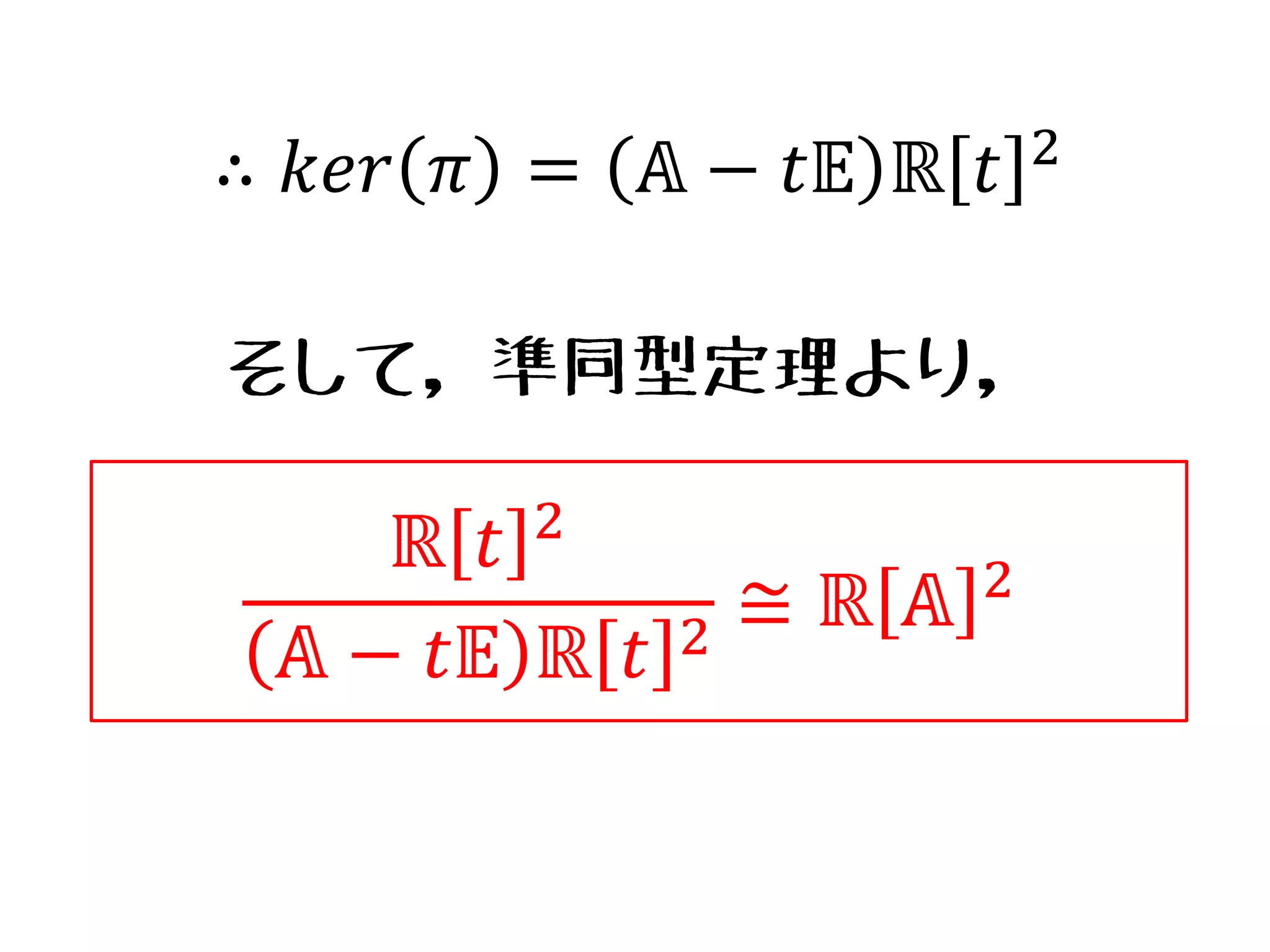
9.
ℝ 𝑡 2 𝔸
− 𝑡𝔼 ℝ 𝑡 2 ≅ ℝ 𝔸 2 ∴ 𝑘𝑒𝑟 𝜋 = 𝔸 − 𝑡𝔼 ℝ 𝑡 2 そして,準同型定理より,
10.
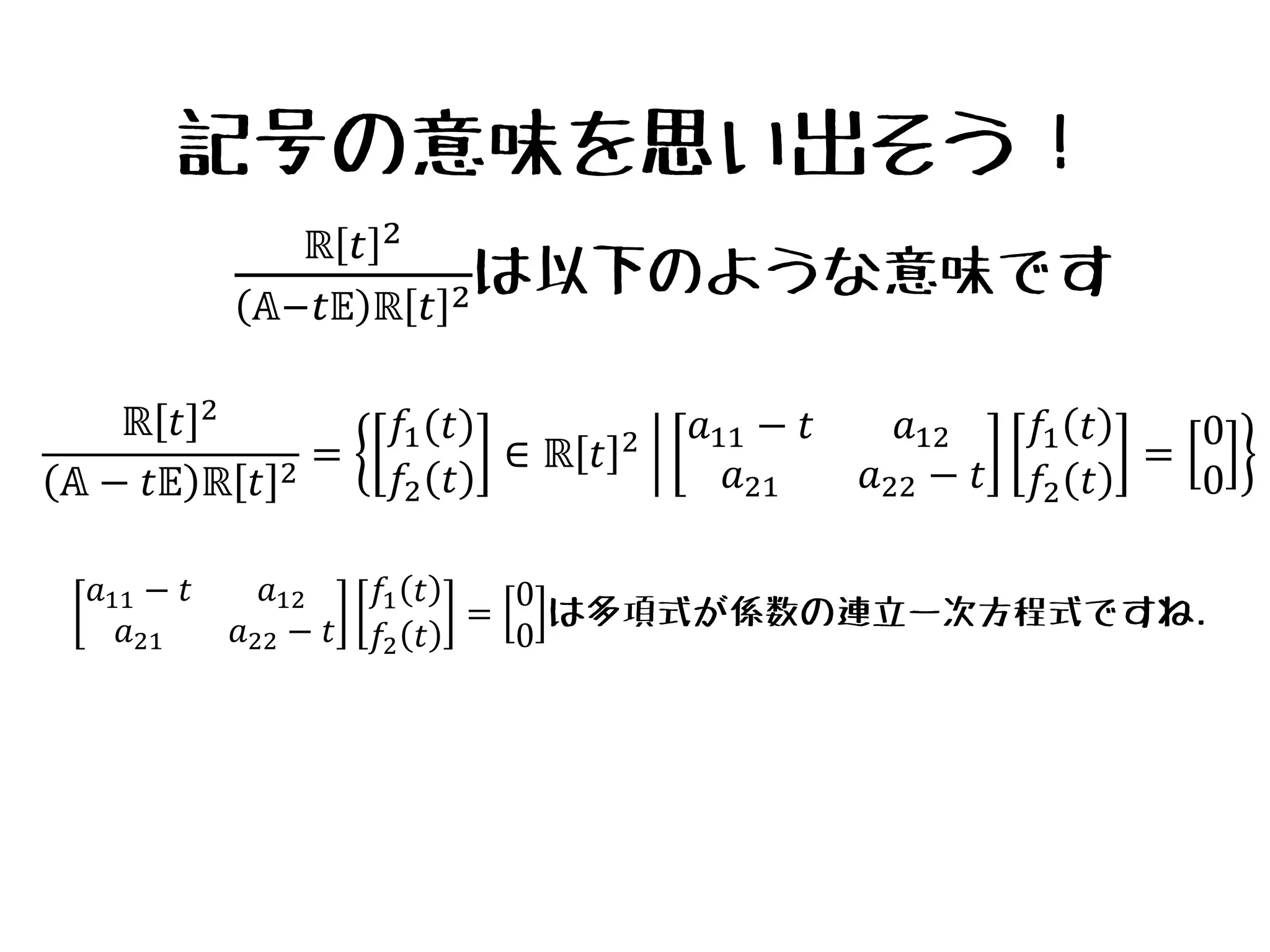
記号の意味を思い出そう! ℝ 𝑡 2 𝔸
− 𝑡𝔼 ℝ 𝑡 2 = 𝑓1(𝑡) 𝑓2 𝑡 ∈ ℝ 𝑡 2 𝑎11 − 𝑡 𝑎12 𝑎21 𝑎22 − 𝑡 𝑓1 𝑡 𝑓2 𝑡 = 0 0 ℝ 𝑡 2 𝔸−𝑡𝔼 ℝ 𝑡 2は以下のような意味です 𝑎11 − 𝑡 𝑎12 𝑎21 𝑎22 − 𝑡 𝑓1 𝑡 𝑓2 𝑡 = 0 0 は多項式が係数の連立一次方程式ですね.
11.
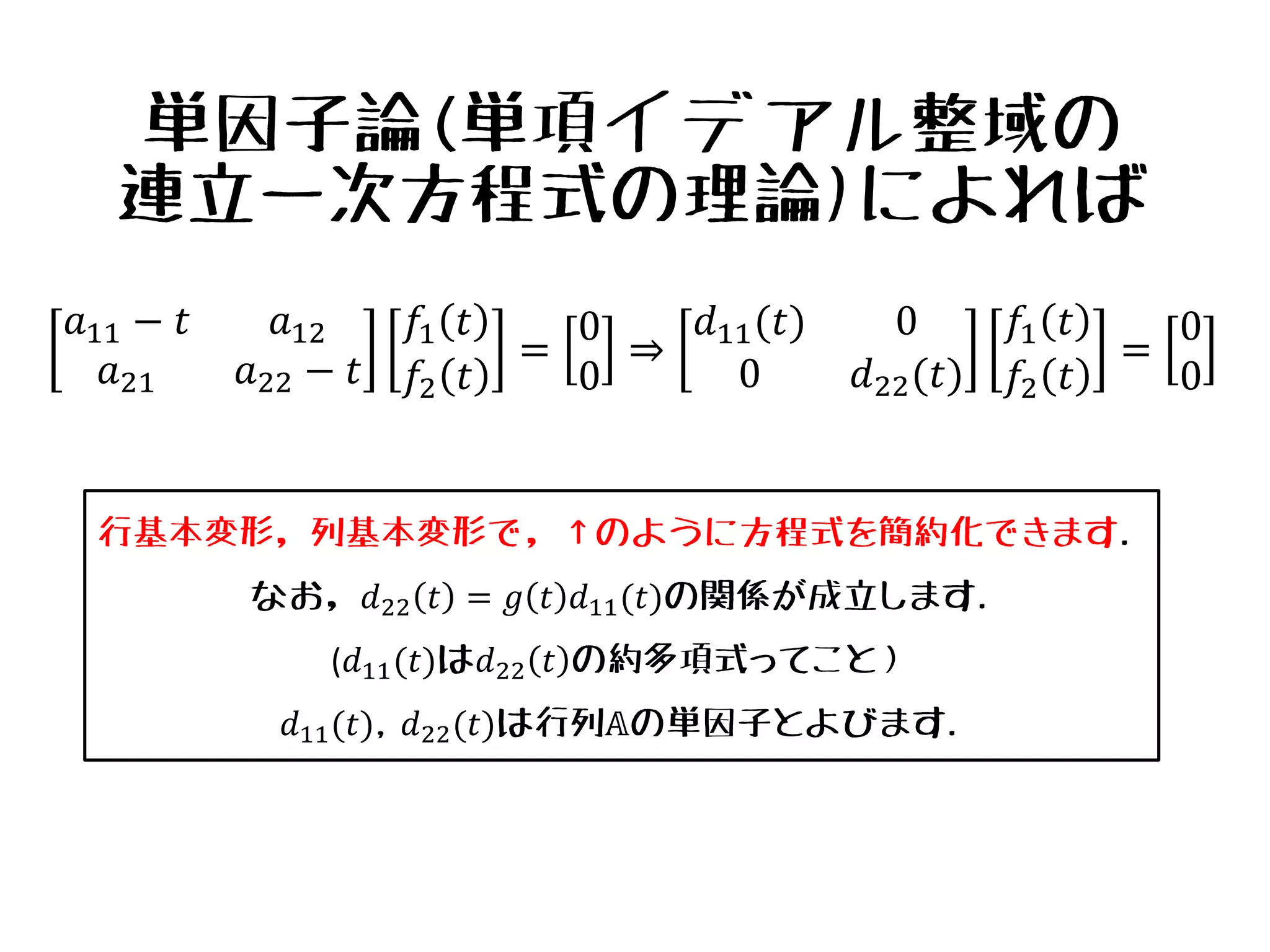
単因子論(単項イデアル整域の 連立一次方程式の理論)によれば 𝑎11 − 𝑡
𝑎12 𝑎21 𝑎22 − 𝑡 𝑓1 𝑡 𝑓2 𝑡 = 0 0 ⇒ 𝑑11(𝑡) 0 0 𝑑22(𝑡) 𝑓1 𝑡 𝑓2 𝑡 = 0 0 行基本変形,列基本変形で,↑のように方程式を簡約化できます. なお,𝑑22 𝑡 = 𝑔 𝑡 𝑑11(𝑡)の関係が成立します. (𝑑11(𝑡)は𝑑22 𝑡 の約多項式ってこと) 𝑑11(𝑡), 𝑑22(𝑡)は行列𝔸の単因子とよびます.
12.
ℝ 𝑡 2 𝔸
− 𝑡𝔼 ℝ 𝑡 2 = 𝑓1(𝑡) 𝑓2 𝑡 ∈ ℝ 𝑡 2 𝑑11(𝑡) 0 0 𝑑22(𝑡) 𝑓1 𝑡 𝑓2 𝑡 = 0 0 = 𝑓1 𝑡 𝑓2 𝑡 ∈ ℝ 𝑡 2 │ 𝑑11(𝑡)𝑓1 𝑡 𝑑22(𝑡)𝑓2 𝑡 = 0 0 = 𝑓1 𝑡 𝑚𝑜𝑑 𝑑11(𝑡) 𝑓2 𝑡 𝑚𝑜𝑑 𝑑22(𝑡) = ℝ 𝑡 𝑑11ℝ[𝑡] ⨁ ℝ 𝑡 𝑑22ℝ[𝑡] ∴ ℝ 𝔸 2 ≅ ℝ 𝑡 2 𝔸 − 𝑡𝔼 ℝ 𝑡 2 = ℝ 𝑡 𝑑11ℝ[𝑡] ⨁ ℝ 𝑡 𝑑22ℝ[𝑡] 行列で空間の直和分解ができた!
13.
行列による空間の直和分解を利用 する事で,行列のジョルダン標準形 が計算できます!
Download

![次に,行列𝔸を使って,
ℝ上の2次元ベクトル空間ℝ2を,
ℝ[𝔸]上の加群ℝ 𝔸 𝟐に拡張する!](https://image.slidesharecdn.com/2-150309224624-conversion-gate01/75/slide-3-2048.jpg)
![拡張前
ℝ2
= 𝑥1 𝕖1 + 𝑥2 𝕖2 𝑥𝑖 ∈ ℝ
ただし,𝕖1 =
1
0
,𝕖2 =
0
1
拡張後
ℝ[𝔸] 𝟐
= 𝒇 𝟏(𝔸)𝕖 𝟏 + 𝒇 𝟐(𝔸)𝕖 𝟐 𝒇𝒊 (𝔸) ∈ ℝ[𝔸]](https://image.slidesharecdn.com/2-150309224624-conversion-gate01/75/slide-4-2048.jpg)
![ℝ 𝑡 2
𝔸 − 𝑡𝔼 ℝ 𝑡 2
=
𝑓1(𝑡)
𝑓2 𝑡
∈ ℝ 𝑡 2 𝑑11(𝑡) 0
0 𝑑22(𝑡)
𝑓1 𝑡
𝑓2 𝑡
=
0
0
=
𝑓1 𝑡
𝑓2 𝑡
∈ ℝ 𝑡 2 │
𝑑11(𝑡)𝑓1 𝑡
𝑑22(𝑡)𝑓2 𝑡
=
0
0
=
𝑓1 𝑡 𝑚𝑜𝑑 𝑑11(𝑡)
𝑓2 𝑡 𝑚𝑜𝑑 𝑑22(𝑡)
=
ℝ 𝑡
𝑑11ℝ[𝑡]
⨁
ℝ 𝑡
𝑑22ℝ[𝑡]
∴ ℝ 𝔸 2
≅
ℝ 𝑡 2
𝔸 − 𝑡𝔼 ℝ 𝑡 2
=
ℝ 𝑡
𝑑11ℝ[𝑡]
⨁
ℝ 𝑡
𝑑22ℝ[𝑡]
行列で空間の直和分解ができた!](https://image.slidesharecdn.com/2-150309224624-conversion-gate01/75/slide-12-2048.jpg)