拘束条件(4次元 p124あたり )
点が超平面と交差すると以下の式が成り立つ
T T
U W =0 W = [W 1 W 2 W 3 W 4 W 5]
T
U = [U1 U 2 U 3 U 4 U5 ]
例:時刻Tを4次元目の値にする
T €
W = [X Y Z T 1] :4次元空間中の点
T €
U = [A B C D E ] :4次元空間中の超平面
€€
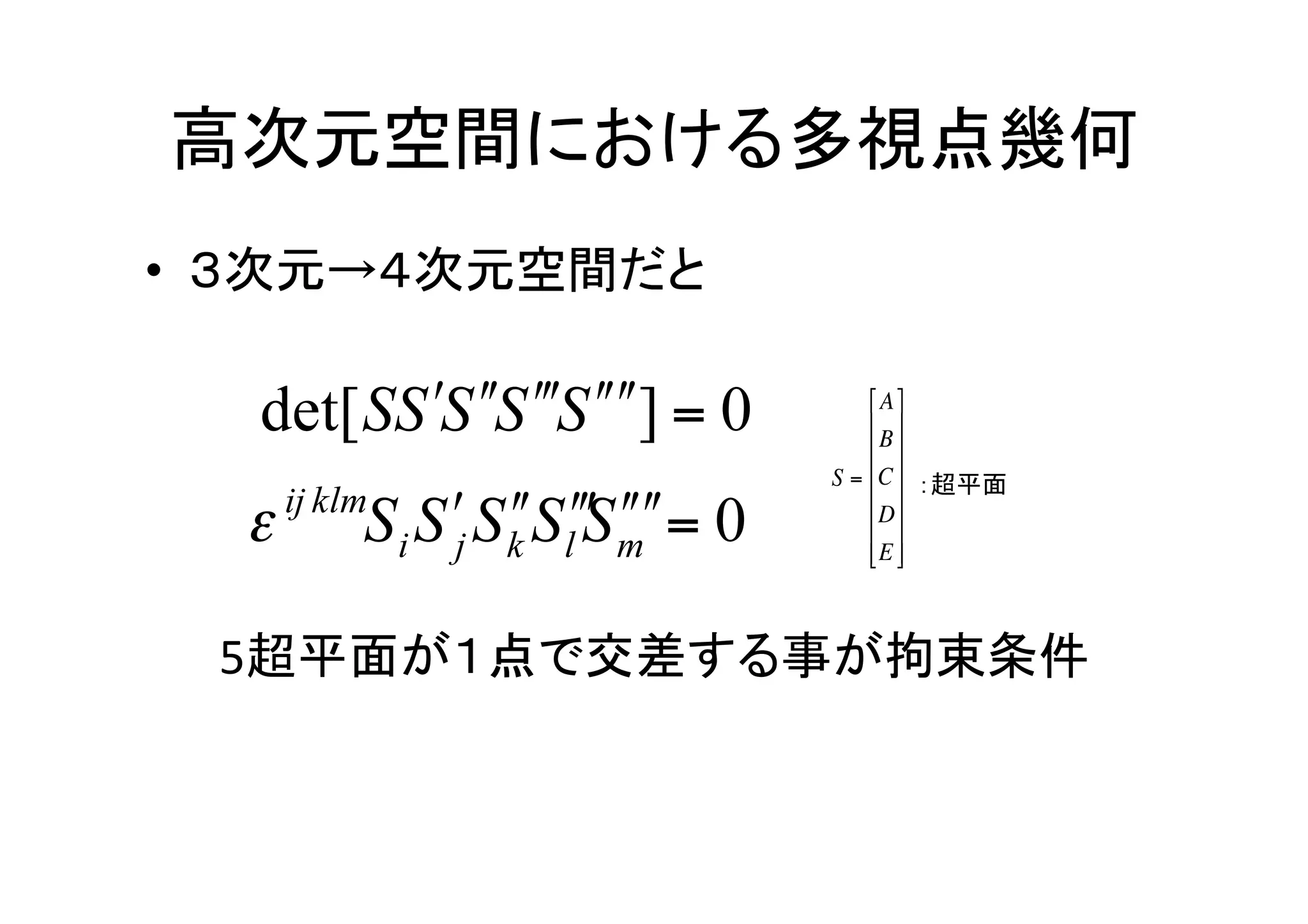
4次元空間中における5つの超平面が1点で交差するという5超平面の拘束
€
4次元空間中での拘束条件
det [U Uʹ′ Uʹ′ Uʹ′ʹ′ Uʹ′ʹ′ ] = 0
10.
2次元への投影(4次元)
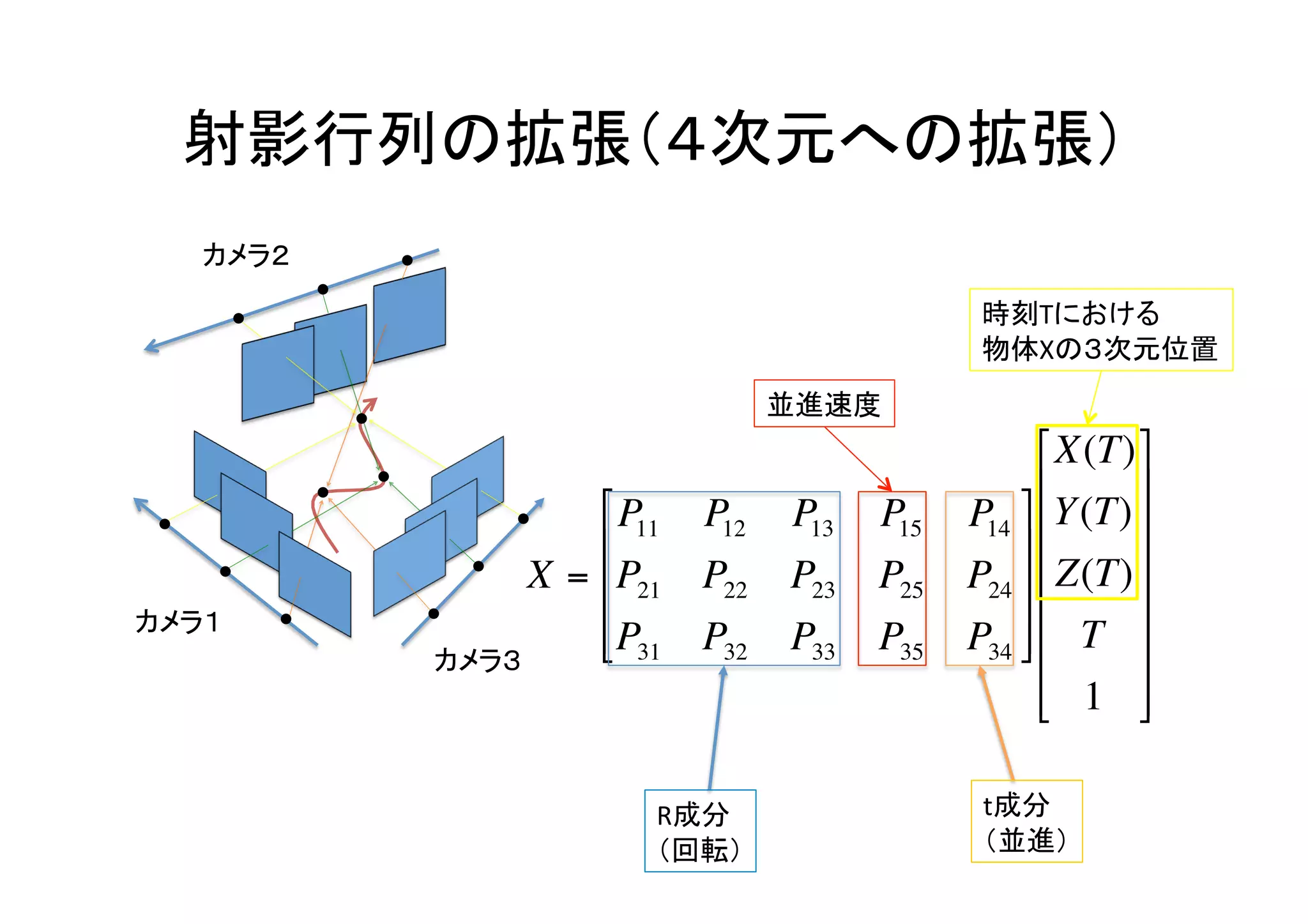
• 4次元空間中の点Wを2次元画像上の点xへの投影を考える
x ~ PW
定数倍の不定
⎡ P11 P12 P13 P15 P14 ⎤
T T ⎢ ⎥
W = [W 1 W 2 W 3 W 4 W 5] x = [ x1 x2 x3] P = ⎢P21 P22 P23 P25 P24 ⎥
€ ⎢P31
⎣ P32 P33 P35 P34 ⎥
⎦
€
€
€
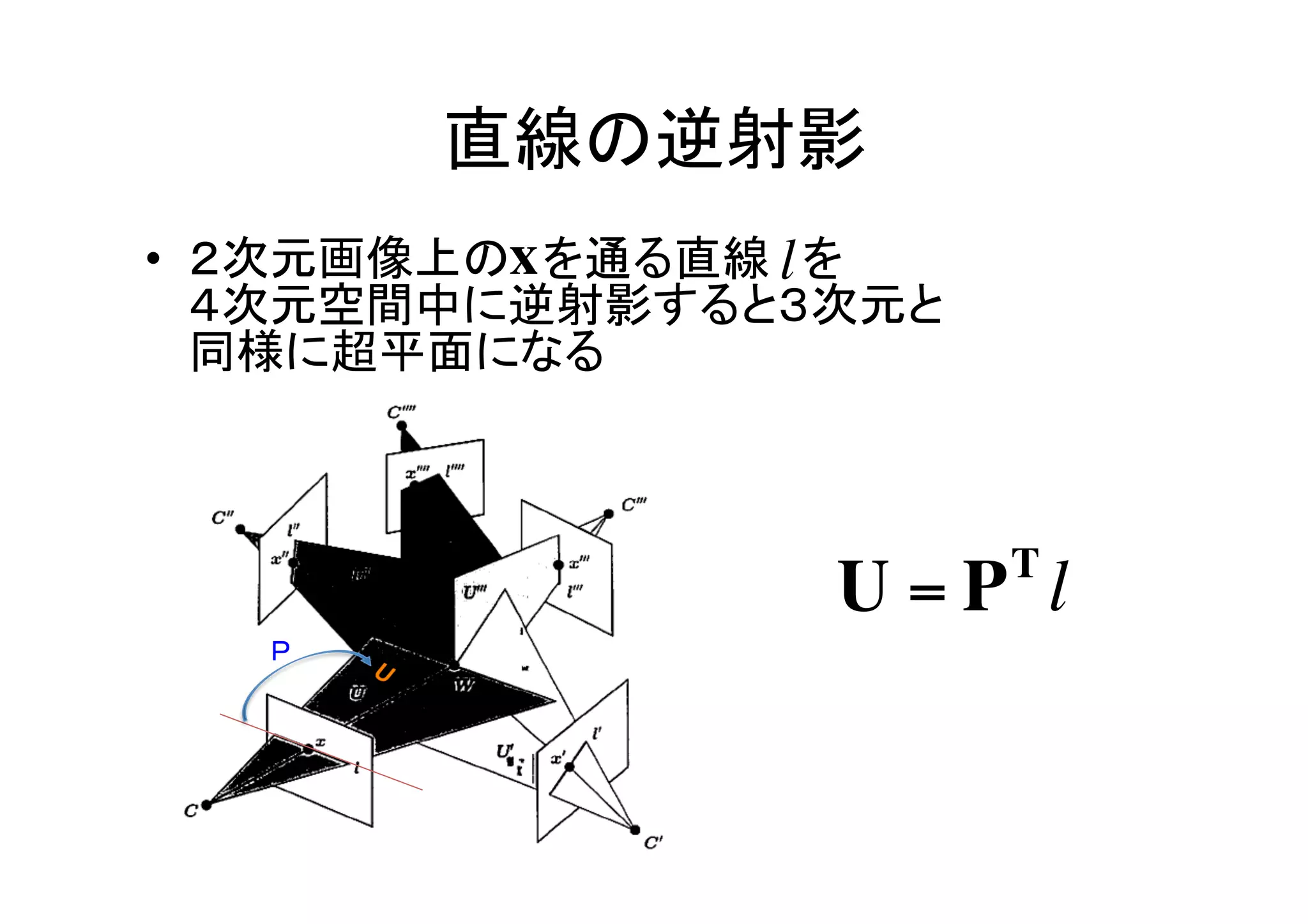
直線の逆射影
x
• 2次元画像上の を通る直線 を
l
4次元空間中に逆射影すると3次元と
同様に超平面になる
€ €
T
U=P l
P
€
13.
テンソルで表す
• 拘束条件に置き換える
det [U Uʹ′ Uʹ′ Uʹ′ʹ′ Uʹ′ʹ′ ] = 0
det [PT l Pʹ′T lʹ′ Pʹ′ T lʹ′ Pʹ′ʹ′T lʹ′ʹ′ Pʹ′ʹ′ T lʹ′ʹ′ ] = 0
テンソル表記
ijklm p q r s t
€ ε Pi l p Pʹ′j lʹ′ Pk lʹ′Plʹ′ʹ′ lʹ′ʹ′Pmʹ′ lʹ′ʹ′ = 0
q ʹ′ r s ʹ′ t
€
i=5
⎡ P11 P12 P13 P15 P14 ⎤
⎢ ⎥ 同様に
p j,k,l,m={1,2,3,4,5}
Pi = p=3
⎢P21 P22 P23 P25 P24 ⎥
€ ⎢P31 P32 P33 P35 P34 ⎥
⎣ ⎦
q,r,s,t={1,2,3}
14.
テンソルで表す
• 拘束条件に置き換える
det [U Uʹ′ Uʹ′ Uʹ′ʹ′ Uʹ′ʹ′ ] = 0
det [PT l Pʹ′T lʹ′ Pʹ′ T lʹ′ Pʹ′ʹ′T lʹ′ʹ′ Pʹ′ʹ′ T lʹ′ʹ′ ] = 0
テンソル表記
ijklm p q r s t
€ ε Pi l p Pʹ′j lʹ′ Pk lʹ′Plʹ′ʹ′ lʹ′ʹ′Pmʹ′ lʹ′ʹ′ = 0
q ʹ′ r s ʹ′ t
€
縮約されるテンソルは入れ替え可能なので
ijklm p q r s t
lp lʹ′ lʹ′ lʹ′ʹ′lʹ′ε
q r s t ʹ′ Pi Pʹ′j Pk Plʹ′ʹ′ Pmʹ′ = 0
ʹ′ ʹ′
€ 5重線形拘束
15.
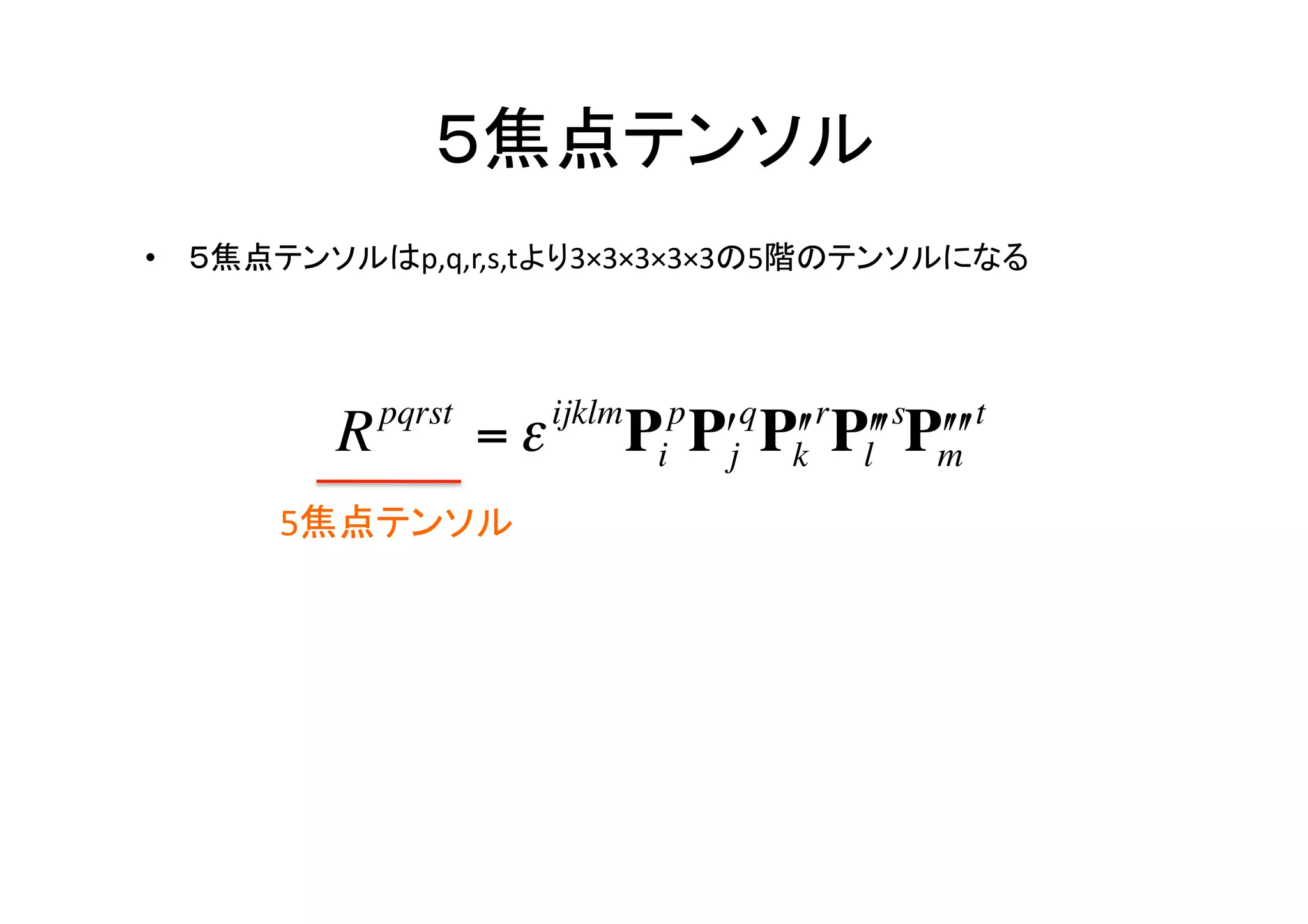
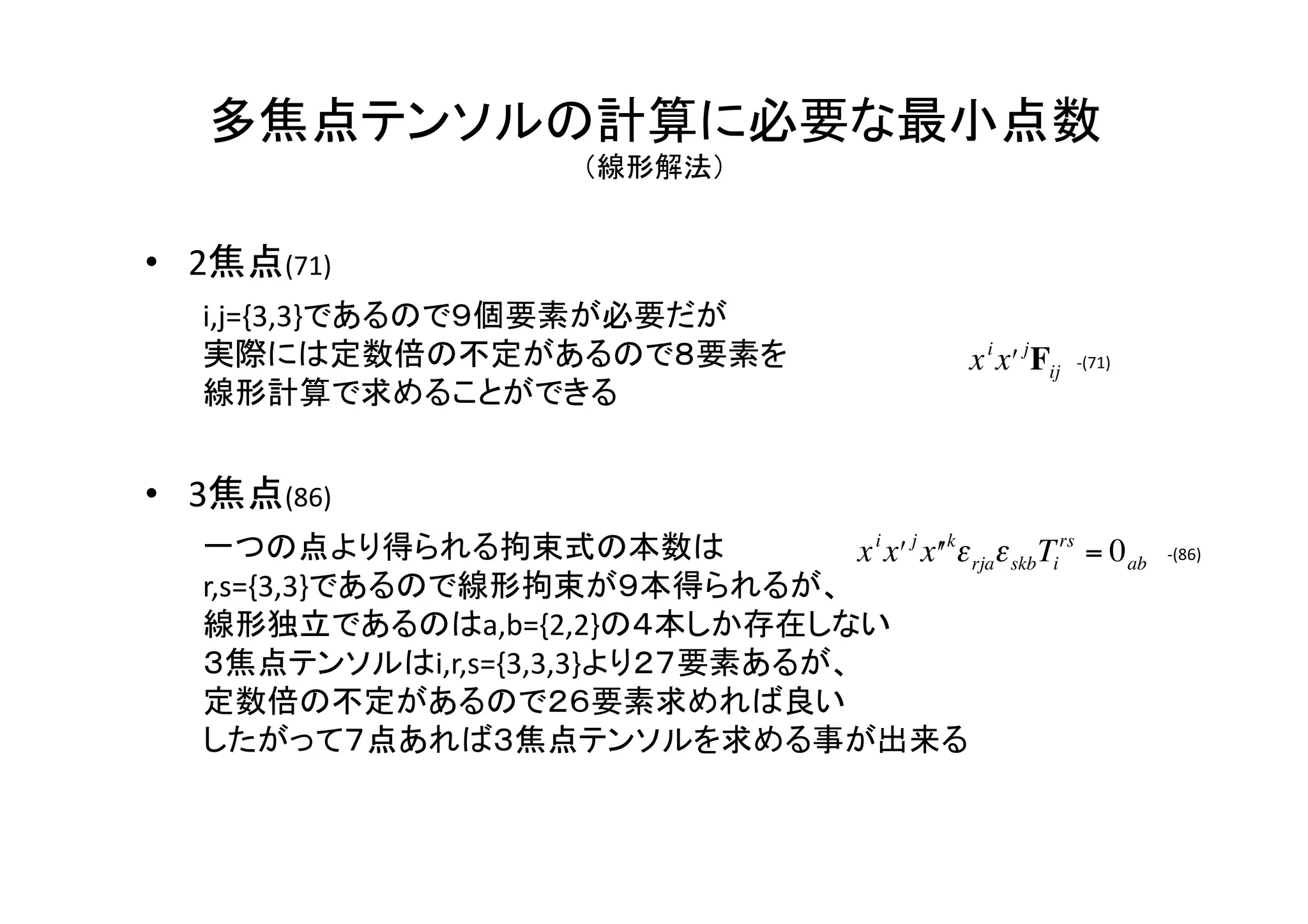
5焦点テンソル
• 5焦点テンソルはp,q,r,s,tより3×3×3×3×3の5階のテンソルになる
pqrst ijklm p q r s t
R =ε Pi Pʹ′j Pk Plʹ′ʹ′ Pmʹ′
ʹ′ ʹ′
5焦点テンソル
€
16.
点や直線に関する5重線形拘束
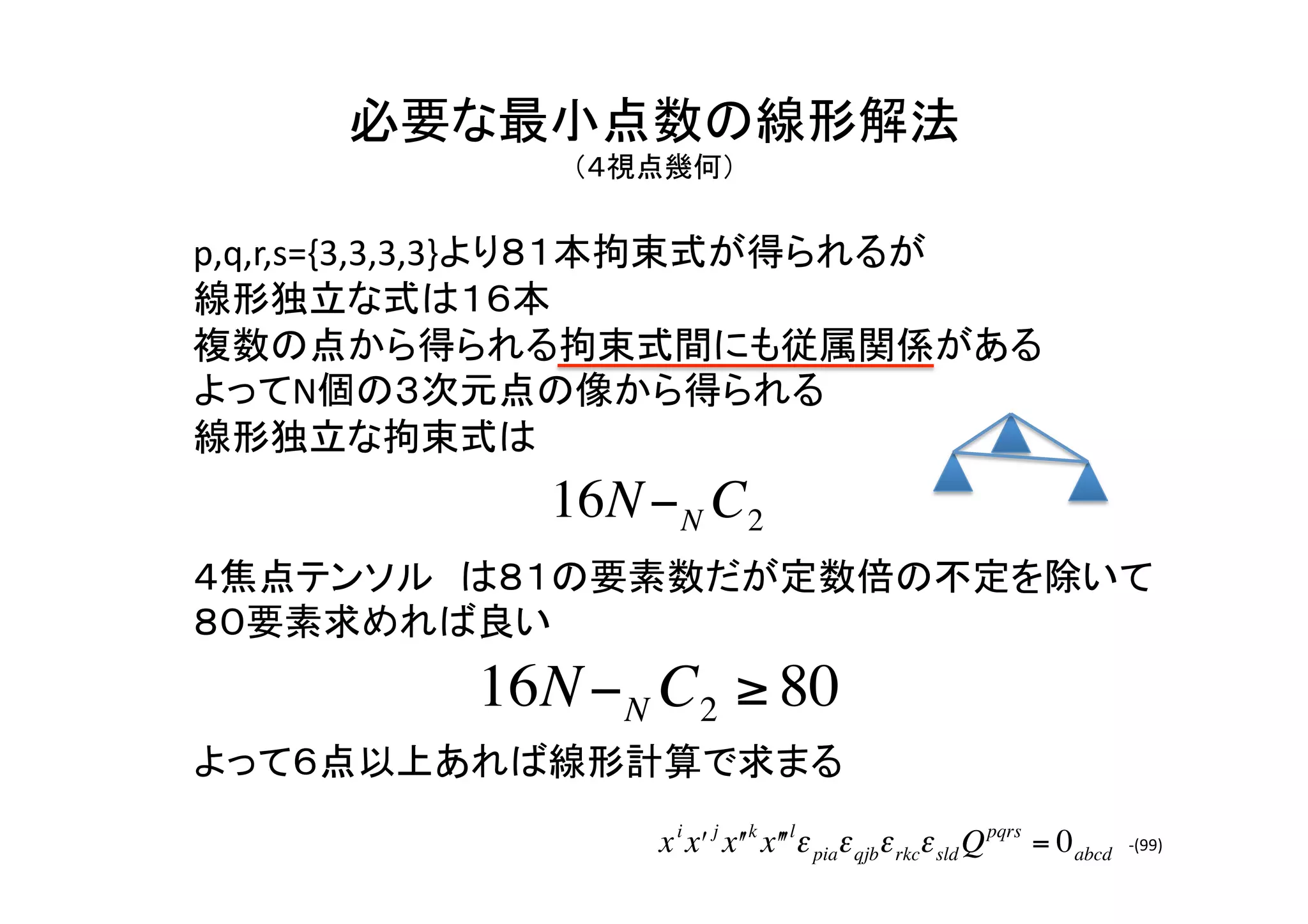
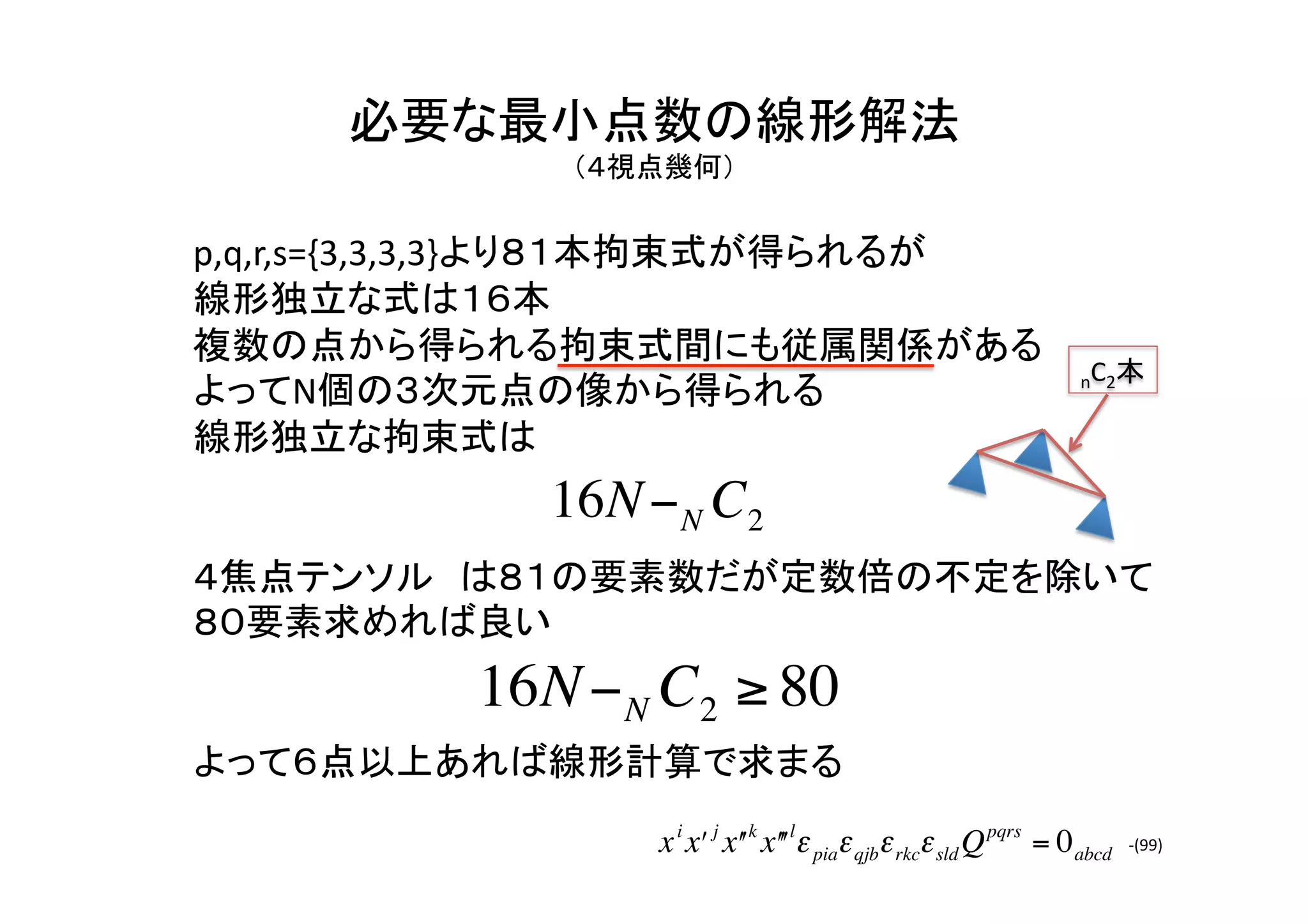
• 4次元空間から2次元画像への投影を行う
l=x×y
拡張カメラが5つ存在する場合(5視点幾何)
lp = ε pja x j y a
lp lʹ′ lʹ′ lʹ′ʹ′lʹ′ʹ′ pqrst = 0
q r s tR lp = ε pja x j
a,b,c,d,e={1,2}
x i lʹ′ lʹ′ lʹ′ʹ′lʹ′ε pia R pqrst = 0 a
q r s t ʹ′
x i xʹ′ j lʹ′ lʹ′ʹ′lʹ′ε piaε qjb R pqrst = 0 ab
r s t ʹ′ €
€
x i xʹ′ j xʹ′ k lʹ′ʹ′lʹ′ε piaε qjbε rkc R pqrst = 0 abc
s t ʹ′
€
x i xʹ′ j xʹ′ k xʹ′ʹ′l lʹ′ε piaε qjbε rkcε sld R pqrst = 0 abcd
t ʹ′
€
x i xʹ′ j xʹ′ k xʹ′ʹ′l xʹ′ʹ′ mε piaε qjbε rkcε sld ε tme R pqrst = 0 abcde
€
17.
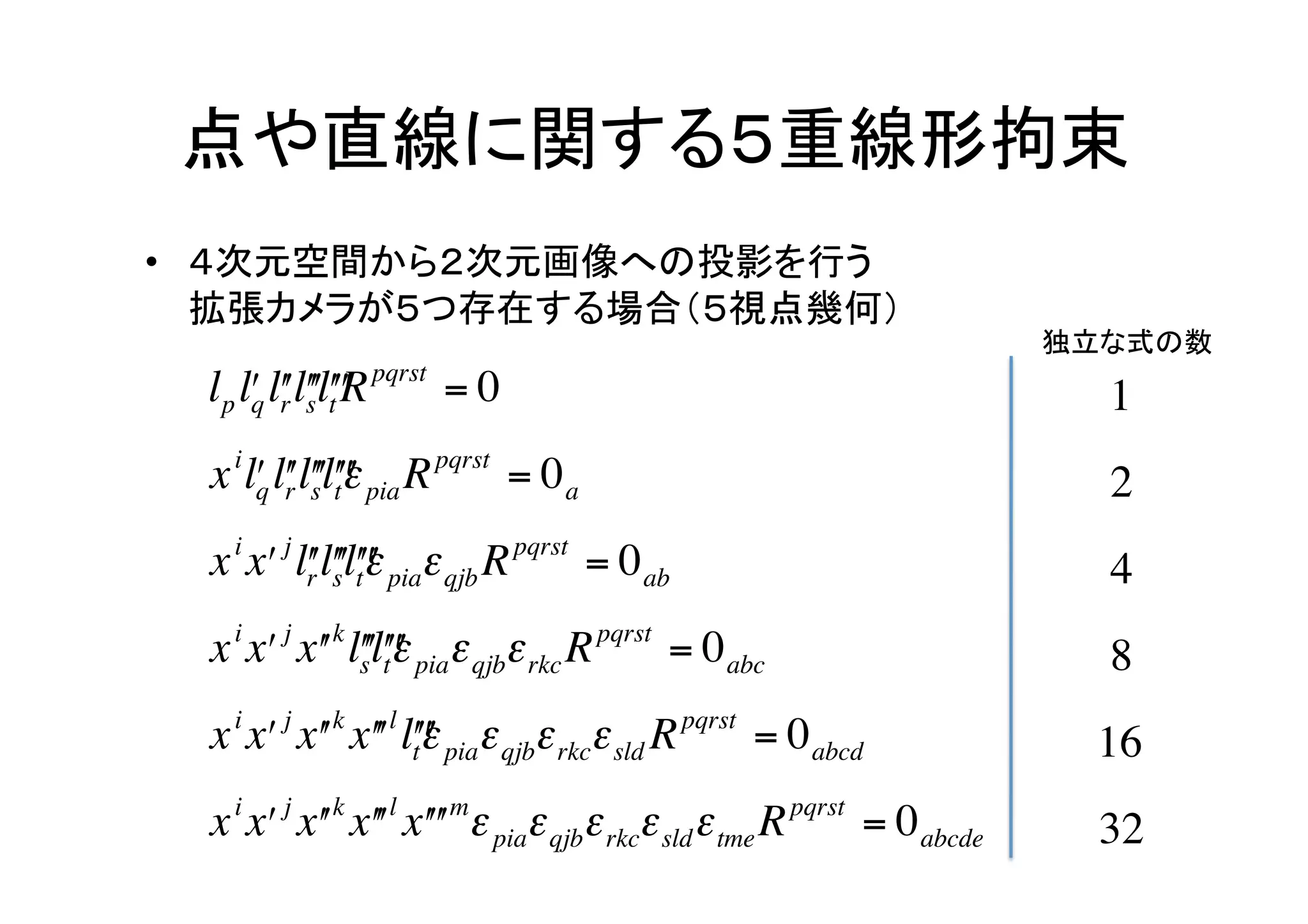
点や直線に関する5重線形拘束
• 4次元空間から2次元画像への投影を行う
拡張カメラが5つ存在する場合(5視点幾何)
独立な式の数
lp lʹ′ lʹ′ lʹ′ʹ′lʹ′ʹ′ pqrst = 0
q r s tR 1
x i lʹ′ lʹ′ lʹ′ʹ′lʹ′ε pia R pqrst = 0 a
q r s t ʹ′ 2
x i xʹ′ j lʹ′ lʹ′ʹ′lʹ′ε piaε qjb R pqrst = 0 ab
r s t ʹ′ € 4
€
x i xʹ′ j xʹ′ k lʹ′ʹ′lʹ′ε piaε qjbε rkc R pqrst = 0 abc
s t ʹ′ € 8
€
x i xʹ′ j xʹ′ k xʹ′ʹ′l lʹ′ε piaε qjbε rkcε sld R pqrst = 0 abcd
t ʹ′ € 16
€
x i xʹ′ j xʹ′ k xʹ′ʹ′l xʹ′ʹ′ mε piaε qjbε rkcε sld ε tme R pqrst = 0 abcde
€ 32
€
18.
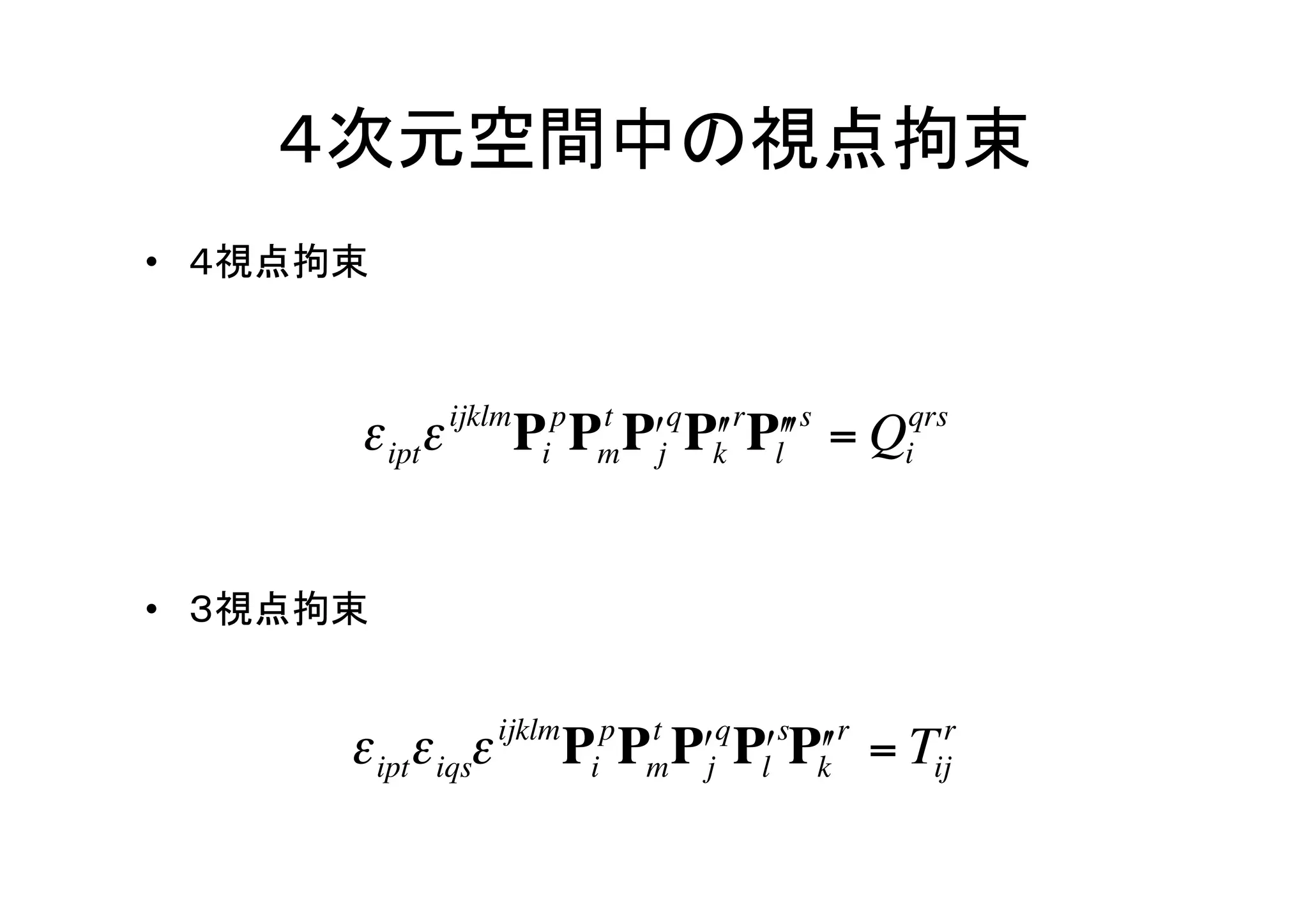
4次元空間中の視点拘束
• 4視点拘束
ijklm p t q r s qrs
ε iptε Pi P Pʹ′j Pk Plʹ′ʹ′ = Q
m ʹ′ i
• 3視点拘束
€
ε iptε iqsε ijklm Pip Pm Pʹ′jq Plʹ′sPk r = Tijr
t
ʹ′
19.
4次元空間中の視点拘束
• 4視点拘束
x i xʹ′ j xʹ′ k xʹ′ʹ′lε qjaε rkbε slcQiqrs = 0 abc 8
x i xʹ′ j xʹ′ k lʹ′ʹ′ qjaε rkb Qiqrs = 0 ab
sε 4
x i xʹ′ j lʹ′ lʹ′ʹ′ qja Qiqrs = 0 a
r sε 2
€ €
x i lʹ′ lʹ′ lʹ′ʹ′Qiqrs = 0
q r s 1
€ €
lp lʹ′ lʹ′ lʹ′ʹ′ ipd Qiqrs = 0 d
q r sε 2
€ €
• 3視点拘束
€
€
x i xʹ′ j xʹ′ kε rka Tijr = 0 a €
€ 2
x i xʹ′ j lʹ′Tijr = 0
r 1
x i lʹ′ lʹ′ε jqc Tijr = 0 c
q r 2
€ €
lp lʹ′ lʹ′ε ipbε jqc Tijr = 0 bc
q r 4
€ €
補足
• テンソルは配列と同じように扱える
0階のテンソル
Int
a
0次元配列(スカラー)
1階のテンソル
Int
a[i]
1次元配列(ベクトル)
2階のテンソル
Int
a[i][j]
2次元配列(行列のようなもの)
3階のテンソル
Int
a[i][j][k]
3次元配列
・
・
・
・
・
・

![拘束条件(4次元 p124あたり )
点が超平面と交差すると以下の式が成り立つ
T T
U W =0 W = [W 1 W 2 W 3 W 4 W 5]
T
U = [U1 U 2 U 3 U 4 U5 ]
例:時刻Tを4次元目の値にする
T €
W = [X Y Z T 1] :4次元空間中の点
T €
U = [A B C D E ] :4次元空間中の超平面
€€
4次元空間中における5つの超平面が1点で交差するという5超平面の拘束
€
4次元空間中での拘束条件
det [U Uʹ′ Uʹ′ Uʹ′ʹ′ Uʹ′ʹ′ ] = 0](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-9-2048.jpg)
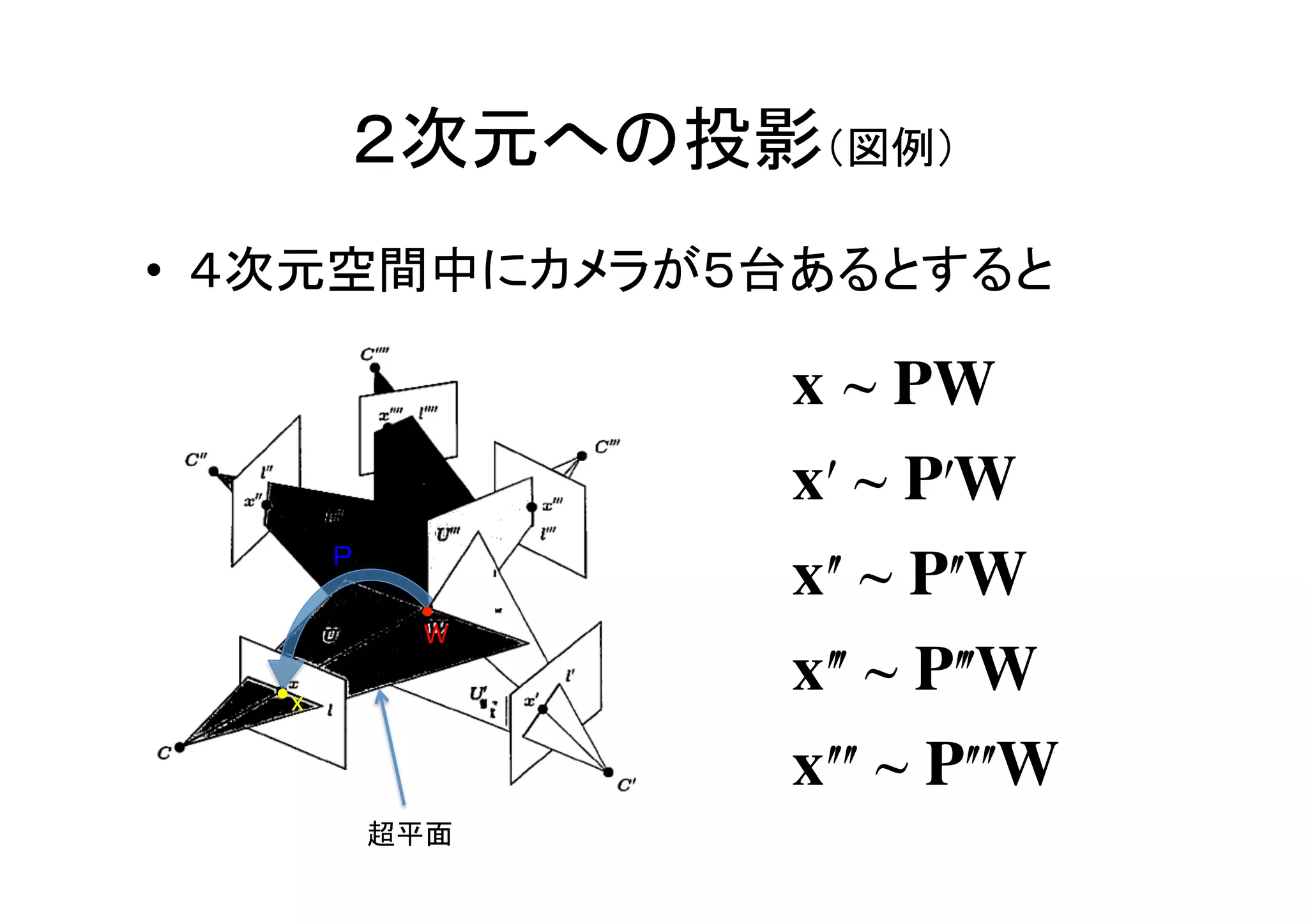
![2次元への投影(4次元)
• 4次元空間中の点Wを2次元画像上の点xへの投影を考える
x ~ PW
定数倍の不定
⎡ P11 P12 P13 P15 P14 ⎤
T T ⎢ ⎥
W = [W 1 W 2 W 3 W 4 W 5] x = [ x1 x2 x3] P = ⎢P21 P22 P23 P25 P24 ⎥
€ ⎢P31
⎣ P32 P33 P35 P34 ⎥
⎦
€
€
€](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-10-2048.jpg)
![テンソルで表す
• 拘束条件に置き換える
det [U Uʹ′ Uʹ′ Uʹ′ʹ′ Uʹ′ʹ′ ] = 0
det [PT l Pʹ′T lʹ′ Pʹ′ T lʹ′ Pʹ′ʹ′T lʹ′ʹ′ Pʹ′ʹ′ T lʹ′ʹ′ ] = 0
テンソル表記
ijklm p q r s t
€ ε Pi l p Pʹ′j lʹ′ Pk lʹ′Plʹ′ʹ′ lʹ′ʹ′Pmʹ′ lʹ′ʹ′ = 0
q ʹ′ r s ʹ′ t
€
i=5
⎡ P11 P12 P13 P15 P14 ⎤
⎢ ⎥ 同様に
p j,k,l,m={1,2,3,4,5}
Pi = p=3
⎢P21 P22 P23 P25 P24 ⎥
€ ⎢P31 P32 P33 P35 P34 ⎥
⎣ ⎦
q,r,s,t={1,2,3}](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-13-2048.jpg)
![テンソルで表す
• 拘束条件に置き換える
det [U Uʹ′ Uʹ′ Uʹ′ʹ′ Uʹ′ʹ′ ] = 0
det [PT l Pʹ′T lʹ′ Pʹ′ T lʹ′ Pʹ′ʹ′T lʹ′ʹ′ Pʹ′ʹ′ T lʹ′ʹ′ ] = 0
テンソル表記
ijklm p q r s t
€ ε Pi l p Pʹ′j lʹ′ Pk lʹ′Plʹ′ʹ′ lʹ′ʹ′Pmʹ′ lʹ′ʹ′ = 0
q ʹ′ r s ʹ′ t
€
縮約されるテンソルは入れ替え可能なので
ijklm p q r s t
lp lʹ′ lʹ′ lʹ′ʹ′lʹ′ε
q r s t ʹ′ Pi Pʹ′j Pk Plʹ′ʹ′ Pmʹ′ = 0
ʹ′ ʹ′
€ 5重線形拘束](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-14-2048.jpg)





![補足
• テンソルは配列と同じように扱える
0階のテンソル
Int
a
0次元配列(スカラー)
1階のテンソル
Int
a[i]
1次元配列(ベクトル)
2階のテンソル
Int
a[i][j]
2次元配列(行列のようなもの)
3階のテンソル
Int
a[i][j][k]
3次元配列
・
・
・
・
・
・](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-33-2048.jpg)
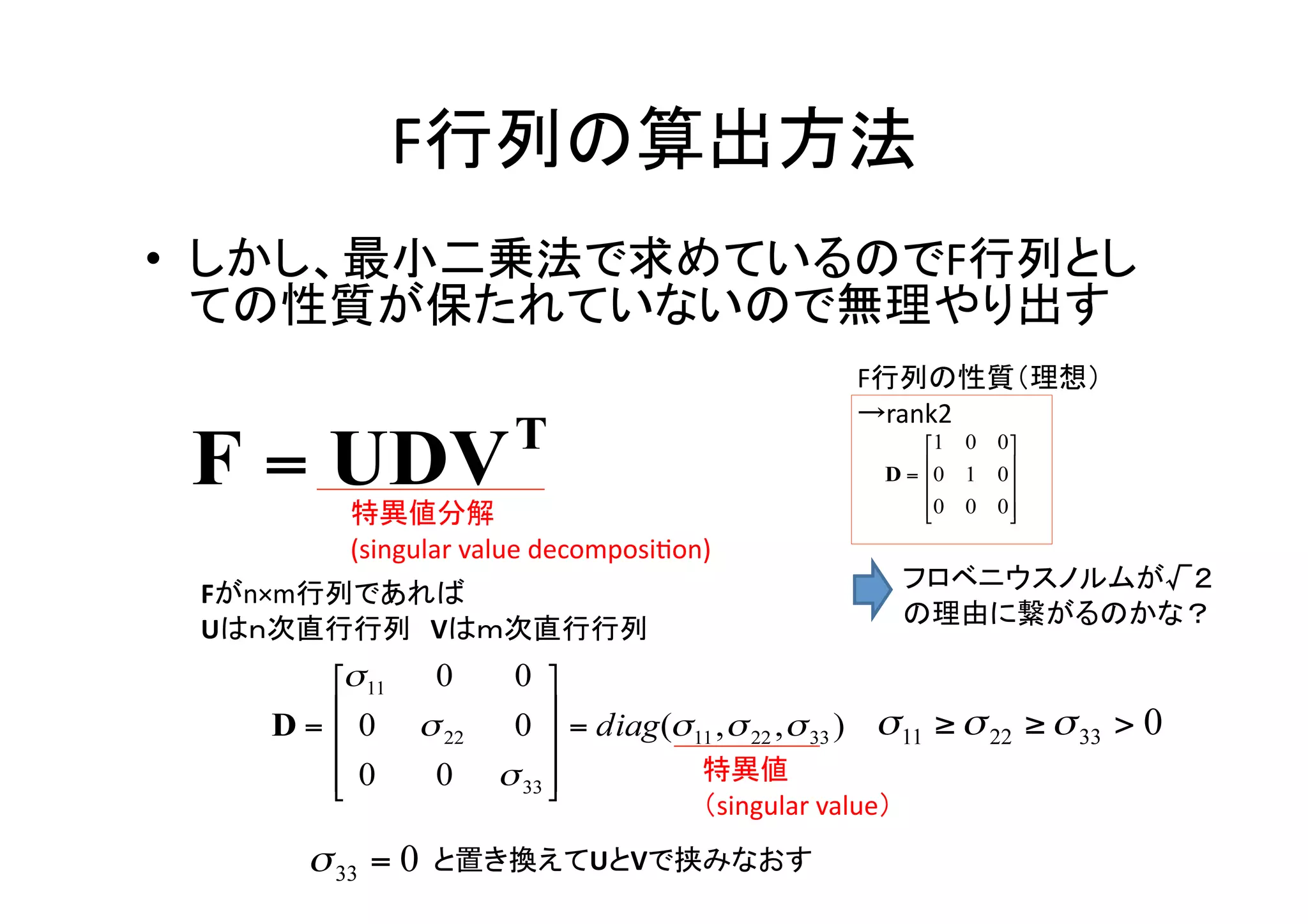
![F行列の算出方法
• 8点法(8point
algorithm)
定数倍の不定を
|f|=1として解くと一要素分減る
⎡ f11 ⎤
例
⎢ ⎥ ⎡ u1u1
ʹ′ v1u1
ʹ′ u1
ʹ′ u1v1
ʹ′ v1v1
ʹ′ v1
ʹ′ u1
⎡ f ⎤
v1 1⎤⎢ 11 ⎥ ⎡0 ⎤
⎢ f12 ⎥ ⎢ ⎥ f ⎢ ⎥
⎢ f13 ⎥ ⎢ ⎥⎢ 12 ⎥ ⎢0 ⎥
⎢ f13 ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢0 ⎥
⎢ f 21 ⎥ ⎢ ⎥ f ⎢ ⎥
[uu' vu' u' uv' vv' v' u v 1]⎢ f 22 ⎥ = 0 ×8
⎢ ⎥⎢ 21 ⎥ ⎢0 ⎥
⎢ f ⎥ =
⎢ ⎥ ⎢ ⎥⎢ 22 ⎥ ⎢0 ⎥
⎢ f 23 ⎥ ⎢ ⎥ f ⎢ ⎥
⎥⎢ 23 ⎥ ⎢0 ⎥
⎢
⎢ f 31 ⎥
⎢ f ⎥
1つのマッチング
⎢ f 32 ⎥ ⎢ ⎥
⎢
⎢u u
⎥⎢ 31 ⎥ ⎢0 ⎥
f
⎢ f 33 ⎥
⎣ ⎦ ⎣ 8 ʹ′
8 v 8 uʹ′
8 uʹ′
8 u8vʹ′
8 v 8vʹ′
8 vʹ′ u8 v 8 1⎥⎢ 32 ⎥ ⎢0 ⎥
8 ⎦ ⎣ ⎦
⎢ f 33 ⎥
⎣ ⎦
€ €
ヒント:
最小固有値に対応する
特徴点マッチング→u,v:u’,v’既知
固有ベクトル
fパラメータ](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-34-2048.jpg)
![共変テンソル、反変テンソル
• 点の座標は基底ベクトルに対して逆の変換を受ける
Z
a = [e e 2 e 3 ] ⎡ a1 ⎤
1
⎢ 2 ⎥
⎢a ⎥
基底ベクトル
⎢a ⎥
3
a
⎣ ⎦
Y
€
aベクトル
e3
e
2
€
e1
= Ea € 点座標
X
= EHH −1a
点の座標aに対し
⎡1 ⎤ ⎡0 ⎤ ⎡0 ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥ H−1の変換
e1 = ⎢0 ⎥ e 2 = ⎢1 ⎥ e 3 = ⎢0 ⎥ 基底ベクトルe1,e2,e3に対し
⎢0 ⎥
⎣ ⎦ ⎢0 ⎥
⎣ ⎦ ⎢1 ⎥
⎣ ⎦ € Hの変換](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-37-2048.jpg)
![射影カメラ行列
• 世界座標系の点を画像上に射影する行列
⎡ f ⎤
⎢ 0 ox ⎥
⎡ x uh ⎤ ⎢ hx ⎥ ⎡ R1 −R1T ⎤
p = MP ⎢ ⎥ f ⎢ ⎥
射影カメラ行列
p = ⎢ y uh ⎥ = ⎢ 0 oy ⎥ ⎢R2 −R2T⎥P
⎢ hy ⎥
⎢ zuh ⎥ ⎢
⎣ ⎦ ⎢R −R3T⎥
0 0 1 ⎥ ⎣ 3 ⎦
画像の中心を(0,0)
⎢ ⎥
とした座標系
⎣ ⎦
€ 内部パラメータ
外部パラメータ
M = MiMe € ⎡ f ⎤
⎢ h 0 ox ⎥
P = [Pw 1] ⎢ x ⎥ ⎡ R1 −R1T ⎤
f ⎢ ⎥
M i = ⎢ 0 oy ⎥ M e = ⎢R2 −R2T⎥
⎢ hy ⎥
⎢ 0 ⎢R3
⎣ −R3T⎥ 3×4
⎦
0 1 ⎥
⎢
⎣ ⎥
⎦
€ €](https://image.slidesharecdn.com/cvim-chapter4-5-kenhide-130227112151-phpapp01/75/Cvim-chapter4-5-ken_hide-40-2048.jpg)