Download to read offline
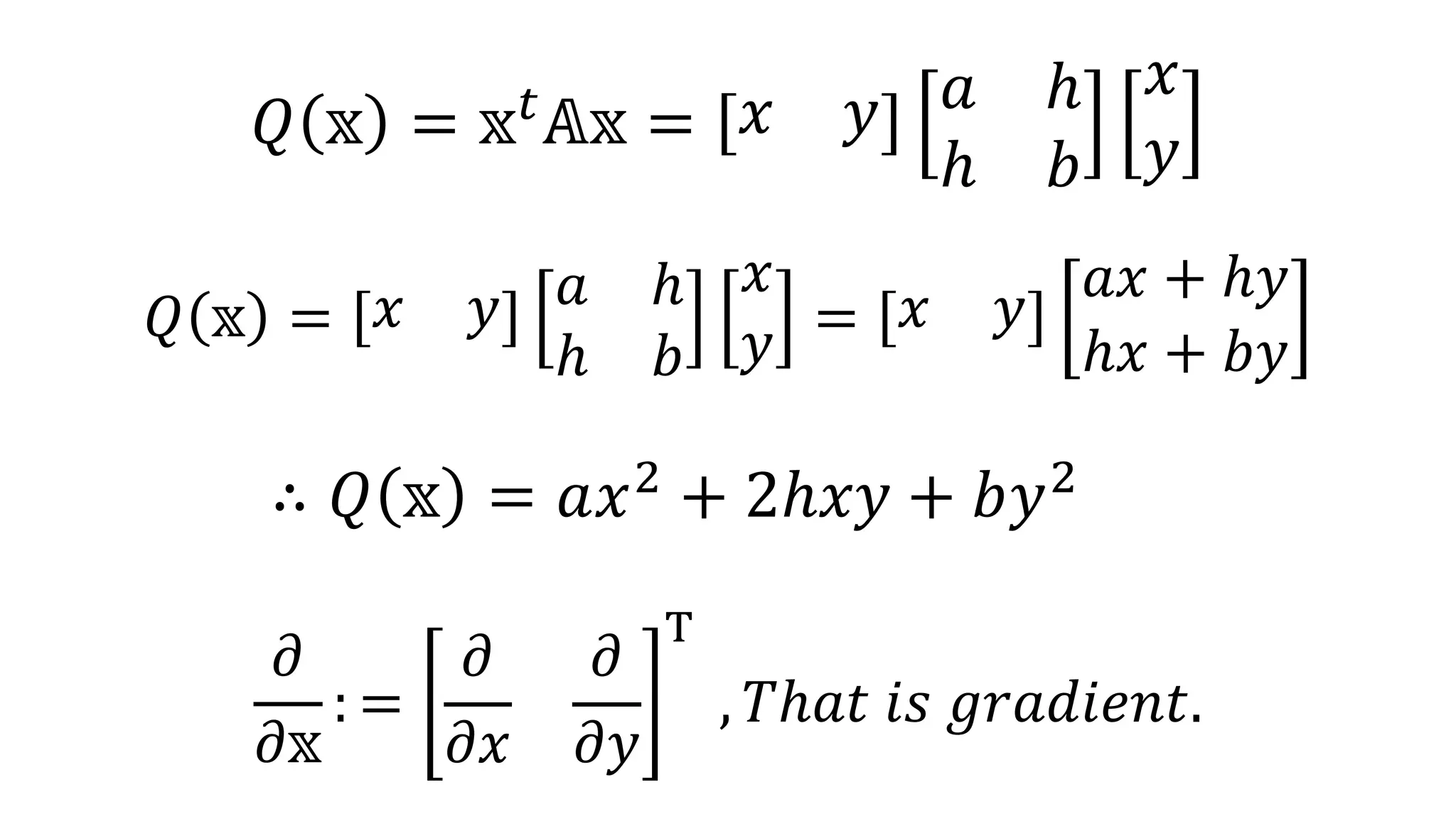
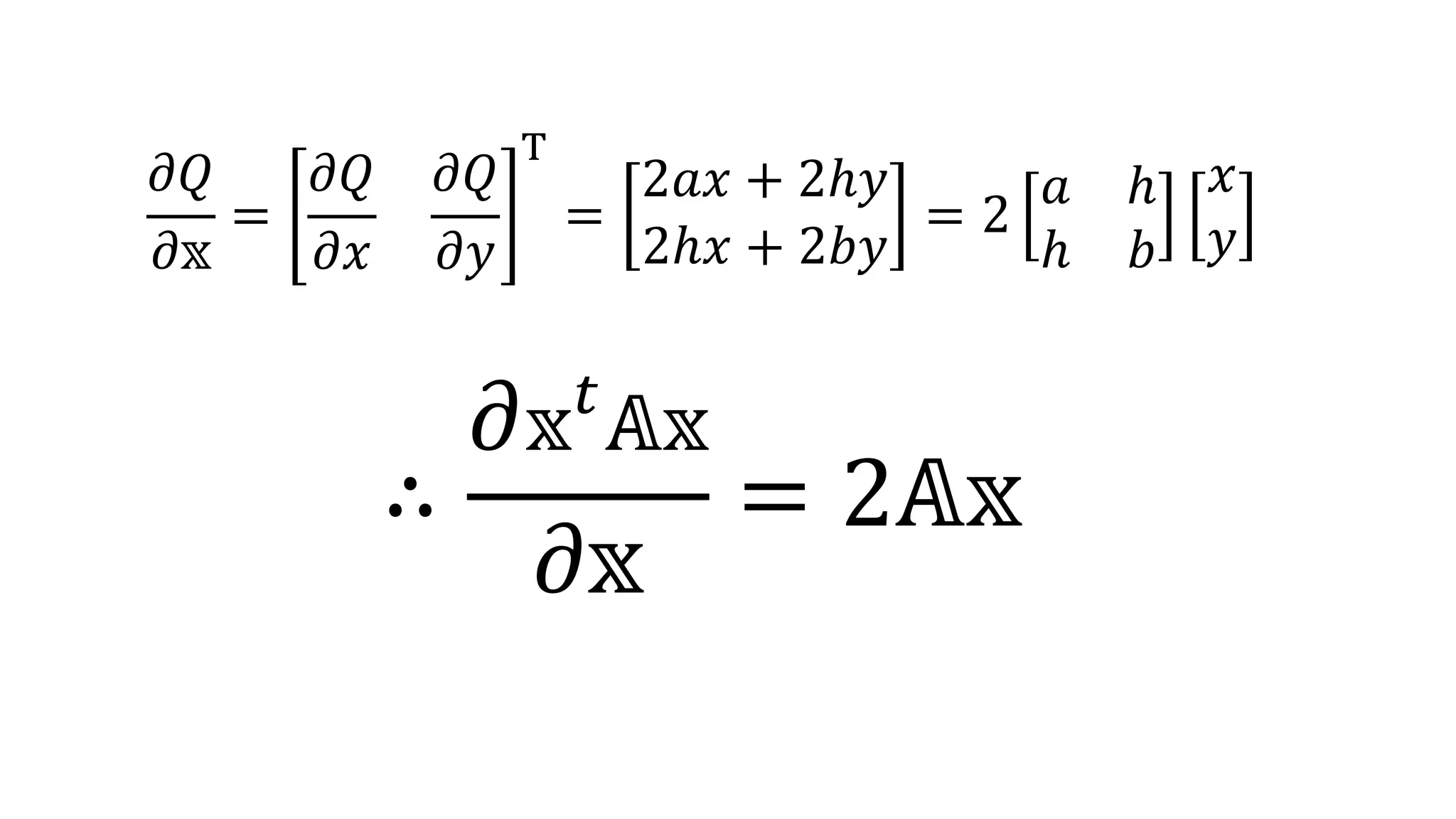
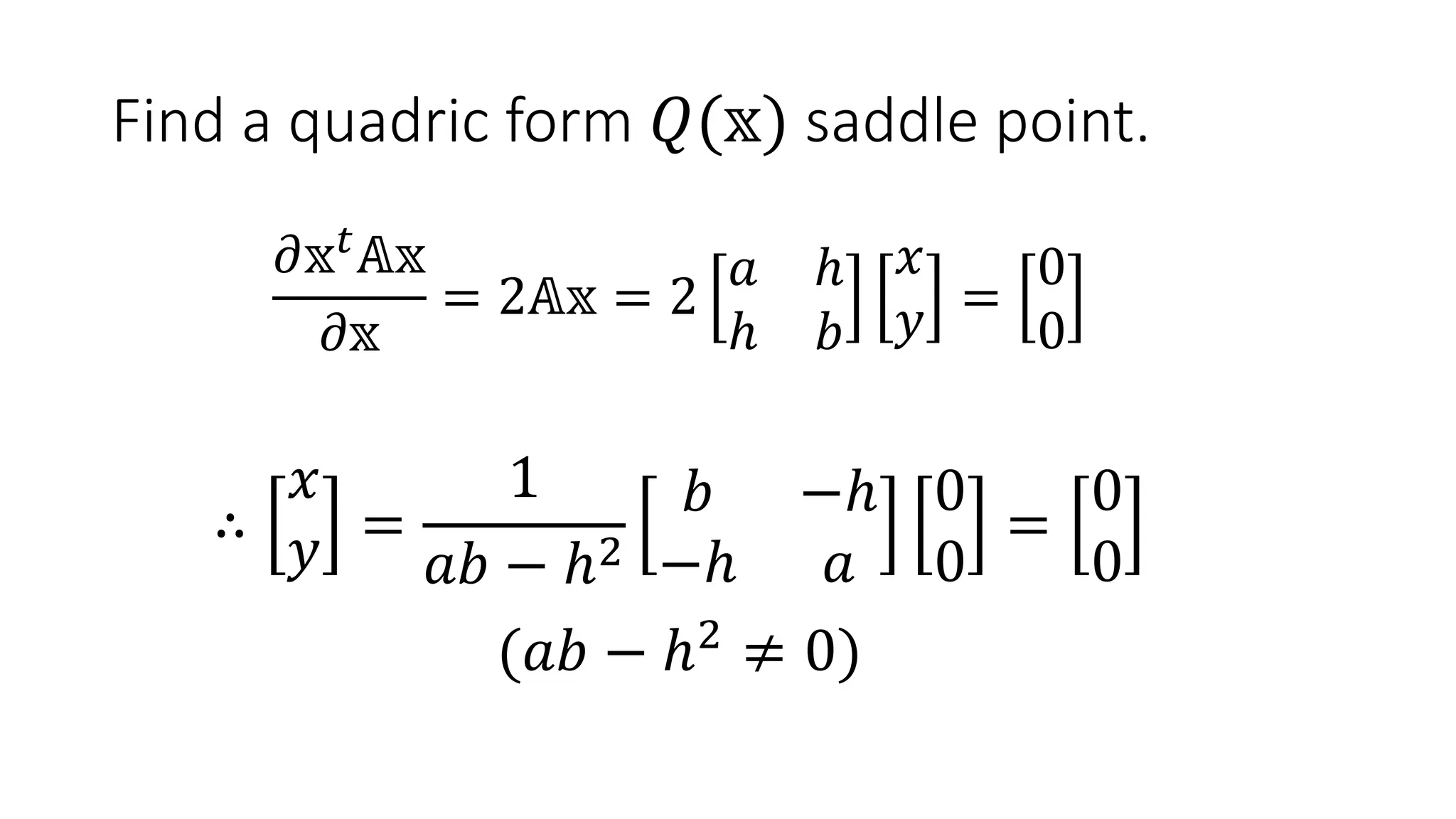

The document discusses the derivative of a quadratic form Q(x) = xTAx. It shows that the gradient of Q(x) is equal to 2Ax. To find the saddle point of Q(x), the derivative with respect to x, which is 2Ax, is set equal to 0. Solving this results in an expression for the coordinates x and y of the saddle point in terms of the coefficients of the quadratic form matrix A.