Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
HS
Uploaded by
Horiguchi Shuhei
PPTX, PDF
2,098 views
超複素数
HARADA Hiroyuki @ Osaka Robocon Day 2019
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 23
2
/ 23
3
/ 23
4
/ 23
5
/ 23
6
/ 23
7
/ 23
8
/ 23
9
/ 23
10
/ 23
11
/ 23
12
/ 23
13
/ 23
14
/ 23
15
/ 23
16
/ 23
17
/ 23
18
/ 23
19
/ 23
20
/ 23
21
/ 23
22
/ 23
23
/ 23
More Related Content
PDF
古典プログラマ向け量子プログラミング入門 [フル版]
by
OsSAL
PDF
Kaggle&競プロ紹介 in 中田研究室
by
Takami Sato
PDF
強化学習その2
by
nishio
PDF
数学で解き明かす深層学習の原理
by
Taiji Suzuki
PDF
oTreeの概要と実験方法の展開可能性について
by
Akira Goto
PDF
分類問題 - 機械学習ライブラリ scikit-learn の活用
by
y-uti
PDF
SEMを用いた縦断データの解析 潜在曲線モデル
by
Masaru Tokuoka
PDF
計算機結構 (習題:Nand2tetris硬體部分)
by
鍾誠 陳鍾誠
古典プログラマ向け量子プログラミング入門 [フル版]
by
OsSAL
Kaggle&競プロ紹介 in 中田研究室
by
Takami Sato
強化学習その2
by
nishio
数学で解き明かす深層学習の原理
by
Taiji Suzuki
oTreeの概要と実験方法の展開可能性について
by
Akira Goto
分類問題 - 機械学習ライブラリ scikit-learn の活用
by
y-uti
SEMを用いた縦断データの解析 潜在曲線モデル
by
Masaru Tokuoka
計算機結構 (習題:Nand2tetris硬體部分)
by
鍾誠 陳鍾誠
What's hot
PPTX
【解説】 一般逆行列
by
Kenjiro Sugimoto
PDF
グラフィカルモデル入門
by
Kawamoto_Kazuhiko
PPTX
WAICとWBICのご紹介
by
Tomoki Matsumoto
PPTX
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial)
by
RyuichiKanoh
PDF
線形計画法入門
by
Shunji Umetani
PDF
多人数不完全情報ゲームにおけるAI ~ポーカーと麻雀を例として~
by
Kenshi Abe
PDF
オークションの仕組み
by
Yosuke YASUDA
PDF
単一事例研究法と統計的推測:ベイズ流アプローチを架け橋として (文字飛び回避版はこちら -> https://www.slideshare.net/yos...
by
Yoshitake Takebayashi
PPTX
【論文読み会】Moser Flow: Divergence-based Generative Modeling on Manifolds
by
ARISE analytics
PDF
PRML輪読#10
by
matsuolab
PDF
PsychoPyを使った初学者向けの心理実験環境の構築
by
Hirokazu Ogawa
PDF
2 4.devianceと尤度比検定
by
logics-of-blue
PDF
組合せ最適化入門:線形計画から整数計画まで
by
Shunji Umetani
PDF
機械学習によるデータ分析まわりのお話
by
Ryota Kamoshida
PDF
統計的学習理論チュートリアル: 基礎から応用まで (Ibis2012)
by
Taiji Suzuki
PDF
2 2.尤度と最尤法
by
logics-of-blue
PDF
MineRL Competition Tutorial with ChainerRL
by
Preferred Networks
PDF
深層学習入門
by
Danushka Bollegala
PDF
パターン認識 05 ロジスティック回帰
by
sleipnir002
PDF
ソーシャルゲームの為のデータベース設計
by
kaminashi
【解説】 一般逆行列
by
Kenjiro Sugimoto
グラフィカルモデル入門
by
Kawamoto_Kazuhiko
WAICとWBICのご紹介
by
Tomoki Matsumoto
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial)
by
RyuichiKanoh
線形計画法入門
by
Shunji Umetani
多人数不完全情報ゲームにおけるAI ~ポーカーと麻雀を例として~
by
Kenshi Abe
オークションの仕組み
by
Yosuke YASUDA
単一事例研究法と統計的推測:ベイズ流アプローチを架け橋として (文字飛び回避版はこちら -> https://www.slideshare.net/yos...
by
Yoshitake Takebayashi
【論文読み会】Moser Flow: Divergence-based Generative Modeling on Manifolds
by
ARISE analytics
PRML輪読#10
by
matsuolab
PsychoPyを使った初学者向けの心理実験環境の構築
by
Hirokazu Ogawa
2 4.devianceと尤度比検定
by
logics-of-blue
組合せ最適化入門:線形計画から整数計画まで
by
Shunji Umetani
機械学習によるデータ分析まわりのお話
by
Ryota Kamoshida
統計的学習理論チュートリアル: 基礎から応用まで (Ibis2012)
by
Taiji Suzuki
2 2.尤度と最尤法
by
logics-of-blue
MineRL Competition Tutorial with ChainerRL
by
Preferred Networks
深層学習入門
by
Danushka Bollegala
パターン認識 05 ロジスティック回帰
by
sleipnir002
ソーシャルゲームの為のデータベース設計
by
kaminashi
Similar to 超複素数
PDF
楕円曲線入門 トーラスと楕円曲線のつながり
by
MITSUNARI Shigeo
PDF
複素数・四元数と図形の回転
by
Yoshihiro Mizoguchi
PDF
「にじたい」へのいざない #ロマンティック数学ナイト
by
Junpei Tsuji
PDF
情報幾何の基礎輪読会 #1
by
Tatsuki SHIMIZU
PDF
グレブナー基底輪読会 #1 ―準備体操の巻―
by
Yutaka Nagahata
PDF
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
PDF
2015年度秋学期 応用数学(解析) 第12回 複素関数・正則関数 (2015. 12. 10)
by
Akira Asano
PDF
2014年度秋学期 応用数学(解析) 第4部・複素関数論ダイジェスト / 第12回 複素関数・正則関数 (2014. 12. 18)
by
Akira Asano
PDF
Fourier transform
by
ShinoharaTakuto
PDF
集合の直積に関するメモ 𝐴×𝐵={(𝑎,𝑏) | 𝑎∈𝐴, 𝑏∈𝐵}, 𝑝_1 ((𝑎,𝑏))=𝑎,𝑝_2 ((𝑎,𝑏))=𝑏
by
HanpenRobot
PDF
導来代数幾何入門
by
Naoya Umezaki
PDF
公開鍵暗号(2): 有限体
by
Joe Suzuki
PDF
Introduction of introduction_to_group_theory
by
shima o
PDF
内部拘束を持つ3 次元運動の最適計算法と幾何学的モデル選択への応用ViEW2012論文
by
doboncho
PDF
45107
by
psy-pher
PDF
Moig 05
by
Zenghan Liang
PPTX
mathemaical_notation
by
Kenta Oono
PDF
2016年度秋学期 応用数学(解析) 第12回 複素関数・正則関数 (2016. 12. 15)
by
Akira Asano
PDF
2018年度秋学期 応用数学(解析) 第4部・「その先の解析学」への導入 第12回 複素関数論(1) 複素関数・正則関数 (2018. 12. 11)
by
Akira Asano
PDF
kosenconf_Tsukuba_sciences_slide
by
Shigeki Nakamura
楕円曲線入門 トーラスと楕円曲線のつながり
by
MITSUNARI Shigeo
複素数・四元数と図形の回転
by
Yoshihiro Mizoguchi
「にじたい」へのいざない #ロマンティック数学ナイト
by
Junpei Tsuji
情報幾何の基礎輪読会 #1
by
Tatsuki SHIMIZU
グレブナー基底輪読会 #1 ―準備体操の巻―
by
Yutaka Nagahata
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
2015年度秋学期 応用数学(解析) 第12回 複素関数・正則関数 (2015. 12. 10)
by
Akira Asano
2014年度秋学期 応用数学(解析) 第4部・複素関数論ダイジェスト / 第12回 複素関数・正則関数 (2014. 12. 18)
by
Akira Asano
Fourier transform
by
ShinoharaTakuto
集合の直積に関するメモ 𝐴×𝐵={(𝑎,𝑏) | 𝑎∈𝐴, 𝑏∈𝐵}, 𝑝_1 ((𝑎,𝑏))=𝑎,𝑝_2 ((𝑎,𝑏))=𝑏
by
HanpenRobot
導来代数幾何入門
by
Naoya Umezaki
公開鍵暗号(2): 有限体
by
Joe Suzuki
Introduction of introduction_to_group_theory
by
shima o
内部拘束を持つ3 次元運動の最適計算法と幾何学的モデル選択への応用ViEW2012論文
by
doboncho
45107
by
psy-pher
Moig 05
by
Zenghan Liang
mathemaical_notation
by
Kenta Oono
2016年度秋学期 応用数学(解析) 第12回 複素関数・正則関数 (2016. 12. 15)
by
Akira Asano
2018年度秋学期 応用数学(解析) 第4部・「その先の解析学」への導入 第12回 複素関数論(1) 複素関数・正則関数 (2018. 12. 11)
by
Akira Asano
kosenconf_Tsukuba_sciences_slide
by
Shigeki Nakamura
Recently uploaded
PPTX
【ASW22-01】STAMP:STPAロスシナリオの発想・整理支援ツールの開発 ~astah* System Safetyによる構造化・階層化機能の実装...
by
csgy24013
PDF
サーバーサイド Kotlin を社内で普及させてみた - Server-Side Kotlin Night 2025
by
Hirotaka Kawata
PDF
0.0001秒の攻防!?快適な運転を支えるリアルタイム制御と組み込みエンジニアの実践知【DENSO Tech Night 第四夜】
by
dots.
PDF
Rin Ukai_即興旅行の誘発を目的とした口コミ情報に基づく雰囲気キーワード_EC2025.pdf
by
Matsushita Laboratory
PDF
Kubernetes Release Team Release Signal Role について ~Kubernetes Meetup Tokyo #72~
by
Keisuke Ishigami
PDF
Nanami Doikawa_寄り道の誘発を目的とした旅行写真からのスポット印象語彙の推定に関する基礎検討_EC2025
by
Matsushita Laboratory
PPTX
「グローバルワン全員経営」の実践を通じて進化し続けるファーストリテイリングのアーキテクチャ
by
Fast Retailing Co., Ltd.
【ASW22-01】STAMP:STPAロスシナリオの発想・整理支援ツールの開発 ~astah* System Safetyによる構造化・階層化機能の実装...
by
csgy24013
サーバーサイド Kotlin を社内で普及させてみた - Server-Side Kotlin Night 2025
by
Hirotaka Kawata
0.0001秒の攻防!?快適な運転を支えるリアルタイム制御と組み込みエンジニアの実践知【DENSO Tech Night 第四夜】
by
dots.
Rin Ukai_即興旅行の誘発を目的とした口コミ情報に基づく雰囲気キーワード_EC2025.pdf
by
Matsushita Laboratory
Kubernetes Release Team Release Signal Role について ~Kubernetes Meetup Tokyo #72~
by
Keisuke Ishigami
Nanami Doikawa_寄り道の誘発を目的とした旅行写真からのスポット印象語彙の推定に関する基礎検討_EC2025
by
Matsushita Laboratory
「グローバルワン全員経営」の実践を通じて進化し続けるファーストリテイリングのアーキテクチャ
by
Fast Retailing Co., Ltd.
超複素数
1.
超複素数ただの紹介 2019.3.29 原田 滉之 (大阪大学) 1
2.
複素数 • 𝑧 =
𝑎 + 𝑏𝑖 (𝑎, 𝑏 ∈ 𝑹, 𝑖2 = −1) 2
3.
複素数 • 𝑧 =
𝑎 + 𝑏𝑖 (𝑎, 𝑏 ∈ 𝑹, 𝑖2 = −1) • 二元数 • 共役: 𝑧 = 𝑎 − 𝑏𝑖 実部 虚部 3
4.
複素数の和と積 • 𝑧1 =
𝑎1 + 𝑏1 𝑖 • 𝑧2 = 𝑎2 + 𝑏2 𝑖 • 𝑧1 + 𝑧2 = 𝑎1 + 𝑎2 + 𝑏1 + 𝑏2 𝑖 • 𝑧1 𝑧2 = 𝑎1 𝑎2 − 𝑏1 𝑏2 + 𝑎1 𝑏2 + 𝑏1 𝑎2 𝑖 4
5.
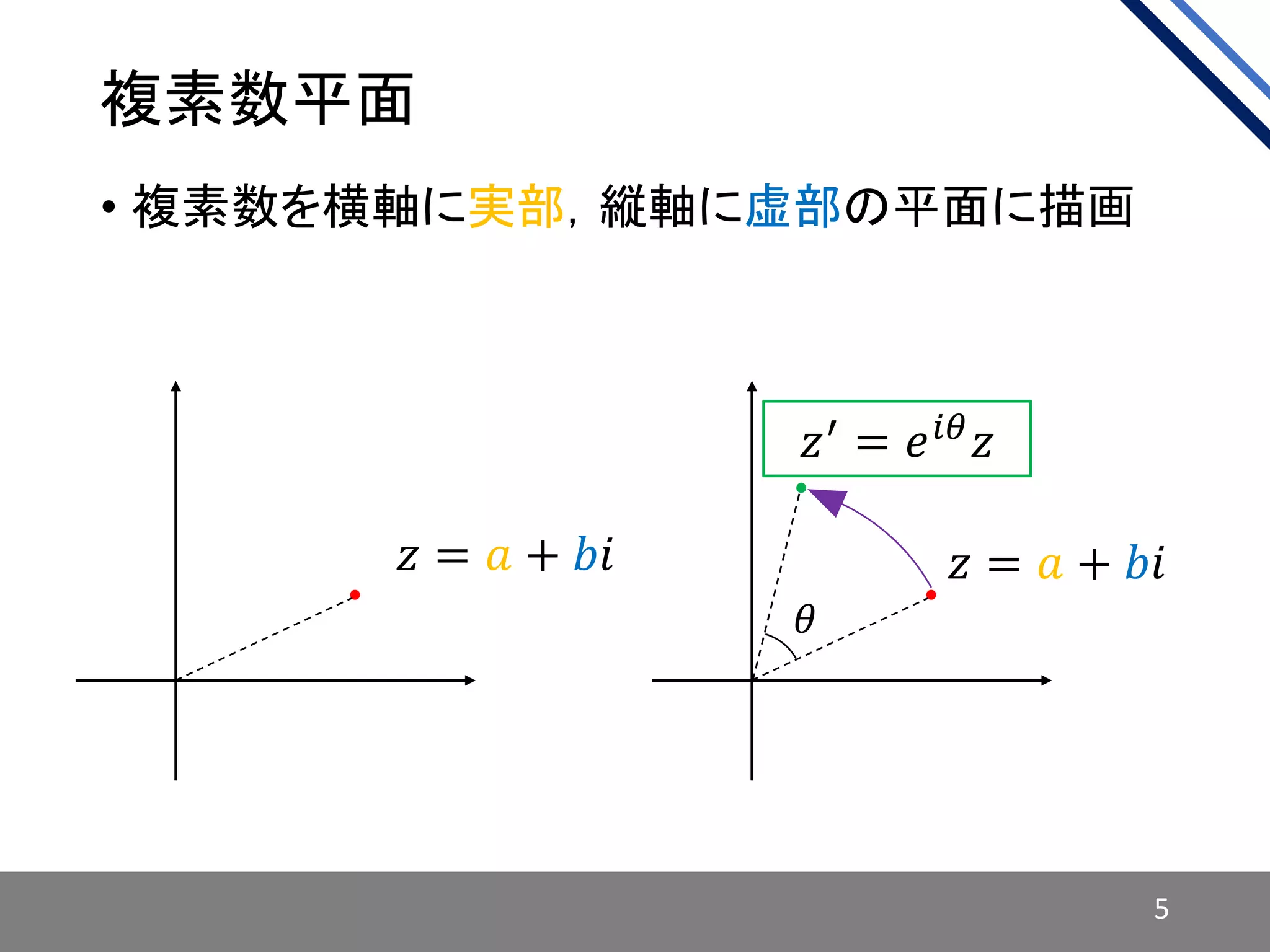
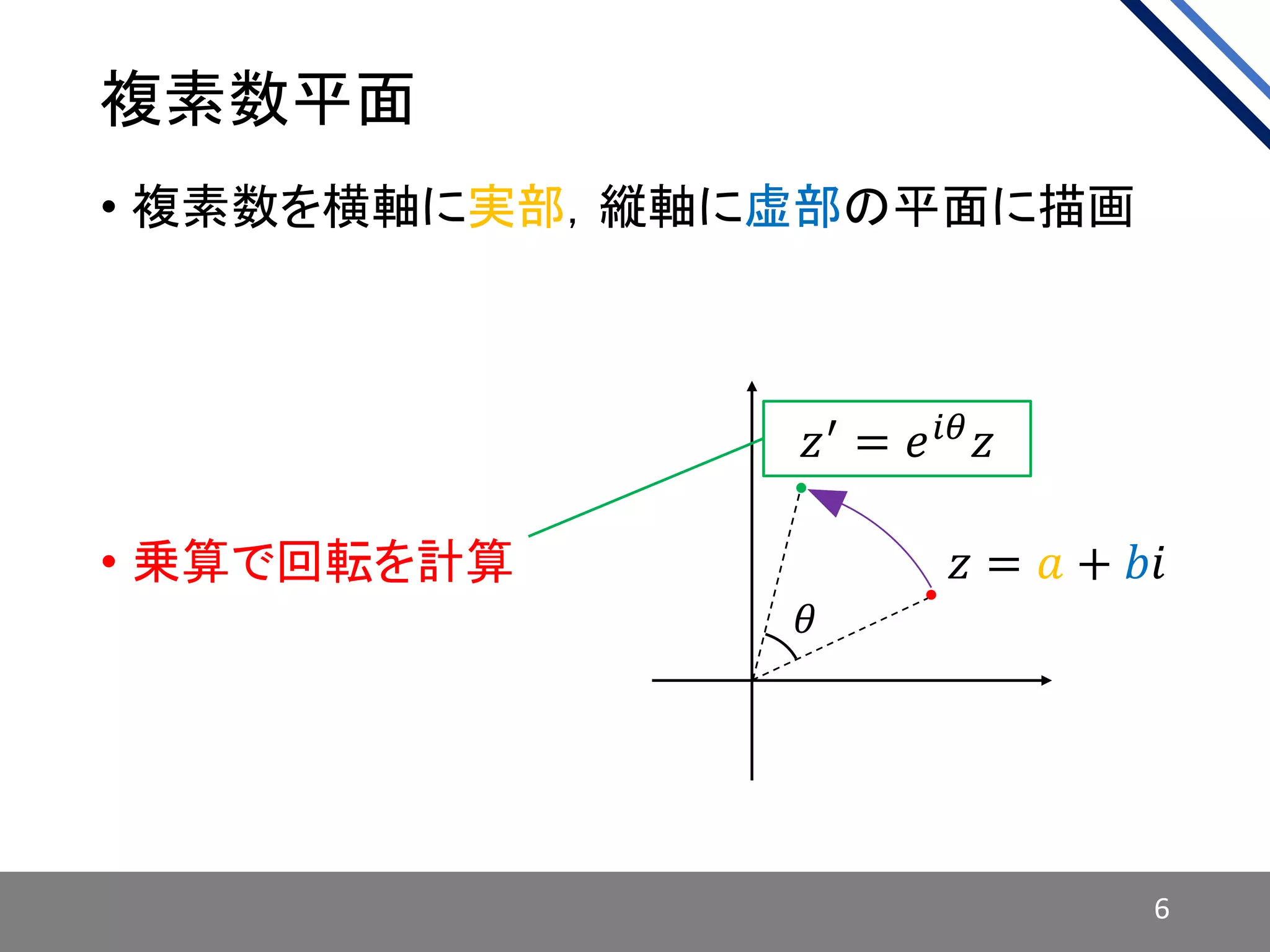
複素数平面 • 複素数を横軸に実部,縦軸に虚部の平面に描画 𝑧 =
𝑎 + 𝑏𝑖 𝑧 = 𝑎 + 𝑏𝑖 𝑧′ = 𝑒 𝑖𝜃 𝑧 5 𝜃
6.
複素数平面 • 複素数を横軸に実部,縦軸に虚部の平面に描画 • 乗算で回転を計算
𝑧 = 𝑎 + 𝑏𝑖 𝑧′ = 𝑒 𝑖𝜃 𝑧 6 𝜃
7.
複素数の応用 • 代数学の基本定理 • 図形の回転 •
微分方程式 • (ラプラス,フーリエ(逆)変換) • 2次元の運動の記述 7
8.
複素数の応用 • 代数学の基本定理 • 図形の回転 •
微分方程式 • (ラプラス,フーリエ(逆)変換) • 2次元の運動の記述 8
9.
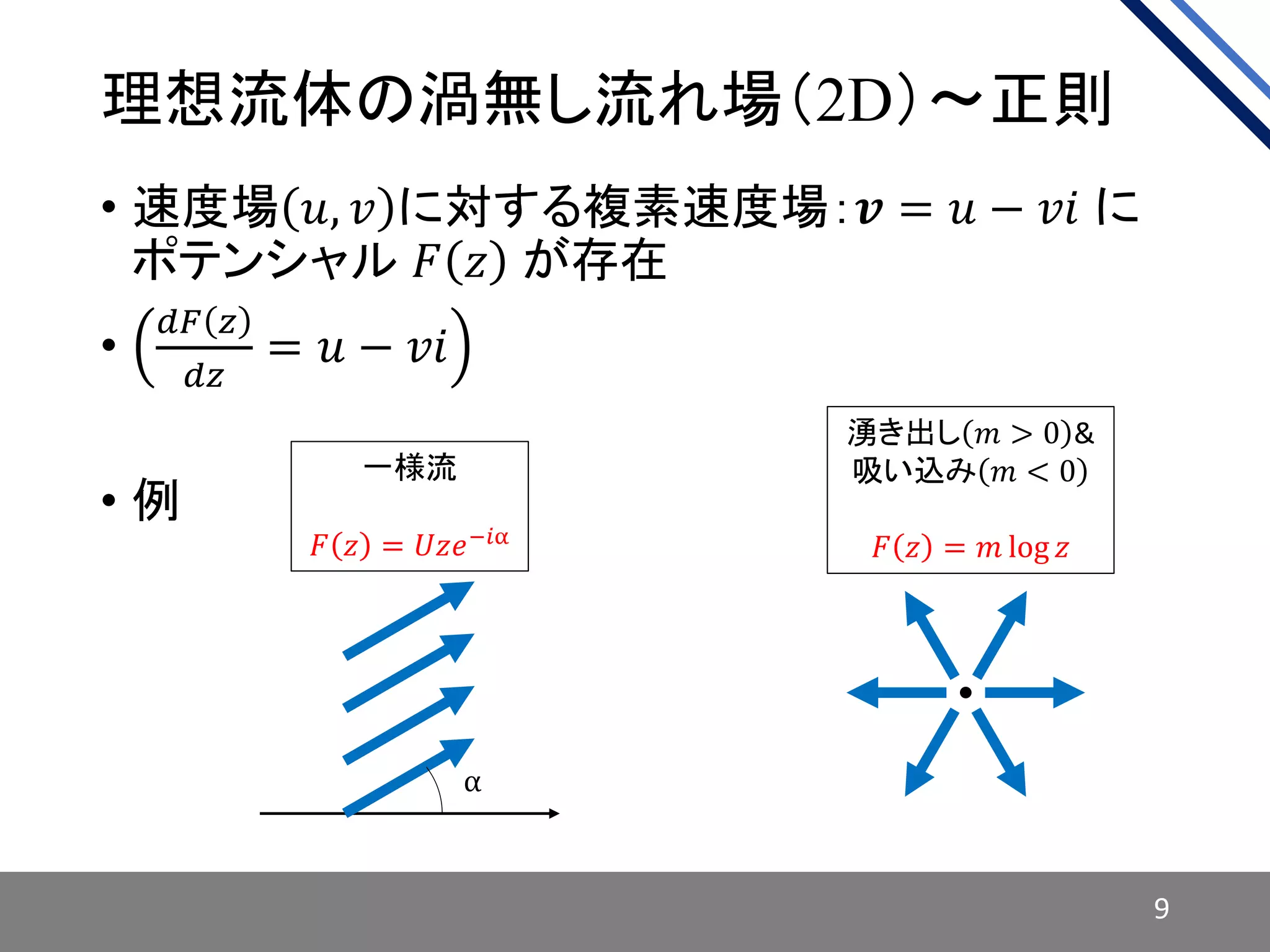
理想流体の渦無し流れ場(2D)~正則 • 速度場 𝑢,
𝑣 に対する複素速度場:𝒗 = 𝑢 − 𝑣𝑖 に ポテンシャル 𝐹 𝑧 が存在 • 𝑑𝐹 𝑧 𝑑𝑧 = 𝑢 − 𝑣𝑖 • 例 9 α 一様流 𝐹 𝑧 = 𝑈𝑧𝑒−𝑖α 湧き出し 𝑚 > 0 & 吸い込み 𝑚 < 0 𝐹 𝑧 = 𝑚 log 𝑧
10.
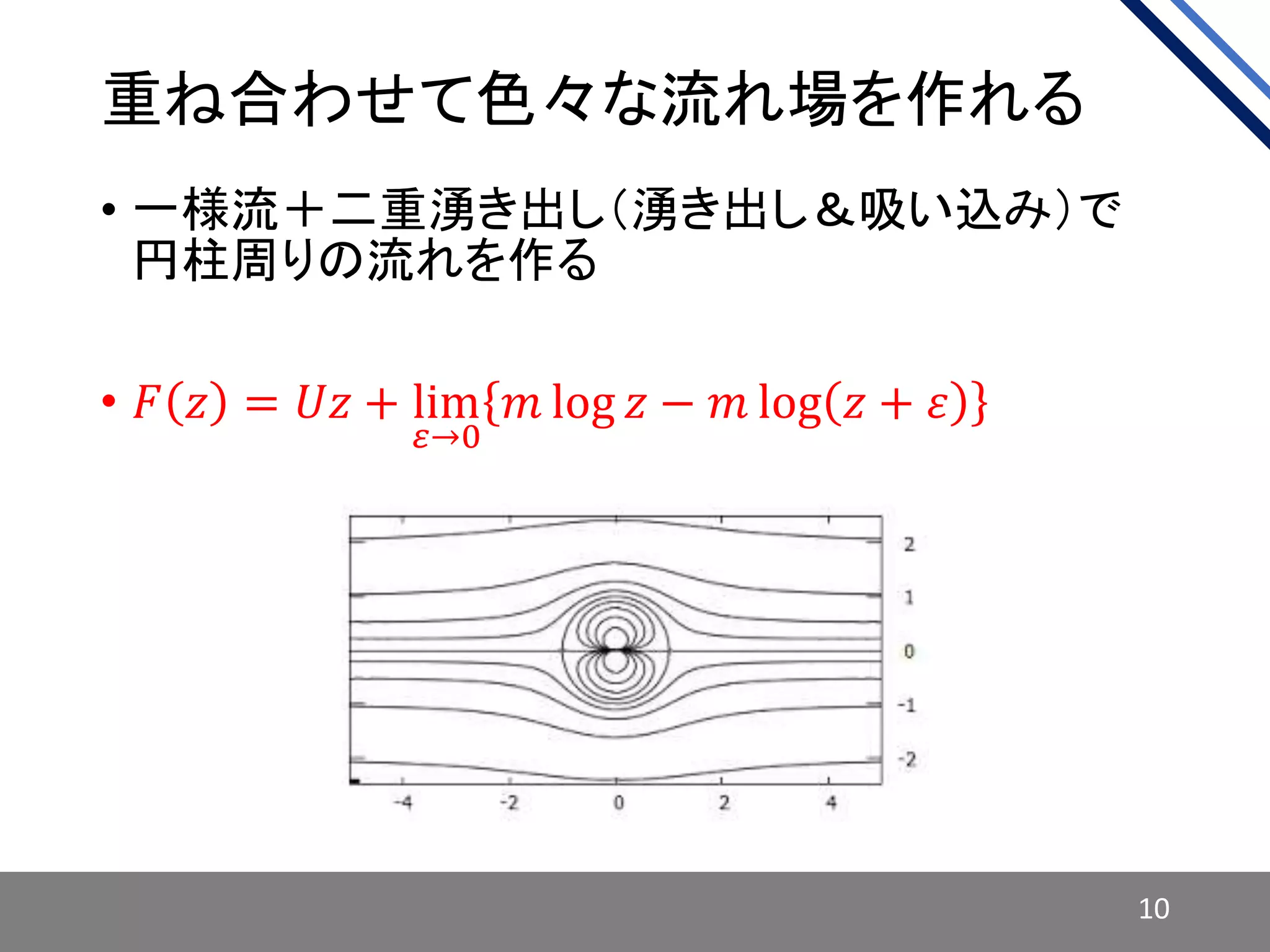
重ね合わせて色々な流れ場を作れる • 一様流+二重湧き出し(湧き出し&吸い込み)で 円柱周りの流れを作る • 𝐹
𝑧 = 𝑈𝑧 + lim 𝜀→0 𝑚 log 𝑧 − 𝑚 log 𝑧 + 𝜀 10
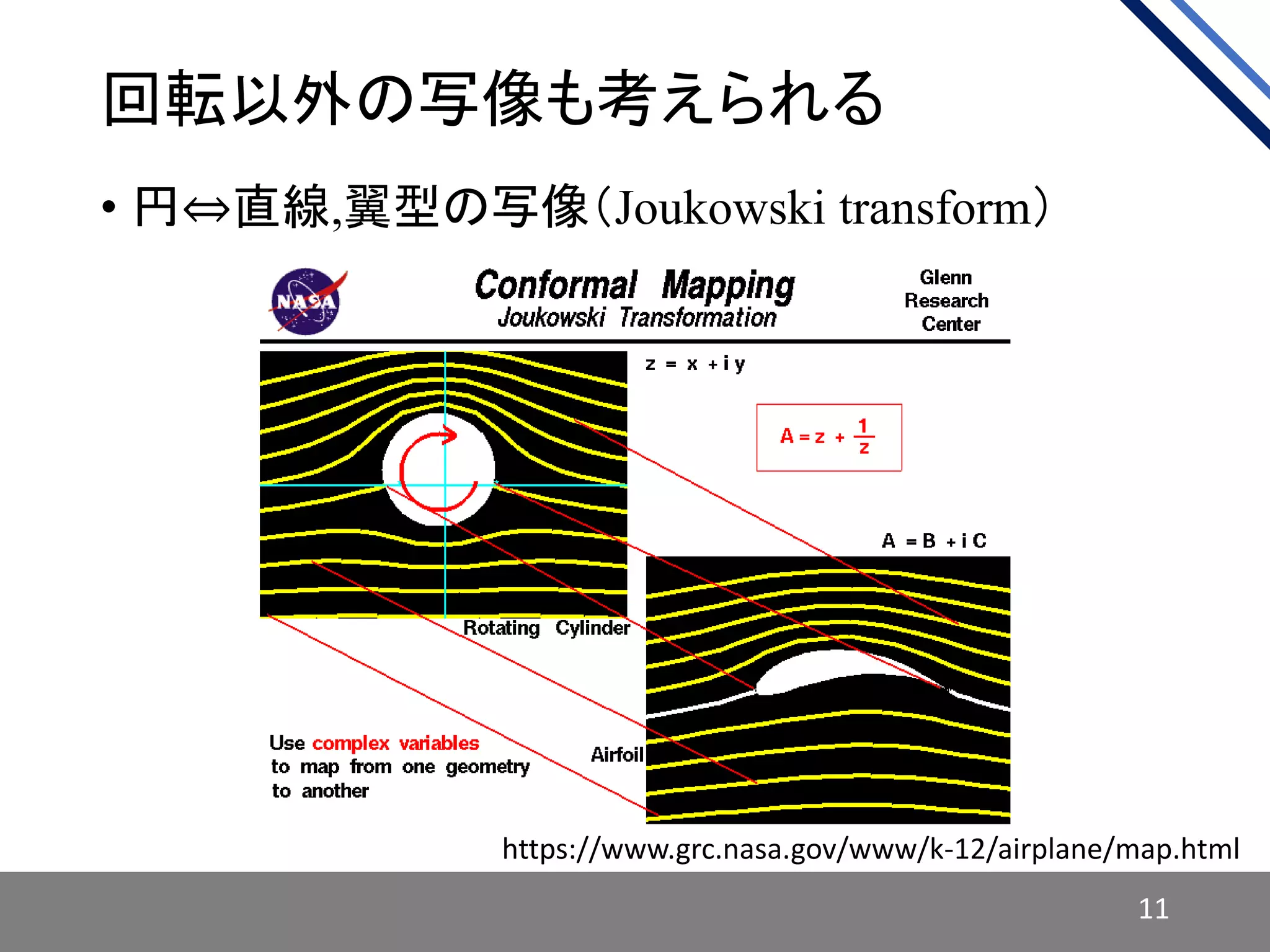
11.
回転以外の写像も考えられる • 円⇔直線,翼型の写像(Joukowski transform) 11 https://www.grc.nasa.gov/www/k-12/airplane/map.html
12.
超複素数 • 𝑧 =
𝑎 + 𝑏𝑖 + 𝑐𝑗 + 𝑑𝑘 • 𝑖(𝑎, 𝑏, 𝑐, 𝑑 ∈ 𝑹, 𝑖2 = 𝑗2 = 𝑘2 = 𝑖𝑗𝑘 = −1, • 𝑖(𝑖𝑗 = 𝑘, 𝑗𝑘 = 𝑖, 𝑘𝑖 = 𝑗, 𝑗𝑖 = −𝑘, 𝑘𝑗 = −𝑖, 𝑖𝑘 = −𝑗) 12
13.
超複素数 • 𝑧 =
𝑎 + 𝑏𝑖 + 𝑐𝑗 + 𝑑𝑘 • 𝑖(𝑎, 𝑏, 𝑐, 𝑑 ∈ 𝑹, 𝑖2 = 𝑗2 = 𝑘2 = 𝑖𝑗𝑘 = −1, • 𝑖(𝑖𝑗 = 𝑘, 𝑗𝑘 = 𝑖, 𝑘𝑖 = 𝑗, 𝑗𝑖 = −𝑘, 𝑘𝑗 = −𝑖, 𝑖𝑘 = −𝑗) • 四元数 • 乗算の交換法則が成立しない • 共役: 𝑧 = 𝑎 − 𝑏𝑖 − 𝑐𝑗 − 𝑑𝑘 13
14.
超複素数の和と積 • 𝑧1 =
𝑎1 + 𝑏1 𝑖 + 𝑐1 𝑗 + 𝑑1 𝑘 • 𝑧2 = 𝑎2 + 𝑏2 𝑖 + 𝑐2 𝑗 + 𝑑2 𝑘 • 𝑧1 + 𝑧2 = 𝑎1 + 𝑎2 + 𝑏1 + 𝑏2 𝑖 + 𝑐1 + 𝑐2 𝑗 + 𝑑1 + 𝑑2 𝑘 • 𝑧1 𝑧2 = 𝑎1 𝑎2 − 𝑏1 𝑏2 − 𝑐1 𝑐2 − 𝑑1 𝑑2 + 𝑎1 𝑏2 + 𝑏1 𝑎2 + 𝑐1 𝑑2 − 𝑑1 𝑐2 𝑖 • 𝑧1 𝑧2 = + 𝑎1 𝑐2 − 𝑏1 𝑑2 + 𝑐1 𝑎2 + 𝑑1 𝑏2 𝑗 + 𝑎1 𝑑2 + 𝑏1 𝑐2 − 𝑐1 𝑏2 + 𝑑1 𝑎2 𝑘 14
15.
超複素数空間 • 𝑧 =
𝑎 + 𝑏𝑖 + 𝑐𝑗 + 𝑑𝑘 • 𝑖(𝑎, 𝑏, 𝑐, 𝑑 ∈ 𝑹, 𝑖2 = 𝑗2 = 𝑘2 = 𝑖𝑗𝑘 = −1, • 𝑖(𝑖𝑗 = 𝑘, 𝑗𝑘 = 𝑖, 𝑘𝑖 = 𝑗, 𝑗𝑖 = −𝑘, 𝑘𝑗 = −𝑖, 𝑖𝑘 = −𝑗) • 交換則の不成立はベクトル積に似ている • 𝒊𝒙 × 𝒚 = 𝒛, 𝒚 × 𝒙 = −𝒛 • 複素数平面に対して, 𝑖, 𝑗, 𝑘 の単位次元の張る空 間と同一視できそう 15
16.
超複素数空間と(単純)回転 • 回転軸方向の単位ベクトル u
に対して q を定める • 𝒊𝒖 = 𝑢𝑖, 𝑢𝑗, 𝑢 𝑘 , 𝒖 = 1 • 𝑖𝑞 = cos 𝜃 2 + 𝑢𝑖 𝑖 + 𝑢𝑗 𝑗 + 𝑢 𝑘 𝑘 sin 𝜃 2 • このとき 𝑖, 𝑗, 𝑘 空間における u 軸まわりに 𝜃 だけ 回転する3次元回転は, • 𝑖𝑧′ = 𝑞𝑧 𝑞 16
17.
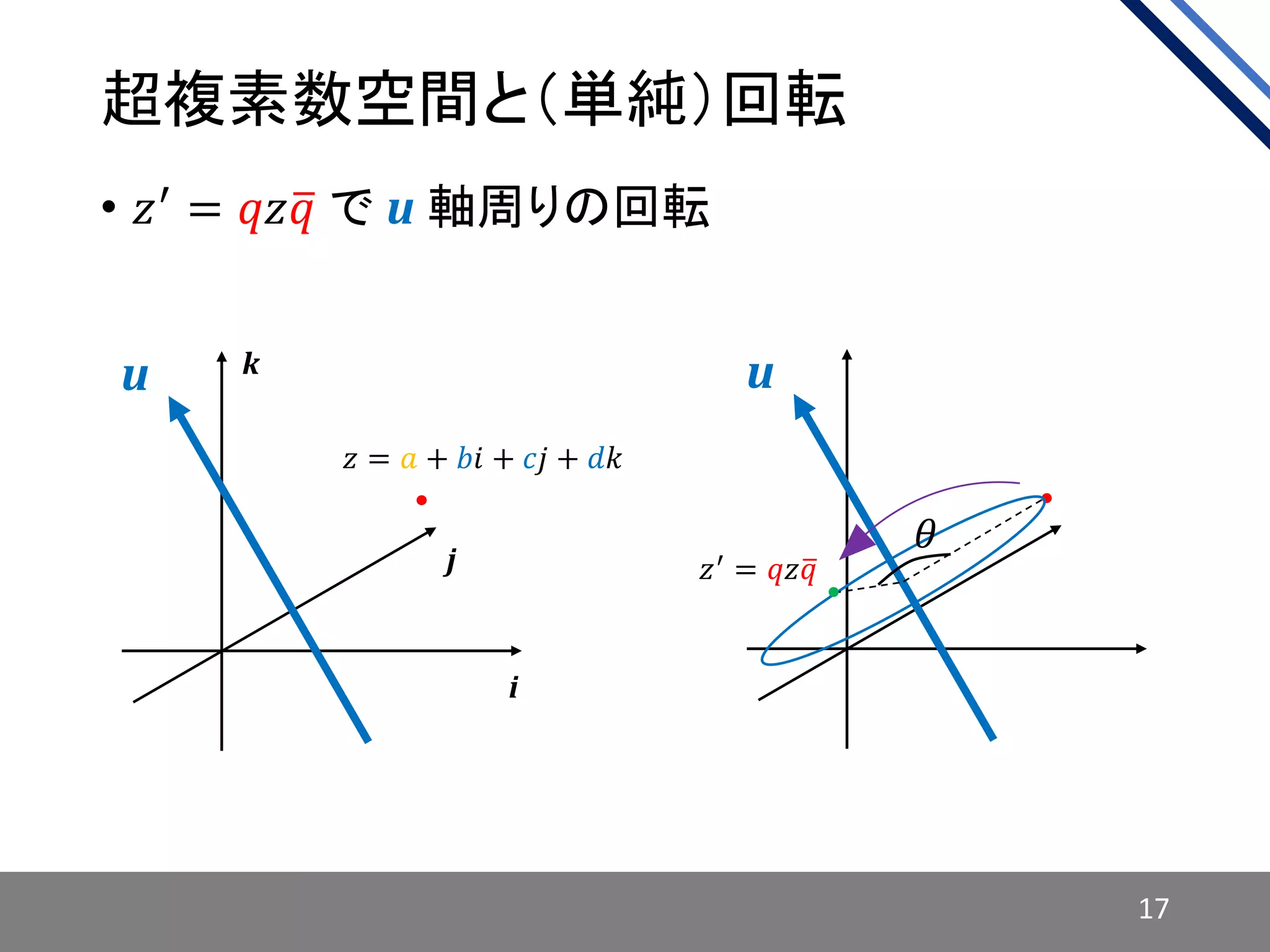
超複素数空間と(単純)回転 • 𝑧′ =
𝑞𝑧 𝑞 で u 軸周りの回転 17 u 𝑧 = 𝑎 + 𝑏𝑖 + 𝑐𝑗 + 𝑑𝑘 u 𝑧′ = 𝑞𝑧 𝑞 i j k 𝜃
18.
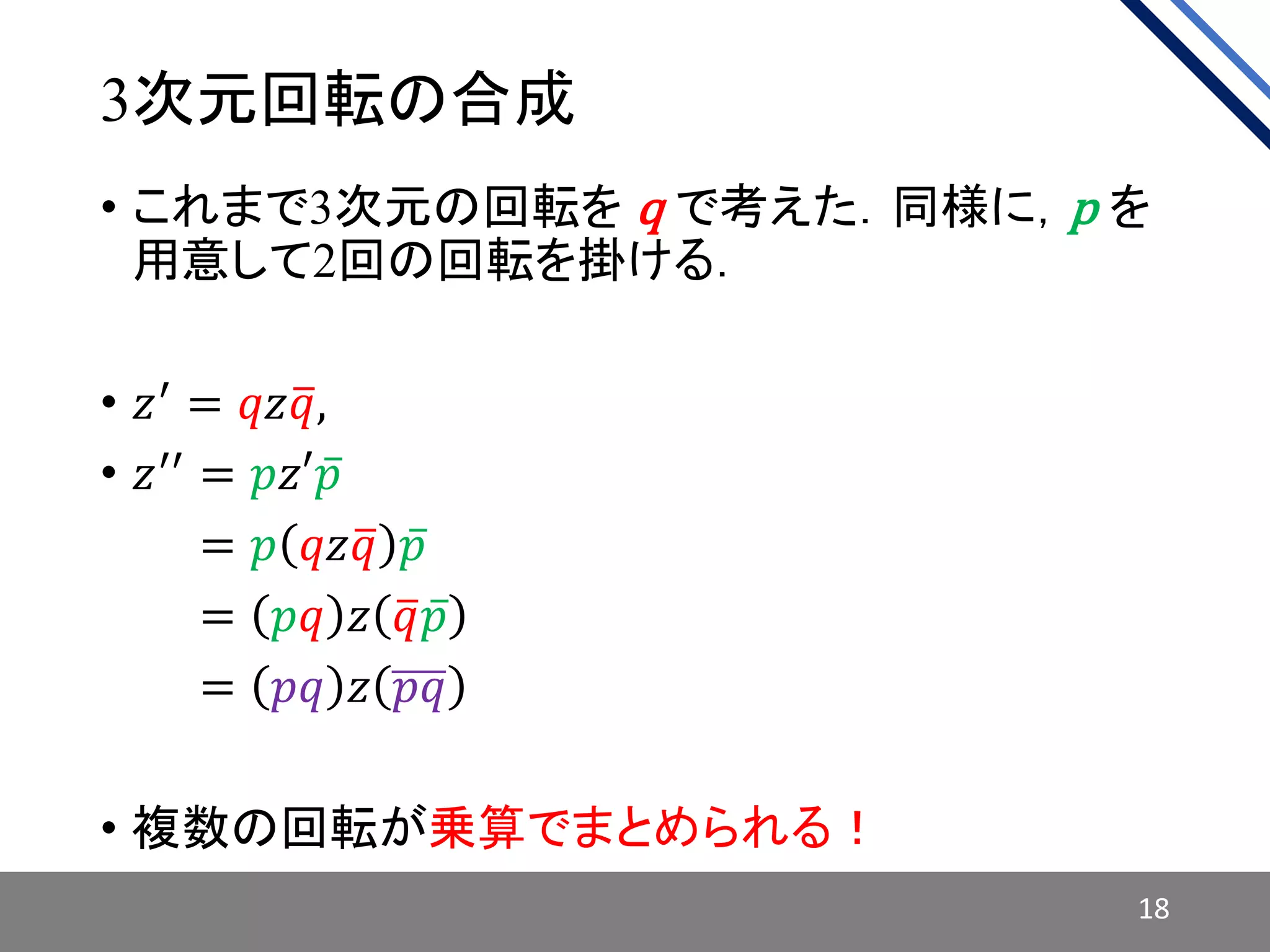
3次元回転の合成 • これまで3次元の回転を q
で考えた.同様に,p を 用意して2回の回転を掛ける. • 𝑧′ = 𝑞𝑧 𝑞, • 𝑧′′ = 𝑝𝑧′ 𝑝 • 𝑧′′ = 𝑝 𝑞𝑧 𝑞 𝑝 • 𝑧′′ = 𝑝𝑞 𝑧 𝑞 𝑝 • 𝑧′′ = 𝑝𝑞 𝑧 𝑝𝑞 • 複数の回転が乗算でまとめられる! 18
19.
四元数の応用 • CGの3D回転 • 衛星の姿勢計算 •
3次元の運動の記述? 19
20.
ちなみに • 三元数は無いのか? • 加算,乗算の法則があてはめられなかった •
一,二,四,八元数はある • 八元数は球面幾何などにも応用 20
21.
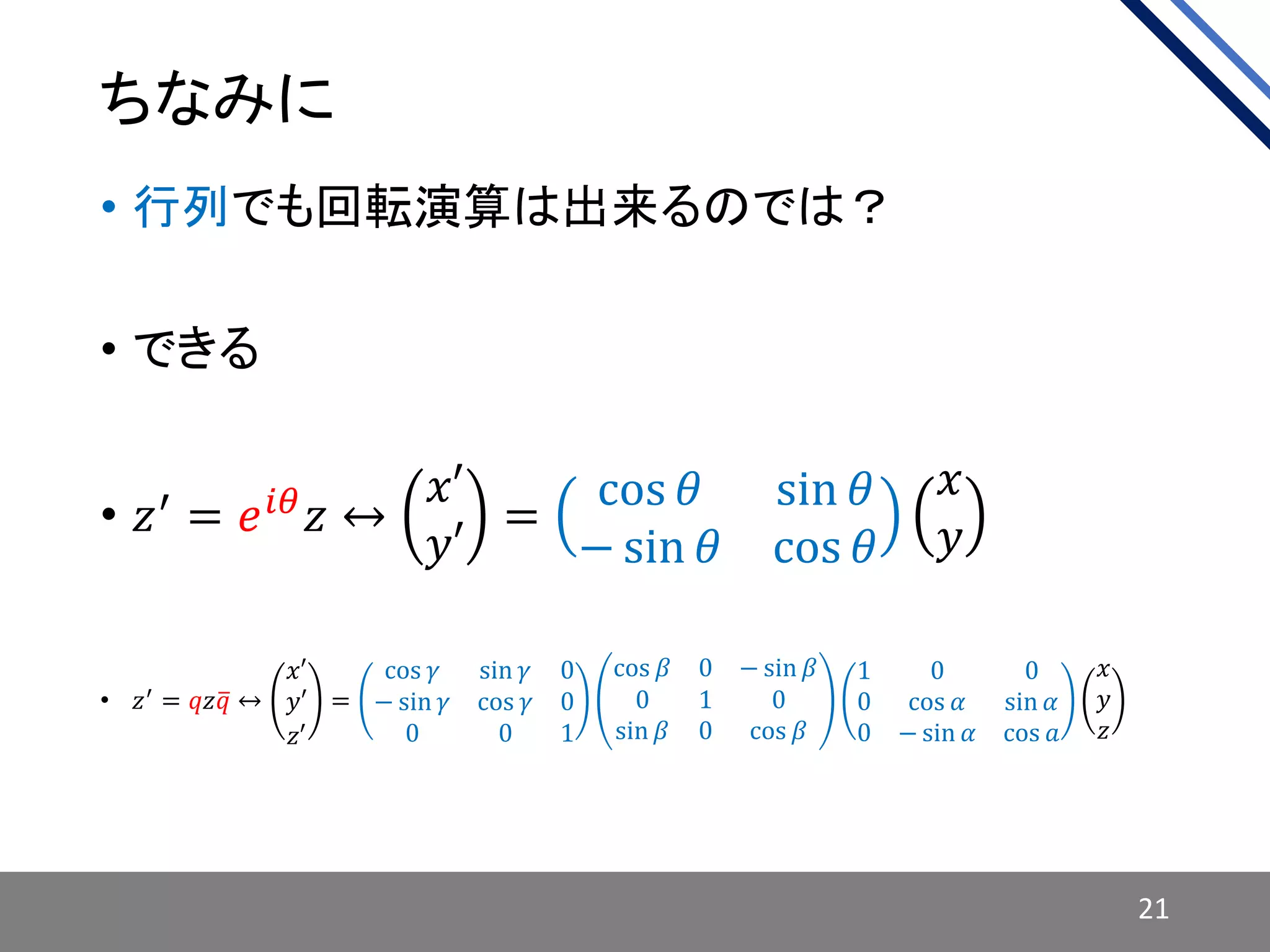
ちなみに • 行列でも回転演算は出来るのでは? • できる •
𝑧′ = 𝑒 𝑖𝜃 𝑧 ↔ 𝑥′ 𝑦′ = cos 𝜃 sin 𝜃 − sin 𝜃 cos 𝜃 𝑥 𝑦 • 𝑧′ = 𝑞𝑧 𝑞 ↔ 𝑥′ 𝑦′ 𝑧′ = cos 𝛾 sin 𝛾 0 − sin 𝛾 cos 𝛾 0 0 0 1 cos 𝛽 0 − sin 𝛽 0 1 0 sin 𝛽 0 cos 𝛽 1 0 0 0 cos 𝛼 sin 𝛼 0 − sin 𝛼 cos 𝑎 𝑥 𝑦 𝑧 21
22.
おまけ • ハミルトンの橋(Broom Bridge,
Dublin, Ireland) 22
23.
さいごに • ぜひロボットの空間姿勢の計算に超複素数を使っ てみては如何でしょうか. 23
Download

![古典プログラマ向け量子プログラミング入門 [フル版]](https://cdn.slidesharecdn.com/ss_thumbnails/sal-qc-prog-full-191128113651-thumbnail.jpg?width=640&height=640&fit=bounds)





















































