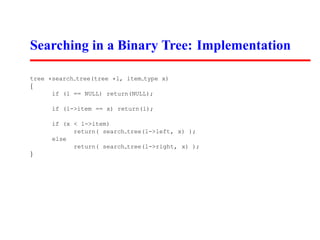
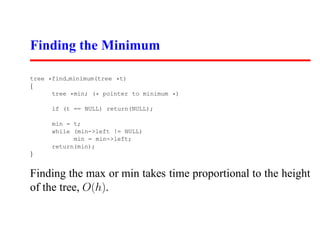
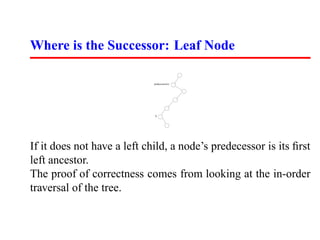
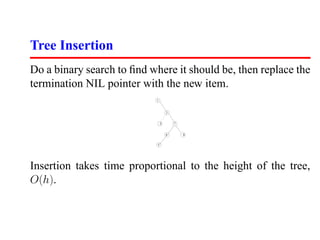
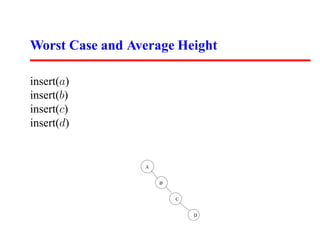
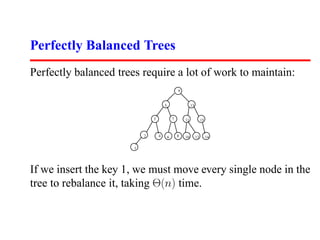
This document discusses dictionaries and binary search trees. It describes the basic operations for dictionaries like search, insert, delete, min, max, successor, and predecessor. It then explains how to implement these operations using binary search trees. The time complexity of each operation is O(h) where h is the height of the tree, which can be O(lg n) for a balanced tree but O(n) in the worst case for an unbalanced tree. Balanced search trees like red-black trees and AVL trees help guarantee O(lg n) time for operations.
![Dictionary / Dynamic Set Operations
Perhaps the most important class of data structures maintain
a set of items, indexed by keys.
• Search(S,k) – A query that, given a set S and a key value
k, returns a pointer x to an element in S such that key[x]
= k, or nil if no such element belongs to S.
• Insert(S,x) – A modifying operation that augments the set
S with the element x.
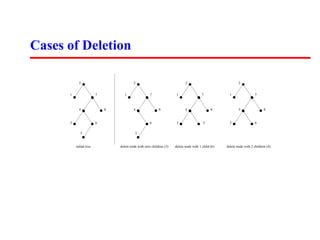
• Delete(S,x) – Given a pointer x to an element in the set S,
remove x from S. Observe we are given a pointer to an
element x, not a key value.](https://image.slidesharecdn.com/skienaalgorithm2007lecture05dictionarydatastructuretrees-111212074917-phpapp01/85/Skiena-algorithm-2007-lecture05-dictionary-data-structure-trees-2-320.jpg)